A Comprehensive Survey of Various Processor Types & Latest
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2.5 Classification of Parallel Computers
52 // Architectures 2.5 Classification of Parallel Computers 2.5 Classification of Parallel Computers 2.5.1 Granularity In parallel computing, granularity means the amount of computation in relation to communication or synchronisation Periods of computation are typically separated from periods of communication by synchronization events. • fine level (same operations with different data) ◦ vector processors ◦ instruction level parallelism ◦ fine-grain parallelism: – Relatively small amounts of computational work are done between communication events – Low computation to communication ratio – Facilitates load balancing 53 // Architectures 2.5 Classification of Parallel Computers – Implies high communication overhead and less opportunity for per- formance enhancement – If granularity is too fine it is possible that the overhead required for communications and synchronization between tasks takes longer than the computation. • operation level (different operations simultaneously) • problem level (independent subtasks) ◦ coarse-grain parallelism: – Relatively large amounts of computational work are done between communication/synchronization events – High computation to communication ratio – Implies more opportunity for performance increase – Harder to load balance efficiently 54 // Architectures 2.5 Classification of Parallel Computers 2.5.2 Hardware: Pipelining (was used in supercomputers, e.g. Cray-1) In N elements in pipeline and for 8 element L clock cycles =) for calculation it would take L + N cycles; without pipeline L ∗ N cycles Example of good code for pipelineing: §doi =1 ,k ¤ z ( i ) =x ( i ) +y ( i ) end do ¦ 55 // Architectures 2.5 Classification of Parallel Computers Vector processors, fast vector operations (operations on arrays). Previous example good also for vector processor (vector addition) , but, e.g. recursion – hard to optimise for vector processors Example: IntelMMX – simple vector processor. -

HELLAS: a Specialized Architecture for Interactive Deformable Object Modeling
HELLAS: A Specialized Architecture for Interactive Deformable Object Modeling Shrirang Yardi Benjamin Bishop Thomas Kelliher Department of Electrical and Department of Computing Department of Mathematics Computer Engineering Sciences and Computer Science Virginia Tech University of Scranton Goucher College Blacksburg, VA Scranton, PA Baltimore, MD [email protected] [email protected] [email protected] ABSTRACT more realistic models, it is likely that the computational Applications involving interactive modeling of deformable resources required by these simulations may continue to ex- objects require highly iterative, floating-point intensive nu- ceed those provided by the incremental advances in general- merical simulations. As the complexity of these models in- purpose systems [12]. This has created an interest in the creases, the computational power required for their simula- use of specialized hardware that provides high performance tion quickly grows beyond the capabilities of current gen- computational engines to accelerate such floating-point in- eral purpose systems. In this paper, we present the design tensive applications [6, 7]. of a low–cost, high–performance, specialized architecture to Our research focuses on the design of such specialized sys- accelerate these simulations. Our aim is to use such special- tems. However, our approach has several important differ- ized hardware to allow complex interactive physical model- ences as compared to previous work in this area: (i) we ing even on consumer-grade PCs. In this paper, we present specifically target algorithms that are numerically stable, details of the target algorithms, the HELLAS architecture, but are much more computationally intensive than those simulation results and lessons learned from our implemen- used by existing hardware implementations [3,6]; (ii) we aim tation. -

Computer Hardware Architecture Lecture 4
Computer Hardware Architecture Lecture 4 Manfred Liebmann Technische Universit¨atM¨unchen Chair of Optimal Control Center for Mathematical Sciences, M17 [email protected] November 10, 2015 Manfred Liebmann November 10, 2015 Reading List • Pacheco - An Introduction to Parallel Programming (Chapter 1 - 2) { Introduction to computer hardware architecture from the parallel programming angle • Hennessy-Patterson - Computer Architecture - A Quantitative Approach { Reference book for computer hardware architecture All books are available on the Moodle platform! Computer Hardware Architecture 1 Manfred Liebmann November 10, 2015 UMA Architecture Figure 1: A uniform memory access (UMA) multicore system Access times to main memory is the same for all cores in the system! Computer Hardware Architecture 2 Manfred Liebmann November 10, 2015 NUMA Architecture Figure 2: A nonuniform memory access (UMA) multicore system Access times to main memory differs form core to core depending on the proximity of the main memory. This architecture is often used in dual and quad socket servers, due to improved memory bandwidth. Computer Hardware Architecture 3 Manfred Liebmann November 10, 2015 Cache Coherence Figure 3: A shared memory system with two cores and two caches What happens if the same data element z1 is manipulated in two different caches? The hardware enforces cache coherence, i.e. consistency between the caches. Expensive! Computer Hardware Architecture 4 Manfred Liebmann November 10, 2015 False Sharing The cache coherence protocol works on the granularity of a cache line. If two threads manipulate different element within a single cache line, the cache coherency protocol is activated to ensure consistency, even if every thread is only manipulating its own data. -
Soft Machines Targets Ipcbottleneck
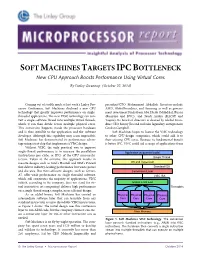
SOFT MACHINES TARGETS IPC BOTTLENECK New CPU Approach Boosts Performance Using Virtual Cores By Linley Gwennap (October 27, 2014) ................................................................................................................... Coming out of stealth mode at last week’s Linley Pro- president/CTO Mohammad Abdallah. Investors include cessor Conference, Soft Machines disclosed a new CPU AMD, GlobalFoundries, and Samsung as well as govern- technology that greatly improves performance on single- ment investment funds from Abu Dhabi (Mubdala), Russia threaded applications. The new VISC technology can con- (Rusnano and RVC), and Saudi Arabia (KACST and vert a single software thread into multiple virtual threads, Taqnia). Its board of directors is chaired by Global Foun- which it can then divide across multiple physical cores. dries CEO Sanjay Jha and includes legendary entrepreneur This conversion happens inside the processor hardware Gordon Campbell. and is thus invisible to the application and the software Soft Machines hopes to license the VISC technology developer. Although this capability may seem impossible, to other CPU-design companies, which could add it to Soft Machines has demonstrated its performance advan- their existing CPU cores. Because its fundamental benefit tage using a test chip that implements a VISC design. is better IPC, VISC could aid a range of applications from Without VISC, the only practical way to improve single-thread performance is to increase the parallelism Application (sequential code) (instructions per cycle, or IPC) of the CPU microarchi- Single Thread tecture. Taken to the extreme, this approach results in massive designs such as Intel’s Haswell and IBM’s Power8 OS and Hypervisor that deliver industry-leading performance but waste power Standard ISA and die area. -

C5ENPA1-DS, C-5E NETWORK PROCESSOR SILICON REVISION A1
Freescale Semiconductor, Inc... SILICON REVISION A1 REVISION SILICON C-5e NETWORK PROCESSOR Sheet Data Rev 03 PRELIMINARY C5ENPA1-DS/D Freescale Semiconductor,Inc. F o r M o r G e o I n t f o o : r w m w a t w i o . f n r e O e n s c T a h l i e s . c P o r o m d u c t , Freescale Semiconductor, Inc... Freescale Semiconductor,Inc. F o r M o r G e o I n t f o o : r w m w a t w i o . f n r e O e n s c T a h l i e s . c P o r o m d u c t , Freescale Semiconductor, Inc... Freescale Semiconductor,Inc. Silicon RevisionA1 C-5e NetworkProcessor Data Sheet Rev 03 C5ENPA1-DS/D F o r M o r Preli G e o I n t f o o : r w m w a t w i o . f n r e O e n s c T a h l i e s . c P o r o m m d u c t , inary Freescale Semiconductor, Inc... Freescale Semiconductor,Inc. F o r M o r G e o I n t f o o : r w m w a t w i o . f n r e O e n s c T a h l i e s . c P o r o m d u c t , Freescale Semiconductor, Inc. C5ENPA1-DS/D Rev 03 CONTENTS . -

Design and Implementation of a Stateful Network Packet Processing
610 IEEE/ACM TRANSACTIONS ON NETWORKING, VOL. 25, NO. 1, FEBRUARY 2017 Design and Implementation of a Stateful Network Packet Processing Framework for GPUs Giorgos Vasiliadis, Lazaros Koromilas, Michalis Polychronakis, and Sotiris Ioannidis Abstract— Graphics processing units (GPUs) are a powerful and TCAMs, have greatly reduced both the cost and time platform for building the high-speed network traffic process- to develop network traffic processing systems, and have ing applications using low-cost hardware. The existing systems been successfully used in routers [4], [7] and network tap the massively parallel architecture of GPUs to speed up certain computationally intensive tasks, such as cryptographic intrusion detection systems [27], [34]. These systems offer a operations and pattern matching. However, they still suffer from scalable method of processing network packets in high-speed significant overheads due to critical-path operations that are still environments. However, implementations based on special- being carried out on the CPU, and redundant inter-device data purpose hardware are very difficult to extend and program, transfers. In this paper, we present GASPP, a programmable net- and prohibit them from being widely adopted by the industry. work traffic processing framework tailored to modern graphics processors. GASPP integrates optimized GPU-based implemen- In contrast, the emergence of commodity many-core tations of a broad range of operations commonly used in the architectures, such as multicore CPUs and modern graph- network traffic processing applications, including the first purely ics processors (GPUs) has proven to be a good solution GPU-based implementation of network flow tracking and TCP for accelerating many network applications, and has led stream reassembly. -

Multiprocessing Contents
Multiprocessing Contents 1 Multiprocessing 1 1.1 Pre-history .............................................. 1 1.2 Key topics ............................................... 1 1.2.1 Processor symmetry ...................................... 1 1.2.2 Instruction and data streams ................................. 1 1.2.3 Processor coupling ...................................... 2 1.2.4 Multiprocessor Communication Architecture ......................... 2 1.3 Flynn’s taxonomy ........................................... 2 1.3.1 SISD multiprocessing ..................................... 2 1.3.2 SIMD multiprocessing .................................... 2 1.3.3 MISD multiprocessing .................................... 3 1.3.4 MIMD multiprocessing .................................... 3 1.4 See also ................................................ 3 1.5 References ............................................... 3 2 Computer multitasking 5 2.1 Multiprogramming .......................................... 5 2.2 Cooperative multitasking ....................................... 6 2.3 Preemptive multitasking ....................................... 6 2.4 Real time ............................................... 7 2.5 Multithreading ............................................ 7 2.6 Memory protection .......................................... 7 2.7 Memory swapping .......................................... 7 2.8 Programming ............................................. 7 2.9 See also ................................................ 8 2.10 References ............................................. -
ECE 590: Digital Systems Design Using Hardware Description Language (VHDL) Systolic Implementation of Faddeev's Algorithm in V
Project Report ECE 590: Digital Systems Design using Hardware Description Language (VHDL) Systolic Implementation of Faddeev’s Algorithm in VHDL. Final Project Tejas Tapsale. PSU ID: 973524088. Project Report Introduction: = In this project we are implementing Nash’s systolic implementation and Chuang an He,s systolic implementation for Faddeev’s algorithm. These two implementations have their own advantages and drawbacks. Here in this project report we first see detail of Nash implementation and then we will go for Chaung and He’s implementation. The organization of this report is like this:- 1. First we take detail idea about what is systolic architecture and how it can be used for matrix multiplication and its advantages and disadvantages. 2. Then we discuss about Gaussian Elimination for matrix computation and its properties. 3. Then we will see Faddeev’s algorithm and how it is used. 4. Systolic arrays for MATRIX TRIANGULARIZATION 5. We will discuss Nash implementation in detail and its VHDL coding. 6. Advantages and disadvantage of Nash systolic implementation. 7. Chaung and He’s implementation in detail and its VHDL coding. 8. Difficulties chased in this project. 9. Conclusion. 10. VHDL code for Nash Implementation. 11. VHDL code for Chaung and He’s Implementation. 12. Simulation Results. 13. References. 14. PowerPoint Presentation Project Report 1: Systolic Architecture: = A systolic array is composed of matrix-like rows of data processing units called cells. Data processing units (DPU) are similar to central processing units (CPU)s, (except for the usual lack of a program counter, since operation is transport-triggered, i.e., by the arrival of a data object). -

Embedded Multi-Core Processing for Networking
12 Embedded Multi-Core Processing for Networking Theofanis Orphanoudakis University of Peloponnese Tripoli, Greece [email protected] Stylianos Perissakis Intracom Telecom Athens, Greece [email protected] CONTENTS 12.1 Introduction ............................ 400 12.2 Overview of Proposed NPU Architectures ............ 403 12.2.1 Multi-Core Embedded Systems for Multi-Service Broadband Access and Multimedia Home Networks . 403 12.2.2 SoC Integration of Network Components and Examples of Commercial Access NPUs .............. 405 12.2.3 NPU Architectures for Core Network Nodes and High-Speed Networking and Switching ......... 407 12.3 Programmable Packet Processing Engines ............ 412 12.3.1 Parallelism ........................ 413 12.3.2 Multi-Threading Support ................ 418 12.3.3 Specialized Instruction Set Architectures ....... 421 12.4 Address Lookup and Packet Classification Engines ....... 422 12.4.1 Classification Techniques ................ 424 12.4.1.1 Trie-based Algorithms ............ 425 12.4.1.2 Hierarchical Intelligent Cuttings (HiCuts) . 425 12.4.2 Case Studies ....................... 426 12.5 Packet Buffering and Queue Management Engines ....... 431 399 400 Multi-Core Embedded Systems 12.5.1 Performance Issues ................... 433 12.5.1.1 External DRAMMemory Bottlenecks ... 433 12.5.1.2 Evaluation of Queue Management Functions: INTEL IXP1200 Case ................. 434 12.5.2 Design of Specialized Core for Implementation of Queue Management in Hardware ................ 435 12.5.2.1 Optimization Techniques .......... 439 12.5.2.2 Performance Evaluation of Hardware Queue Management Engine ............. 440 12.6 Scheduling Engines ......................... 442 12.6.1 Data Structures in Scheduling Architectures ..... 443 12.6.2 Task Scheduling ..................... 444 12.6.2.1 Load Balancing ................ 445 12.6.3 Traffic Scheduling ................... -

Computer Architecture Out-Of-Order Execution
Computer Architecture Out-of-order Execution By Yoav Etsion With acknowledgement to Dan Tsafrir, Avi Mendelson, Lihu Rappoport, and Adi Yoaz 1 Computer Architecture 2013– Out-of-Order Execution The need for speed: Superscalar • Remember our goal: minimize CPU Time CPU Time = duration of clock cycle × CPI × IC • So far we have learned that in order to Minimize clock cycle ⇒ add more pipe stages Minimize CPI ⇒ utilize pipeline Minimize IC ⇒ change/improve the architecture • Why not make the pipeline deeper and deeper? Beyond some point, adding more pipe stages doesn’t help, because Control/data hazards increase, and become costlier • (Recall that in a pipelined CPU, CPI=1 only w/o hazards) • So what can we do next? Reduce the CPI by utilizing ILP (instruction level parallelism) We will need to duplicate HW for this purpose… 2 Computer Architecture 2013– Out-of-Order Execution A simple superscalar CPU • Duplicates the pipeline to accommodate ILP (IPC > 1) ILP=instruction-level parallelism • Note that duplicating HW in just one pipe stage doesn’t help e.g., when having 2 ALUs, the bottleneck moves to other stages IF ID EXE MEM WB • Conclusion: Getting IPC > 1 requires to fetch/decode/exe/retire >1 instruction per clock: IF ID EXE MEM WB 3 Computer Architecture 2013– Out-of-Order Execution Example: Pentium Processor • Pentium fetches & decodes 2 instructions per cycle • Before register file read, decide on pairing Can the two instructions be executed in parallel? (yes/no) u-pipe IF ID v-pipe • Pairing decision is based… On data -

On the Efficiency of Register File Versus Broadcast Interconnect For
On the Efficiency of Register File versus Broadcast Interconnect for Collective Communications in Data-Parallel Hardware Accelerators Ardavan Pedram, Andreas Gerstlauer Robert A. van de Geijn Department of Electrical and Computer Engineering Department of Computer Science The University of Texas at Austin The University of Texas at Austin fardavan,[email protected] [email protected] Abstract—Reducing power consumption and increasing effi- on broadcast communication among a 2D array of PEs. In ciency is a key concern for many applications. How to design this paper, we focus on the LAC’s data-parallel broadcast highly efficient computing elements while maintaining enough interconnect and on showing how representative collective flexibility within a domain of applications is a fundamental question. In this paper, we present how broadcast buses can communication operations can be efficiently mapped onto eliminate the use of power hungry multi-ported register files this architecture. Such collective communications are a core in the context of data-parallel hardware accelerators for linear component of many matrix or other data-intensive operations algebra operations. We demonstrate an algorithm/architecture that often demand matrix manipulations. co-design for the mapping of different collective communication We compare our design with typical SIMD cores with operations, which are crucial for achieving performance and efficiency in most linear algebra routines, such as GEMM, equivalent data parallelism and with L1 and L2 caches that SYRK and matrix transposition. We compare a broadcast bus amount to an equivalent aggregate storage space. To do so, based architecture with conventional SIMD, 2D-SIMD and flat we examine efficiency and performance of the cores for data register file for these operations in terms of area and energy movement and data manipulation in both GEneral matrix- efficiency. -

Performance of a Computer (Chapter 4) Vishwani D
ELEC 5200-001/6200-001 Computer Architecture and Design Fall 2013 Performance of a Computer (Chapter 4) Vishwani D. Agrawal & Victor P. Nelson epartment of Electrical and Computer Engineering Auburn University, Auburn, AL 36849 ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 1 What is Performance? Response time: the time between the start and completion of a task. Throughput: the total amount of work done in a given time. Some performance measures: MIPS (million instructions per second). MFLOPS (million floating point operations per second), also GFLOPS, TFLOPS (1012), etc. SPEC (System Performance Evaluation Corporation) benchmarks. LINPACK benchmarks, floating point computing, used for supercomputers. Synthetic benchmarks. ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 2 Small and Large Numbers Small Large 10-3 milli m 103 kilo k 10-6 micro μ 106 mega M 10-9 nano n 109 giga G 10-12 pico p 1012 tera T 10-15 femto f 1015 peta P 10-18 atto 1018 exa 10-21 zepto 1021 zetta 10-24 yocto 1024 yotta ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 3 Computer Memory Size Number bits bytes 210 1,024 K Kb KB 220 1,048,576 M Mb MB 230 1,073,741,824 G Gb GB 240 1,099,511,627,776 T Tb TB ELEC 5200-001/6200-001 Performance Fall 2013 . Lecture 4 Units for Measuring Performance Time in seconds (s), microseconds (μs), nanoseconds (ns), or picoseconds (ps). Clock cycle Period of the hardware clock Example: one clock cycle means 1 nanosecond for a 1GHz clock frequency (or 1GHz clock rate) CPU time = (CPU clock cycles)/(clock rate) Cycles per instruction (CPI): average number of clock cycles used to execute a computer instruction.