A Statistical Examination of Image Stitching Software Packages for Use with Unmanned Aerial Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Free Tools Photosynth
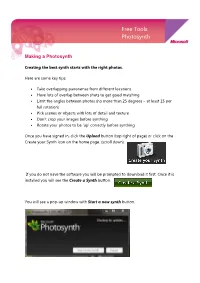
Free Tools Photosynth Making a Photosynth Creating the best synth starts with the right photos. Here are some key tips: • Take overlapping panoramas from different locations • Have lots of overlap between shots to get good matching • Limit the angles between photos (no more than 25 degrees – at least 15 per full rotation) • Pick scenes or objects with lots of detail and texture • Don’t crop your images before synthing • Rotate your photos to be ‘up’ correctly before synthing Once you have signed in, click the Upload button (top right of page) or click on the Create your Synth icon on the home page. (scroll down). If you do not have the software you will be prompted to download it first. Once it is installed you will see the Create a Synth button. You will see a pop-up window with Start a new synth button. Give your synth a name, tags (descriptive words) and description. Click Add Photos, browse to your files add them. Then click on the Synth button at the bottom of the page. Photosynth will do the rest for you. Making a Panorama Many photosynths consist of photos shot from a single location. Our friends in Microsoft Research have developed a free, world class panoramic image stitcher called Microsoft Image Composite Editor (ICE for short.) ICE takes a set of overlapping photographs of a scene shot from a single camera location, and creates a single high-resolution image. Photosynth now has support for uploading, exploring and viewing ICE panoramas alongside normal synths. Here’s how to create a panorama in ICE and upload it to Photosynth: 1. -
Mobilizing (Ourselves) for a Critical Digital Archaeology Adam Rabinowitz University of Texas at Austin, [email protected]
University of Wisconsin Milwaukee UWM Digital Commons Mobilizing the Past Art History 10-21-2016 5.2. Response: Mobilizing (Ourselves) for a Critical Digital Archaeology Adam Rabinowitz University of Texas at Austin, [email protected] Follow this and additional works at: https://dc.uwm.edu/arthist_mobilizingthepast Part of the Classical Archaeology and Art History Commons Recommended Citation Rabinowitz, Adam. “Response: Mobilizing (Ourselves) for a Critical Digital Archaeology.” In Mobilizing the Past for a Digital Future: The Potential of Digital Archaeology, edited by Erin Walcek Averett, Jody Michael Gordon, and Derek B. Counts, 493-518. Grand Forks, ND: The Digital Press at the University of North Dakota, 2016. This Book is brought to you for free and open access by UWM Digital Commons. It has been accepted for inclusion in Mobilizing the Past by an authorized administrator of UWM Digital Commons. For more information, please contact [email protected]. MOBILIZING THE PAST FOR A DIGITAL FUTURE MOBILIZING the PAST for a DIGITAL FUTURE The Potential of Digital Archaeology Edited by Erin Walcek Averett Jody Michael Gordon Derek B. Counts The Digital Press @ The University of North Dakota Grand Forks Creative Commons License This work is licensed under a Creative Commons By Attribution 4.0 International License. 2016 The Digital Press @ The University of North Dakota Book Design: Daniel Coslett and William Caraher Cover Design: Daniel Coslett Library of Congress Control Number: 2016917316 The Digital Press at the University of North Dakota, Grand Forks, North Dakota ISBN-13: 978-062790137 ISBN-10: 062790137 Version 1.1 (updated November 5, 2016) Table of Contents Preface & Acknowledgments v How to Use This Book xi Abbreviations xiii Introduction Mobile Computing in Archaeology: Exploring and Interpreting Current Practices 1 Jody Michael Gordon, Erin Walcek Averett, and Derek B. -

Corporations DEPARTMENT
○○○○○○○○○○○○○○○○○○○○○○○○○ Corporations DEPARTMENT Kucera International, Inc. to become one of the country’s largest full-service mapping 38133 Western Parkway firms. Headquartered in Ebensburg, PA, the Mapping Sci- Willoughby, OH 44094-5789 ences Division is staffed with 100 highly skilled professionals 216-975-4230; 216-975-4238 (fax) providing the following services: l Aerial Photography - We maintain two aircraft and two Kucera International Inc. is a professional corporation that aerial cameras for photography acquisition. Aircraft performs photogrammetric, surveying, engineering, cadastral, and cameras are operated by our own highly experi- and computer services for GIS, facility management, and re- enced crews. lated programs. l Surveying - We have adapted state-of-the-art technolo- Kucera’s capabilities and experience span all stages and gies such as GPS, electronic total stations and electronic elements of mapping program evolution. For program start-up field books. Our services range from property boundary and management, Kucera provides consulting, feasibility surveys to horizontal and vertical control/airborne GPS. studies, specifications, system recommendations, and pilot l Photo Lab - We maintain a full-service photographic projects. For program development, Kucera performs hard- laboratory that performs film developing, contact and ware/software acquisition, GIS data conversion, and data diapositive printing, enlargements and photo mosaics. collection/generation in the form of aerial photography, GPS l Analytical Triangulation -

Preparation of the Digital Elevation Model for Orthophoto Cr Production
The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume XLI-B3, 2016 XXIII ISPRS Congress, 12–19 July 2016, Prague, Czech Republic PREPARATION OF THE DIGITAL ELEVATION MODEL FOR ORTHOPHOTO CR PRODUCTION Z. Švec a, K. Pavelkaa a Czech Technical University in Prague, Faculty of Civil Engineering, Thákurova 7, Prague 6, 166 29, Czech Republic - [email protected] Commission III, WG III/1 KEY WORDS: Airborne Laser Scanning, Digital Elevation Model, Orthorectification, Surface Modelling, True Orthophoto ABSTRACT: The Orthophoto CR is produced in co-operation with the Land Survey Office and the Military Geographical and Hydrometeorological Office. The product serves to ensure a defence of the state, integrated crisis management, civilian tasks in support of the state administration and the local self-government of the Czech Republic as well. It covers the whole area of the Republic and for ensuring its up-to-datedness is reproduced in the biennial period. As the project is countrywide, it keeps the project within the same parameters in urban and rural areas as well. Due to economic reasons it can´t be produced as a true ortophoto because it requires large side and forward overlaps of the aerial photographs and a preparation of the digital surface model instead of the digital terrain model. Use of DTM without some objects of DSM for orthogonalization purposes cause undesirable image deformations in the Orthophoto. There are a few data sets available for forming a suitable elevation model. The principal source should represent DTMs made from data acquired by the airborne laser scanning of the entire area of the Czech Republic that was carried out in the years 2009-2013, the DMR4G in the grid form and the DMR5G in TIN form respectively. -
Chapter 4 Aerial Surveys
Survey Manual Chapter 4 Aerial Surveys Colorado Department of Transportation December 30, 2015 TABLE OF CONTENTS Chapter 4 – Aerial Surveys 4.1 General ............................................................................................................................................. 4 4.1.1 Acronyms found in this Chapter ................................................................................................ 4 4.1.2 Purpose of this Chapter .............................................................................................................. 5 4.1.3 Aerial Surveys ............................................................................................................................ 5 4.1.4 Aerial Photogrammetry .............................................................................................................. 5 4.1.5 Photogrammetric Advantages / Disadvantages .......................................................................... 6 4.1.6 Aerial LiDAR ............................................................................................................................. 6 4.1.7 LiDAR Advantages / Disadvantages .......................................................................................... 7 4.1.8 Pre-survey Conference – Aerial Survey ..................................................................................... 9 4.2 Ground Control for Aerial Surveys ............................................................................................ 10 4.2.1 General .................................................................................................................................... -

Los Gatos - Saratoga Camera Club Newsletter Vol
Los Gatos - Saratoga Camera Club Newsletter Vol. 31 Issue 8 August 2009 2009 Calendar August 3 Competition: Color, PJ, and Travel - Slides and Digital Images. Color, PJ, and Monochrome - Prints. 17 NO MEETING (Board Meeting Only: 7PM) ©Julie Kitzenberger September 7 NO MEETING 21 Program: TBD and Post Card Judging JULIE KITZENBERGER PHOTOGRAPHY Fine Art Landscapes - Travel - Events [email protected] 408-348-4199 http://photo.net/photos/JulieKitzenberger ©Julie Kitzenberger A Solo Show: “Captured Landscapes and Abstracts – with a Touch of Us” July 28 – August 23, 2009 Reception/Meet the Photographer: Saturday, August 1, 2009, 5 – 8 pm AEGIS GALLERY OF FINE ART www.Aegisgallery.com/ Gallery hours: 14531 Big Basin Way at 4th Street Sun, Tue, Wed: 11 AM – 7 PM Saratoga , CA 95070 Thu, Fri, Sat: 11 AM – 9 PM (408) 867-0171 Closed Mondays LOS GATOS/SARATOGA CAMERA CLUB EXHIBIT 2009 Theme: Through the Lens: Photographic Moments Sign Ups Begin July 6 It’s time to begin planning for our Club’s seventh annual photography exhibit that is scheduled to run November 12 through January 7, 2010. This exclusive LG/SCC show provides Club members the opportunity to exhibit their work in the “Art in the Council Chambers program sponsored by the Los Gatos Arts Commission and held in the Los Gatos Council Chambers. SIGN-UPS: Beginning at the July 6 meeting, Club sign-ups will run until September 1. At that time the final number of images per person (up to 2 each) will be determined. All exhibit photos must be matted and framed under glass (or plexi) See Club website for complete exhibit timelines and hanging information. -

Arcgis Online Will Change How You Think About Mapping and GIS Continued from Cover
ArcNews Esri | Summer 2012 | Vol. 34, No. 2 Strengthening the GIS Profession Using Web Maps to Tell Your Story David DiBiase, Director of Education, Industry Solutions, Esri For centuries, maps have been telling stories—chronicling discovery and conquest, documenting an understanding of the patterns and interrelationships that underlie human and natural systems. Is GIS a profession? If so, what’s its relationship to other professions in the geo- But only in the past few years have new technologies and new media vastly expanded the potential spatial fi eld? How can you tell if someone who calls herself a GIS profession- of maps to weave narratives. al—or a GIS educator for that matter—knows what she’s doing? You might be Maps are now interactive. Th ey enable and refl ect data analysis; they’re constantly updated; and surprised to learn that these are contentious questions in the United States and they’re enriched with multimedia content. Maps are newly supercharged by digital technologies: other parts of the world. Th ey’re contentious because the demand for GIS work GIS, the web, the cloud, and mobile communications. Now, maps can take users from globe to continued on page 4 street corner in seconds; they can dynamically show change over time; they can organize and pres- ent charts, graphs, photos, and video. With the swipe of a fi ngertip across a tablet, map users can compare one theme with another, ask questions of maps, add their own information to maps, and cast votes on maps. ArcGIS Online Will Change How continued on page 22 You Think About Mapping and GIS Th is month, Esri offi cially released ArcGIS Online for organizations. -

Digital Orthophoto Generation with Aerial Photos and Satellite Images and Analyzing of Factors Which Affect Accuracy
Digital Orthophoto Generation with Aerial Photos and Satellite Images and Analyzing of Factors which Affect Accuracy Eminnur AYHAN, Özlem ERDEN, Gülçin ATAY and Esra TUNÇ, Turkey Key words: Digital orthophoto, accuracy, DEM, land characteristic, satellite image, aerial photograph SUMMARY With the development of technology Digital photogrammetry has been started to be used widely in almost all area about mapping. Especially digital orthophotos which are a photogrammetric products, are being used common by lots of private sectors because of theirs easy interpretability. This has increased the demand on maps and has led to the need of researching on about accuracies. The resolution and the scale of the used aerial photos or satellite images, the quality and the scale of the DEM (Digital Elevation Model) and land topography are some of the factors that affect the accuracy of the orthophotos. The affects of the DEM and land topography on orthophoto accuracy have been investigated in this study. Firstly the affects of DEM on orthophoto maps which are produced either by aerial photos or satellite images has been investigated. Secondly, to determine the affect of topography on the process, some scanned aerial photos and the panchromatic (PAN) band of IKONOS satellite have been used. These scanned aerial photos are belong to the different regions in Turkey like Trabzon, Aydın, Tekirdağ ve Siirt, with different scales and resolutions (14μm-21μm) and they also represent different topography properties (rough, flat). Then the orthophoto maps, generated -

An Amateur's Guide to Observing and Imaging the Heavens
An Amateur’s Guide to Observing and Imaging the Heavens An Amateur’s Guide to Observing and Imaging the Heavens is a highly comprehensive guidebook that bridges the gap between ‘beginners and hobbyists’ books and the many specialised and subject-specific texts for more advanced amateur astronomers. Written by an experienced astronomer and educator, the book is a one-stop reference providing extensive information and advice about observing and imaging equipment, with detailed examples showing how best to use them. In addition to providing in-depth knowledge about every type of astronomical telescope and highlighting the strengths and weaknesses of each, the book offers advice on making visual observations of the Sun, Moon, planets, stars and galaxies. All types of modern astronomical imaging are covered, with step-by-step details given on the use of DSLRs and webcams for solar, lunar and planetary imaging and the use of DSLRs and cooled CCD cameras for deep-sky imaging. Ian Morison spent his professional career as a radio astronomer at the Jodrell Bank Observatory. The International Astronomical Union has recognised his work by naming an asteroid in his honour. He is patron of the Macclesfield Astronomical Society, which he also helped found, and a council member and past president of the Society for Popular Astronomy, United Kingdom. In 2007 he was appointed professor of astronomy at Gresham College, the oldest chair of astronomy in the world. He is the author of numerous articles for the astronomical press and of a university astronomy textbook, and writes a monthly online sky guide and audio podcast for the Jodrell Bank Observatory. -

Immersion in Early Architectural Design in the Age of Computing By
Immersion in Early Architectural Design in the Age of Computing By Kartikeya Anil Date A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Architecture in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Yehuda E. Kalay, Chair Professor Andrew Shanken Professor Whitney Davis Summer 2018 Abstract Immersion in Early Architectural Design in the Age of Computing by Kartikeya Anil Date Doctor of Philosophy in Architecture University of California, Berkeley Professor Yehuda E. Kalay, Chair This dissertation proposes a concept of immersion as an integral aspect of a general theory of the (early phase) architectural design act in the age of computing. Computing has influenced design in two major ways – as a metaphor shaping contemporary understanding of the design process, and as a machine used in the practice. The history of the relationship between these two modes of influence is traced to locate immersion in a model of the architectural design process. Early design is explored in this study by a comparative study of design across variously technologically mediated sketching environments. This process is considered as an individual process. Collaborative design is set aside. Computing has influenced design in two ways – as a metaphor for the process and as a machine used in the process. These two types of influences could also be understood to define two distinct tracks along which research in computer aided design has been developed. As a machine, computing has been studied in the fields like evaluation simulations in various domains such as acoustics, energy consumption, structural analysis, emergency evacuations, generative models, and representational models. -

Digital Orthophoto Generation with Aerial Photographs
E-ISSN 2281-4612 Academic Journal of Interdisciplinary Studies Vol 3 No 7 ISSN 2281-3993 MCSER Publishing, Rome-Italy November2014 Digital Orthophoto Generation with Aerial Photographs 1Lawali Rabiu 2Dauda Waziri A. 1&2 Federal Polytechnic Damaturu, Yobe State, Nigeria Email: [email protected] Doi:10.5901/ajis.2014.v3n7p133 Abstract Orthophoto process transforms a vertical aerial photograph in to the equivalent of traditional map. Yet it retains the advantages of a photograph-virtually displaying actual cultural and land features and the built environment rather than representing those features using symbols and lines. With the development of technology, Digital photogrammetry has started to be used widely in almost all areas about mapping. Especially digital orthophotos which are a photogrammetric products, are being used by lots of private sectors because of theirs easy interpretability. Several photogrammetric software which can be use to generate orthophotos are Leica Photogrammetric System (LPS), PCI Geomatica, Topcon pi 3000, Image Master, Erdas Imagine, VirtuoZo and others. In this study photogrammetric data from aerial photographs was used to generate orthophoto using erdas imagine software. The processing procedure of the system is described in detail. Sets of measurements (length and width) of selected buildings were obtained. The results obtained from this software are compared with ground survey measurement. The results showed that an accuracy of sub-meter of ±0.406m could be obtained from orthophoto generated using erdas imagine software. Conclusion is drawn concerning the suitability of the software for use in orthophoto generation. Future research is recommended based on two or more photogrammetric systems to comprise both side overlap and end overlap. -

Uso E Instalacion De Microsoft Image Composite Edition
2011 USO E INSTALACION DE MICROSOFT IMAGE COMPOSITE EDITION § INSTALACION DE MICROSOFT IMAGE COMPOSITE EDITION.- Requerimientos mínimos: SistemAs OperAtivo: Windows XP, Windows XP Service Pack 1, 2 o 3, Windows Vista y Windows Seven. RelAción de componentes para instAlAción: · Microsoft Visual C++ 2010 Redistributable (x86 o x64), según sea el caso. · Versión 4.0 de .NET Framework. · WIC (Windows Imaging Component), en caso que sea requerido en la instalación de .NET Framework , de preferencia de arquitectura x86 si en caso es Windows XP Service Pack 1 al 3, en español. · DESCARGA DEL SOFTWARE MICROSOFT IMAGE COMPOSITE EDITION.- El software ICE lo puede descargar de lA siguiente dirección, opcionAlmente lo puede encontrar en otros sitios web de descarga. http://research.microsoft.com/en-us/um/redmond/groups/ivm/ice/ Los requerimientos los puede encontrar en lA páginA: http://research.microsoft.com/en-us/um/redmond/groups/ivm/ice/ 1 2011 RECOMENDACIONES 1. Es recomendable recurrir al apoyo de la Unidad u Oficina de Informática de la respectiva Entidad para realizar la instalación. 2. Es posible que al momento de la instalación se requieran de algunos pre- requisitos, como Service Pack, actualizaciones. Por ello, es importante recurrir al apoyo informático. · Se muestra la imagen panorámica resultante por la aplicación, ya guardado en una unidad de disco. NotA.- Para realizar la composición de imágenes se debe cuidar que exista traslape (cubrir imágenes) entre imágenes para que New PanorAma pueda unirlos, de lo contrario rechaza. Como opción puede usarse New Structured PanorAma, pero los resultados no son de la misma calidad que ofrece la primera opción.