Panoramic Image Stitching
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Free Tools Photosynth
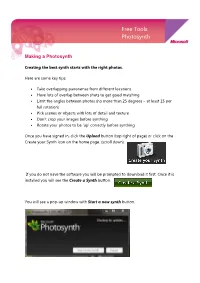
Free Tools Photosynth Making a Photosynth Creating the best synth starts with the right photos. Here are some key tips: • Take overlapping panoramas from different locations • Have lots of overlap between shots to get good matching • Limit the angles between photos (no more than 25 degrees – at least 15 per full rotation) • Pick scenes or objects with lots of detail and texture • Don’t crop your images before synthing • Rotate your photos to be ‘up’ correctly before synthing Once you have signed in, click the Upload button (top right of page) or click on the Create your Synth icon on the home page. (scroll down). If you do not have the software you will be prompted to download it first. Once it is installed you will see the Create a Synth button. You will see a pop-up window with Start a new synth button. Give your synth a name, tags (descriptive words) and description. Click Add Photos, browse to your files add them. Then click on the Synth button at the bottom of the page. Photosynth will do the rest for you. Making a Panorama Many photosynths consist of photos shot from a single location. Our friends in Microsoft Research have developed a free, world class panoramic image stitcher called Microsoft Image Composite Editor (ICE for short.) ICE takes a set of overlapping photographs of a scene shot from a single camera location, and creates a single high-resolution image. Photosynth now has support for uploading, exploring and viewing ICE panoramas alongside normal synths. Here’s how to create a panorama in ICE and upload it to Photosynth: 1. -
Mobilizing (Ourselves) for a Critical Digital Archaeology Adam Rabinowitz University of Texas at Austin, [email protected]
University of Wisconsin Milwaukee UWM Digital Commons Mobilizing the Past Art History 10-21-2016 5.2. Response: Mobilizing (Ourselves) for a Critical Digital Archaeology Adam Rabinowitz University of Texas at Austin, [email protected] Follow this and additional works at: https://dc.uwm.edu/arthist_mobilizingthepast Part of the Classical Archaeology and Art History Commons Recommended Citation Rabinowitz, Adam. “Response: Mobilizing (Ourselves) for a Critical Digital Archaeology.” In Mobilizing the Past for a Digital Future: The Potential of Digital Archaeology, edited by Erin Walcek Averett, Jody Michael Gordon, and Derek B. Counts, 493-518. Grand Forks, ND: The Digital Press at the University of North Dakota, 2016. This Book is brought to you for free and open access by UWM Digital Commons. It has been accepted for inclusion in Mobilizing the Past by an authorized administrator of UWM Digital Commons. For more information, please contact [email protected]. MOBILIZING THE PAST FOR A DIGITAL FUTURE MOBILIZING the PAST for a DIGITAL FUTURE The Potential of Digital Archaeology Edited by Erin Walcek Averett Jody Michael Gordon Derek B. Counts The Digital Press @ The University of North Dakota Grand Forks Creative Commons License This work is licensed under a Creative Commons By Attribution 4.0 International License. 2016 The Digital Press @ The University of North Dakota Book Design: Daniel Coslett and William Caraher Cover Design: Daniel Coslett Library of Congress Control Number: 2016917316 The Digital Press at the University of North Dakota, Grand Forks, North Dakota ISBN-13: 978-062790137 ISBN-10: 062790137 Version 1.1 (updated November 5, 2016) Table of Contents Preface & Acknowledgments v How to Use This Book xi Abbreviations xiii Introduction Mobile Computing in Archaeology: Exploring and Interpreting Current Practices 1 Jody Michael Gordon, Erin Walcek Averett, and Derek B. -

Los Gatos - Saratoga Camera Club Newsletter Vol
Los Gatos - Saratoga Camera Club Newsletter Vol. 31 Issue 8 August 2009 2009 Calendar August 3 Competition: Color, PJ, and Travel - Slides and Digital Images. Color, PJ, and Monochrome - Prints. 17 NO MEETING (Board Meeting Only: 7PM) ©Julie Kitzenberger September 7 NO MEETING 21 Program: TBD and Post Card Judging JULIE KITZENBERGER PHOTOGRAPHY Fine Art Landscapes - Travel - Events [email protected] 408-348-4199 http://photo.net/photos/JulieKitzenberger ©Julie Kitzenberger A Solo Show: “Captured Landscapes and Abstracts – with a Touch of Us” July 28 – August 23, 2009 Reception/Meet the Photographer: Saturday, August 1, 2009, 5 – 8 pm AEGIS GALLERY OF FINE ART www.Aegisgallery.com/ Gallery hours: 14531 Big Basin Way at 4th Street Sun, Tue, Wed: 11 AM – 7 PM Saratoga , CA 95070 Thu, Fri, Sat: 11 AM – 9 PM (408) 867-0171 Closed Mondays LOS GATOS/SARATOGA CAMERA CLUB EXHIBIT 2009 Theme: Through the Lens: Photographic Moments Sign Ups Begin July 6 It’s time to begin planning for our Club’s seventh annual photography exhibit that is scheduled to run November 12 through January 7, 2010. This exclusive LG/SCC show provides Club members the opportunity to exhibit their work in the “Art in the Council Chambers program sponsored by the Los Gatos Arts Commission and held in the Los Gatos Council Chambers. SIGN-UPS: Beginning at the July 6 meeting, Club sign-ups will run until September 1. At that time the final number of images per person (up to 2 each) will be determined. All exhibit photos must be matted and framed under glass (or plexi) See Club website for complete exhibit timelines and hanging information. -

An Amateur's Guide to Observing and Imaging the Heavens
An Amateur’s Guide to Observing and Imaging the Heavens An Amateur’s Guide to Observing and Imaging the Heavens is a highly comprehensive guidebook that bridges the gap between ‘beginners and hobbyists’ books and the many specialised and subject-specific texts for more advanced amateur astronomers. Written by an experienced astronomer and educator, the book is a one-stop reference providing extensive information and advice about observing and imaging equipment, with detailed examples showing how best to use them. In addition to providing in-depth knowledge about every type of astronomical telescope and highlighting the strengths and weaknesses of each, the book offers advice on making visual observations of the Sun, Moon, planets, stars and galaxies. All types of modern astronomical imaging are covered, with step-by-step details given on the use of DSLRs and webcams for solar, lunar and planetary imaging and the use of DSLRs and cooled CCD cameras for deep-sky imaging. Ian Morison spent his professional career as a radio astronomer at the Jodrell Bank Observatory. The International Astronomical Union has recognised his work by naming an asteroid in his honour. He is patron of the Macclesfield Astronomical Society, which he also helped found, and a council member and past president of the Society for Popular Astronomy, United Kingdom. In 2007 he was appointed professor of astronomy at Gresham College, the oldest chair of astronomy in the world. He is the author of numerous articles for the astronomical press and of a university astronomy textbook, and writes a monthly online sky guide and audio podcast for the Jodrell Bank Observatory. -

Immersion in Early Architectural Design in the Age of Computing By
Immersion in Early Architectural Design in the Age of Computing By Kartikeya Anil Date A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Architecture in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Yehuda E. Kalay, Chair Professor Andrew Shanken Professor Whitney Davis Summer 2018 Abstract Immersion in Early Architectural Design in the Age of Computing by Kartikeya Anil Date Doctor of Philosophy in Architecture University of California, Berkeley Professor Yehuda E. Kalay, Chair This dissertation proposes a concept of immersion as an integral aspect of a general theory of the (early phase) architectural design act in the age of computing. Computing has influenced design in two major ways – as a metaphor shaping contemporary understanding of the design process, and as a machine used in the practice. The history of the relationship between these two modes of influence is traced to locate immersion in a model of the architectural design process. Early design is explored in this study by a comparative study of design across variously technologically mediated sketching environments. This process is considered as an individual process. Collaborative design is set aside. Computing has influenced design in two ways – as a metaphor for the process and as a machine used in the process. These two types of influences could also be understood to define two distinct tracks along which research in computer aided design has been developed. As a machine, computing has been studied in the fields like evaluation simulations in various domains such as acoustics, energy consumption, structural analysis, emergency evacuations, generative models, and representational models. -

A Statistical Examination of Image Stitching Software Packages for Use with Unmanned Aerial Systems
A Statistical Examination of Image Stitching Software Packages For Use With Unmanned Aerial Systems John W. Gross and Benjamin W. Heumann Abstract There is growing demand for the collection of ultra-high spatial orthomosaic. This issue is typically addressed using aerial resolution imagery, such as is collected using unmanned aerial photogrammetric techniques. systems (UAS). Traditional methods of aerial photogrammetry One of the more conventional ways to handle the creation are often difficult or time consuming to utilize due to the lack of orthomosaics in aerial photogrammetry is through the of sufficiently accurate ancillary information. The goal of this use of automatic aerial triangulation (AAT) and bundle block study was to compare geometric accuracy, visual quality, and adjustment (BBA). In this method, software is able to utilize price of three commonly available mosaicking software pack- interior orientation (IO) information provided by the camera, a ages which offer a highly automated alternative to traditional global positioning system (GPS), and an inertial measurement methods: Photoscan Pro, Pix4D Pro Mapper, and Microsoft Im- unit (IMU) to match individual images together then adjust age Composite Editor (ICE). A total of 223 images with a spatial those blocks of images to match the real world (for a more resolution of 1.26 cm were collected by a UAS along with 70 thorough review of AAT and BBA readers should refer to Wolf ground control points. Microsoft Image Composite Editor had and Dewitt , 2000). The accuracy and quality of these proce- significantly fewer visual errors (Chi Square, p < .001), but it dures are highly dependent on the ability to provide the soft- had the poorest geometric accuracy with a RMSE of 34.7 cm ware with accurate information (Barazzetti et al., 2010; Turner (Tukey-Kramer, p < 0.05). -

Uso E Instalacion De Microsoft Image Composite Edition
2011 USO E INSTALACION DE MICROSOFT IMAGE COMPOSITE EDITION § INSTALACION DE MICROSOFT IMAGE COMPOSITE EDITION.- Requerimientos mínimos: SistemAs OperAtivo: Windows XP, Windows XP Service Pack 1, 2 o 3, Windows Vista y Windows Seven. RelAción de componentes para instAlAción: · Microsoft Visual C++ 2010 Redistributable (x86 o x64), según sea el caso. · Versión 4.0 de .NET Framework. · WIC (Windows Imaging Component), en caso que sea requerido en la instalación de .NET Framework , de preferencia de arquitectura x86 si en caso es Windows XP Service Pack 1 al 3, en español. · DESCARGA DEL SOFTWARE MICROSOFT IMAGE COMPOSITE EDITION.- El software ICE lo puede descargar de lA siguiente dirección, opcionAlmente lo puede encontrar en otros sitios web de descarga. http://research.microsoft.com/en-us/um/redmond/groups/ivm/ice/ Los requerimientos los puede encontrar en lA páginA: http://research.microsoft.com/en-us/um/redmond/groups/ivm/ice/ 1 2011 RECOMENDACIONES 1. Es recomendable recurrir al apoyo de la Unidad u Oficina de Informática de la respectiva Entidad para realizar la instalación. 2. Es posible que al momento de la instalación se requieran de algunos pre- requisitos, como Service Pack, actualizaciones. Por ello, es importante recurrir al apoyo informático. · Se muestra la imagen panorámica resultante por la aplicación, ya guardado en una unidad de disco. NotA.- Para realizar la composición de imágenes se debe cuidar que exista traslape (cubrir imágenes) entre imágenes para que New PanorAma pueda unirlos, de lo contrario rechaza. Como opción puede usarse New Structured PanorAma, pero los resultados no son de la misma calidad que ofrece la primera opción. -

Final Copy 2021 06 24 Foyer
This electronic thesis or dissertation has been downloaded from Explore Bristol Research, http://research-information.bristol.ac.uk Author: Foyer, Clement M Title: Abstractions for Portable Data Management in Heterogeneous Memory Systems General rights Access to the thesis is subject to the Creative Commons Attribution - NonCommercial-No Derivatives 4.0 International Public License. A copy of this may be found at https://creativecommons.org/licenses/by-nc-nd/4.0/legalcode This license sets out your rights and the restrictions that apply to your access to the thesis so it is important you read this before proceeding. Take down policy Some pages of this thesis may have been removed for copyright restrictions prior to having it been deposited in Explore Bristol Research. However, if you have discovered material within the thesis that you consider to be unlawful e.g. breaches of copyright (either yours or that of a third party) or any other law, including but not limited to those relating to patent, trademark, confidentiality, data protection, obscenity, defamation, libel, then please contact [email protected] and include the following information in your message: •Your contact details •Bibliographic details for the item, including a URL •An outline nature of the complaint Your claim will be investigated and, where appropriate, the item in question will be removed from public view as soon as possible. Abstractions for Portable Data Management in Heterogeneous Memory Systems Clément Foyer supervised by Simon McIntosh-Smith and Adrian Tate and Tim Dykes A dissertation submitted to the University of Bristol in accordance with the requirements for award of the degree of Doctor of Philosophy in the Faculty of Engineering, School of Computer Science. -

OSINT Handbook September 2020
OPEN SOURCE INTELLIGENCE TOOLS AND RESOURCES HANDBOOK 2020 OPEN SOURCE INTELLIGENCE TOOLS AND RESOURCES HANDBOOK 2020 Aleksandra Bielska Noa Rebecca Kurz, Yves Baumgartner, Vytenis Benetis 2 Foreword I am delighted to share with you the 2020 edition of the OSINT Tools and Resources Handbook. Once again, the Handbook has been revised and updated to reflect the evolution of this discipline, and the many strategic, operational and technical challenges OSINT practitioners have to grapple with. Given the speed of change on the web, some might question the wisdom of pulling together such a resource. What’s wrong with the Top 10 tools, or the Top 100? There are only so many resources one can bookmark after all. Such arguments are not without merit. My fear, however, is that they are also shortsighted. I offer four reasons why. To begin, a shortlist betrays the widening spectrum of OSINT practice. Whereas OSINT was once the preserve of analysts working in national security, it now embraces a growing class of professionals in fields as diverse as journalism, cybersecurity, investment research, crisis management and human rights. A limited toolkit can never satisfy all of these constituencies. Second, a good OSINT practitioner is someone who is comfortable working with different tools, sources and collection strategies. The temptation toward narrow specialisation in OSINT is one that has to be resisted. Why? Because no research task is ever as tidy as the customer’s requirements are likely to suggest. Third, is the inevitable realisation that good tool awareness is equivalent to good source awareness. Indeed, the right tool can determine whether you harvest the right information. -

How to View Panoramic Photos on Pc Free Download How to View Panoramic Photos on Pc Free Download
how to view panoramic photos on pc free download How to view panoramic photos on pc free download. Today's digital cameras and even smartphones provide pictures with a resolution that is far beyond the capabilities of computer monitors. Find out what's really inside your pictures! Check out the free Panorado viewer! See the whole of it! When you look at a panorama, you are right in the center of a virtual location. Panoramic images can be easily created from camera or smartphone shots. With the Panorado viewer, you'll get them on your computer screen! Panorado 5.0. is a comfortable image viewer, browser, and organizer for Windows. Find out more about Panorado 5.0! See a larger demo! Download and test it! [Win32] [Win64] Panorado JS 2.5. is the state-of-the-art HTML5 image viewer for websites and web applications. How to view panoramic photos on pc free download. Completing the CAPTCHA proves you are a human and gives you temporary access to the web property. What can I do to prevent this in the future? If you are on a personal connection, like at home, you can run an anti-virus scan on your device to make sure it is not infected with malware. If you are at an office or shared network, you can ask the network administrator to run a scan across the network looking for misconfigured or infected devices. Another way to prevent getting this page in the future is to use Privacy Pass. You may need to download version 2.0 now from the Chrome Web Store. -
Mission UAS Task Guide
CIVIL AIR PATROL U.S. Air Force Auxiliary Mission UAS Task Guide Small Unmanned Aerial System (sUAS) Mission Pilot and Technician July 2019 Contents Contents ........................................................................................................................................................................ 2 O-0204 Locate a Point on a Map Using Latitude and Longitude ................................................................................. 4 O-0205 Locate a Point on a Map Using the CAP Grid System .................................................................................... 7 O-5001 Demonstrate Aircraft & Ground Team Coordination ...................................................................................... 9 O-5002 Describe How ELT's Are Detected ............................................................................................................... 13 O-5003 Discuss Consideration Variables to Image Composition and Compose an Image ........................................ 16 O-5004 Transfer Images to and View Images on a Computer ................................................................................... 18 O-5005 Discuss CAP Image / Graphic Requirements and Image & Orthomosaic Processing Software ................... 21 O-5006 Prepare an Orthomosaic Image Utilizing Orthomosaic Image Processing Software .................................... 25 O-5007 Demonstrate Proper Use, Charging, Maintenance, and Shipping of UAS Battery Systems ......................... 29 O-5008 Demonstrate -

Annual Report—2019
The Royal Astronomical Society of Canada La Société Royale d’Astonomie du Canada annual report rapport annuel 2019 The Royal Astronomical Society of Canada / 2019 Annual Report • La Société royale d’astronomie du Canada / Rapport annuel 2019 1 Table of Contents Royal Astronomical Society of Canada—2020 3 Annual General Meeting 2020—Agenda 4 AGM Minutes—2019 5 President’s Message 7 Executive Director’s Report 8 Secretary’s Message 9 Treasurer’s Message 11 Auditor’s Report 12 History Committee Annual Report—2019 26 Public Speaker Program—2019 26 Dorner Telescope Museum 27 Special Projects Program 28 Inclusivity & Diversity Committee Report—2019 29 Motion to Amend By-Law No. 1 29 Annual Reports from the Centres 30 Centre Treasurers’ Reports for Fiscal Year 2019 65 Donations 2019 68 2020 Award Winners 70 2019 Certificates 70 Past Award Winners 71 Officers and Councils of the Centres—2020 74 Front Cover Photograph— Peter Visima (Toronto) Produced by James Edgar Note—The complete Annual Report is available on-line at: Layout and design by Catherine Berry rasc.ca/annual-report-2019 2 The Royal Astronomical Society of Canada / 2019 Annual Report • La Société royale d’astronomie du Canada / Rapport annuel 2019 Royal Astronomical Society of Canada—2020 RASC Web Site: rasc.ca RASC eStore: secure.rasc.ca/RASC/Store/StoreMain.aspx National Office: 203-4920 Dundas Street W, Toronto ON M9A 1B7, Canada Phone—416-924-7973 Email—[email protected] Executive Director: Dr. Philip Groff [email protected] Accounting Manager: Renata Koziol [email protected] Membership Coordinator: Adela Zyfi [email protected] Youth Outreach Coordinator Jenna Hinds [email protected] Fundraising consultant Lisa Di Veto [email protected] Communications & Marketing Coordinator Eric Wickham [email protected] Officers President: Dr.