Craters of the Pluto-Charon System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Planetary Geologic Mappers Annual Meeting
Program Lunar and Planetary Institute 3600 Bay Area Boulevard Houston TX 77058-1113 Planetary Geologic Mappers Annual Meeting June 12–14, 2018 • Knoxville, Tennessee Institutional Support Lunar and Planetary Institute Universities Space Research Association Convener Devon Burr Earth and Planetary Sciences Department, University of Tennessee Knoxville Science Organizing Committee David Williams, Chair Arizona State University Devon Burr Earth and Planetary Sciences Department, University of Tennessee Knoxville Robert Jacobsen Earth and Planetary Sciences Department, University of Tennessee Knoxville Bradley Thomson Earth and Planetary Sciences Department, University of Tennessee Knoxville Abstracts for this meeting are available via the meeting website at https://www.hou.usra.edu/meetings/pgm2018/ Abstracts can be cited as Author A. B. and Author C. D. (2018) Title of abstract. In Planetary Geologic Mappers Annual Meeting, Abstract #XXXX. LPI Contribution No. 2066, Lunar and Planetary Institute, Houston. Guide to Sessions Tuesday, June 12, 2018 9:00 a.m. Strong Hall Meeting Room Introduction and Mercury and Venus Maps 1:00 p.m. Strong Hall Meeting Room Mars Maps 5:30 p.m. Strong Hall Poster Area Poster Session: 2018 Planetary Geologic Mappers Meeting Wednesday, June 13, 2018 8:30 a.m. Strong Hall Meeting Room GIS and Planetary Mapping Techniques and Lunar Maps 1:15 p.m. Strong Hall Meeting Room Asteroid, Dwarf Planet, and Outer Planet Satellite Maps Thursday, June 14, 2018 8:30 a.m. Strong Hall Optional Field Trip to Appalachian Mountains Program Tuesday, June 12, 2018 INTRODUCTION AND MERCURY AND VENUS MAPS 9:00 a.m. Strong Hall Meeting Room Chairs: David Williams Devon Burr 9:00 a.m. -

Discovering the Lost Race Story: Writing Science Fiction, Writing Temporality
Discovering the Lost Race Story: Writing Science Fiction, Writing Temporality This thesis is presented for the degree of Doctor of Philosophy of The University of Western Australia 2008 Karen Peta Hall Bachelor of Arts (Honours) Discipline of English and Cultural Studies School of Social and Cultural Studies ii Abstract Genres are constituted, implicitly and explicitly, through their construction of the past. Genres continually reconstitute themselves, as authors, producers and, most importantly, readers situate texts in relation to one another; each text implies a reader who will locate the text on a spectrum of previously developed generic characteristics. Though science fiction appears to be a genre concerned with the future, I argue that the persistent presence of lost race stories – where the contemporary world and groups of people thought to exist only in the past intersect – in science fiction demonstrates that the past is crucial in the operation of the genre. By tracing the origins and evolution of the lost race story from late nineteenth-century novels through the early twentieth-century American pulp science fiction magazines to novel-length narratives, and narrative series, at the end of the twentieth century, this thesis shows how the consistent presence, and varied uses, of lost race stories in science fiction complicates previous critical narratives of the history and definitions of science fiction. In examining the implicit and explicit aspects of temporality and genre, this thesis works through close readings of exemplar texts as well as historicist, structural and theoretically informed readings. It focuses particularly on women writers, thus extending previous accounts of women’s participation in science fiction and demonstrating that gender inflects constructions of authority, genre and temporality. -

Charon Tectonics
Icarus 287 (2017) 161–174 Contents lists available at ScienceDirect Icarus journal homepage: www.elsevier.com/locate/icarus Charon tectonics ∗ Ross A. Beyer a,b, , Francis Nimmo c, William B. McKinnon d, Jeffrey M. Moore b, Richard P. Binzel e, Jack W. Conrad c, Andy Cheng f, K. Ennico b, Tod R. Lauer g, C.B. Olkin h, Stuart Robbins h, Paul Schenk i, Kelsi Singer h, John R. Spencer h, S. Alan Stern h, H.A. Weaver f, L.A. Young h, Amanda M. Zangari h a Sagan Center at the SETI Institute, 189 Berndardo Ave, Mountain View, California 94043, USA b NASA Ames Research Center, Moffet Field, CA 94035-0 0 01, USA c University of California, Santa Cruz, CA 95064, USA d Washington University in St. Louis, St Louis, MO 63130-4899, USA e Massachusetts Institute of Technology, Cambridge, MA 02139, USA f Johns Hopkins University Applied Physics Laboratory, Laurel, MD 20723, USA g National Optical Astronomy Observatories, Tucson, AZ 85719, USA h Southwest Research Institute, Boulder, CO 80302, USA i Lunar and Planetary Institute, Houston, TX 77058, USA a r t i c l e i n f o a b s t r a c t Article history: New Horizons images of Pluto’s companion Charon show a variety of terrains that display extensional Received 14 April 2016 tectonic features, with relief surprising for this relatively small world. These features suggest a global ex- Revised 8 December 2016 tensional areal strain of order 1% early in Charon’s history. Such extension is consistent with the presence Accepted 12 December 2016 of an ancient global ocean, now frozen. -

WEATHER-PROOFING Poems by Sandra Schor
“Weather-Proofing” Shenandoah. Fall, 1974: 18-19. WEATHER-PROOFING Poems by Sandra Schor Acknowledgments Some of the poems in this manuscript have previously appeared in The Beloit Poetry Journal, The Centennial Review, Colorado Quarterly, Confrontation, Florida Quarterly, The Journal of Popular Film, The Little Magazine, Montana Gothic, Ploughshares, Prairie Schooner, Shenandoah, Southern Poetry Review. Table of Contents I Weather-Proofing A Priest’s Mind . 1 Weather-Proofing . 2 Riding the Earth . 3 Small Consolation . 4 To the Poet as a Young Traveler . 6 The Fact of the Darkness . 7 Outside, Where Films End . 9 On Revisiting Tintern Abbey . 10 The Coming of the Ice: A Sestina . 11 House at the Beach . 13 Postcard from a Daughter in Crete . 15 Spinoza and Dostoevsky Tell Me About My Cousins . 16 Looking for Monday . 17 On the Absence of Moths Underseas . 18 II The Practical Life The Practical Life . 19 Taking the News . 21 In the Best of Health . 22 In the Center of the Soup . 23 Masks . 24 They Who Never Tire . 25 Decorum . 26 After Babi Yar . 27 Death of the Short-Term Memory . 29 Open-Ended . 30 Joys and Desires . 31 Snow on the Louvre . 32 Night Ferry to Helsinki . 33 The Unicorn and the Sea . 35 III Hovering Hovering . 36 Gestorben in Zurich . 37 In the Church of the Frari . 39 Death of an Audio Engineer . 40 For Georgio Morandi . 42 Piano Recital from Second Row Center . 43 In the Shade of Asclepius . 44 The Accident of Recovery . 45 On a Dish from the Ch’ing Dynasty . 46 Swallows on the Moon . -

Collision Probabilities in the Edgeworth-Kuiper Belt
Draft version April 30, 2021 Typeset using LATEX default style in AASTeX63 Collision Probabilities in the Edgeworth-Kuiper belt Abedin Y. Abedin,1 JJ Kavelaars,1 Sarah Greenstreet,2, 3 Jean-Marc Petit,4 Brett Gladman,5 Samantha Lawler,6 Michele Bannister,7 Mike Alexandersen,8 Ying-Tung Chen,9 Stephen Gwyn,1 and Kathryn Volk10 1National Research Council of Canada, Herzberg Astronomy and Astrophysics, 5071 West Saanich Road, Victoria, BC V9E 2E7, Canada 2B612 Asteroid Institute, 20 Sunnyside Avenue, Suite 427, Mill Valley, CA 94941, USA 3DIRAC Center, Department of Astronomy, University of Washington, 3910 15th Avenue NE, Seattle, WA 98195, USA 4Institut UTINAM, CNRS-UMR 6213, Universit´eBourgogne Franche Comt´eBP 1615, 25010 Besan¸conCedex, France 5Department of Physics and Astronomy, 6224 Agricultural Road, University of British Columbia, Vancouver, British Columbia, Canada 6Campion College and the Department of Physics, University of Regina, Regina SK, S4S 0A2, Canada 7University of Canterbury, Christchurch, New Zealand 8Minor Planet Center, Smithsonian Astrophysical Observatory, 60 Garden Street, Cambridge, MA 02138, US 9Academia Sinica Institute of Astronomy and Astrophysics, Taiwan 10Lunar and Planetary Laboratory, University of Arizona: Tucson, AZ, USA Submitted to AJ ABSTRACT Here, we present results on the intrinsic collision probabilities, PI , and range of collision speeds, VI , as a function of the heliocentric distance, r, in the trans-Neptunian region. The collision speed is one of the parameters, that serves as a proxy to a collisional outcome e.g., complete disruption and scattering of fragments, or formation of crater, where both processes are directly related to the impact energy. We utilize an improved and de-biased model of the trans-Neptunian object (TNO) region from the \Outer Solar System Origins Survey" (OSSOS). -

Select Bibliography
Select Bibliography by the late F. Seymour-Smith Reference books and other standard sources of literary information; with a selection of national historical and critical surveys, excluding monographs on individual authors (other than series) and anthologies. Imprint: the place of publication other than London is stated, followed by the date of the last edition traced up to 1984. OUP- Oxford University Press, and includes depart mental Oxford imprints such as Clarendon Press and the London OUP. But Oxford books originating outside Britain, e.g. Australia, New York, are so indicated. CUP - Cambridge University Press. General and European (An enlarged and updated edition of Lexicon tkr WeltliU!-atur im 20 ]ahrhuntkrt. Infra.), rev. 1981. Baker, Ernest A: A Guilk to the B6st Fiction. Ford, Ford Madox: The March of LiU!-ature. Routledge, 1932, rev. 1940. Allen and Unwin, 1939. Beer, Johannes: Dn Romanfohrn. 14 vols. Frauwallner, E. and others (eds): Die Welt Stuttgart, Anton Hiersemann, 1950-69. LiU!-alur. 3 vols. Vienna, 1951-4. Supplement Benet, William Rose: The R6athr's Encyc/opludia. (A· F), 1968. Harrap, 1955. Freedman, Ralph: The Lyrical Novel: studies in Bompiani, Valentino: Di.cionario letU!-ario Hnmann Hesse, Andrl Gilk and Virginia Woolf Bompiani dille opn-e 6 tUi personaggi di tutti i Princeton; OUP, 1963. tnnpi 6 di tutu le let16ratur6. 9 vols (including Grigson, Geoffrey (ed.): The Concise Encyclopadia index vol.). Milan, Bompiani, 1947-50. Ap of Motkm World LiU!-ature. Hutchinson, 1970. pendic6. 2 vols. 1964-6. Hargreaves-Mawdsley, W .N .: Everyman's Dic Chambn's Biographical Dictionary. Chambers, tionary of European WriU!-s. -
Mysterious Mercury Bepicolumbo Heads for the World of Ice and Fire
A Digital Supplement to Astronomy Insights Astronomy Magazine © 2018 Kalmbach Media Mysterious Mercury BepiColumbo Heads for the World of Ice and Fire Dcember 2018 • Astronomy.com Voyage to a world Color explodes from Mercury’s surface in this enhanced-color mosaic taken through several filters. The yellow and orange hues signify relatively young plains likely formed when fluid lavas erupted from volcanoes. Medium- and dark-blue regions are older terrain, while the light-blue and white streaks represent fresh material excavated from relatively recent impacts. ALL IMAGES, UNLESS OTHERWISE NOTED: NASA/JHUAPL/CIW 2 ASTRONOMY INSIGHTS • DECEMBER 2018 A world of both fire and ice, Mercury excites and confounds scientists. The BepiColombo probe aims to make sense of this mysterious world. by Ben Evans of extremesWWW.ASTRONOMY.COM 3 Mercury is a land of contrasts. The solar system’s smallest planet boasts the largest core relative to its size. Temperatures at noon can soar as high as 800 degrees Fahrenheit (425 degrees Celsius) — hot enough to melt lead — but dip as low as –290 F (–180 C) before dawn. Mercury resides nearest the Sun, and it has the most eccentric orbit. At its closest, the planet lies only 29 mil- lion miles (46 million kilometers) from the Sun — less than one-third Earth’s distance — but swings out as far as 43 million miles (70 million km). Its rapid movement across our sky earned it a reputation among ancient skywatchers as the fleet-footed messenger of the gods: Italian scientist Giuseppe “Bepi” Colombo helped develop a technique for sending a space Hermes to the Greeks and Mercury to the Romans. -
“Vulcan Planum” Map Dark-Colored Ejecta Scale Maps
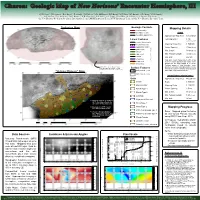
Charon: Geologic Map of New Horizons’ Encounter Hemisphere, III S.J. Robbins0,1, J.R. Spencer1, R.A. Beyer2,3, P. Schenk4, J.M. Moore3, W.B. McKinnon5, R.P. Binzel6, M.W. Buie1, B.J. Buratti7, A.F. Cheng8, W.M. Grundy9, I.R. Linscott10, H.J. Reitsema11, D.C. Reuter12, M.R. Showalter2, G.L. Tyler1, L.A. Young1, C.B. Olkin1, K. Ennico3, H.A. Weaver8, S.A. Stern1, the New Horizons Geology & Geophysics Investigation Team, LORRI Instrument Team, MVIC Instrument Team, and the New Horizons Encounter Team Tectonics Map Geologic Contacts Mapping Details map boundary boundary, certain Global boundary, approximate Approximate Map Area: 60% of disk* Linear Features Full Map Scale: 1:3M printed map 50” crest of buried crater crest of crater rim Mapping Scale (6×): 1:500,000 depression margin map colors used only in tectonics Vertex Spacing: 2.5 km (⅘ mm) graben trace Min. Crater: 30 km (1 cm) groove ridge crest Min. Feature Length: 15 km (½ cm) catena Min. Unit: 250 km2 scarp base *Map area covers images taken within a few scarp crest hours of closest approach and closely corre- broad warp sponds with the areas imaged at ≲1 km/px. Southern margin of “map boundary” corre- example of offset due to different versions sponds to terminator topography and is not fully of the basemap being used; all lines must Surface Features reflected in incidence / emission angle and pixel be redrafted to the same, most recent solution “Vulcan Planum” Map dark-colored ejecta scale maps. Area is ≈2,800,000 km2. -

Asteroids, Comets, Meteors -‐‑ ACM2017 -‐‑ Montevid
Asteroids, Comets, Meteors - ACM2017 - Montevideo THE GEOLOGY OF CHARON AS REVEALED BY NEW HORIZONS J. M. Moore1, J. R. Spencer2, W. B. McKinnon3, R. A. Beyer1,4, S.A. Stern2, K. Ennico1, C.B. Olkin2, H.A. Weaver5, L.A. Young2, and the New Horizons Science Team 1National Aeronautics and Space Administration (NASA) Ames Research Center, MS-245-3 Space 2 Sci. Division, Moffett Field, CA 94035, USA, Southwest Research Institute, Boulder, CO 80302, USA, 3Washington University, St. Louis, MO 63130, USA, 4SETI Institute, Mt. View, CA 94043, USA, 5Johns Hopkins University Applied Physics Laboratory, Laurel, MD 20723, USA. Introduction: Pluto’s large moon Charon (ra- Clarke Montes appears to expose a more rugged dius 606 km; r = 1.70 g cm-3) exhibits a striking terrain, with smooth plains embaying the mar- variety of landscapes. Charon can be divided gins, two of which are lobate. In addition to the into two broad provinces separated by a roughly moats surrounding these mountains, there are aligned assemblage of ridges and canyons, two additional depressions surrounded by which span from east to west. North of this tec- rounded or lobate margins. We speculate that tonic belt is rugged, cratered terrain (Oz Terra); both the moats and depressions may be the ex- south of it are smoother but geologically com- pressions of the flow of, and incomplete enclo- plex plains (Vulcan Planum). (All place names sure by, viscous, cryovolcanic materials, such as here are informal.) Relief exceeding 20 km is proposed at Ariel and Miranda [5, 6]. The seen in limb profiles and stereo topography. -

A White Paper on Pluto Follow on Missions: Background, Rationale
A White Paper on Pluto Follow On Missions: Background, Rationale, and New Mission Recommendations 2018 March 12 1 Signatories In Alphabetical Order: Caitlin Ahrens, Michelle T. Bannister, Tanguy Bertrand, Ross Beyer, Richard Binzel, Maitrayee Bose, Paul Byrne, Robert Chancia, Dale Cruikshank, Rajani Dhingra, Cynthia Dinwiddie, David Dunham, Alissa Earle, Christopher Glein, Cesare Grava, Will Grundy, Aurelie Guilbert, Doug Hamilton, Jason Hofgartner, Brian Holler, Mihaly Horanyi, Sona Hosseini, James Tuttle Keane, Akos Kereszturi, Eduard Kuznetsov, Rosaly Lopes, Renu Malhotra, Kathleen Mandt Jeff Moore, Cathy Olkin, Maurizio Pajola, Lynnae Quick, Stuart Robbins, 2 Gustavo Benedetti Rossi, Kirby Runyon, Pablo Santos Sanz, Paul Schenk Jennifer Scully, Kelsi Singer, Alan Stern, Timothy Stubbs, Mark Sykes, Laurence Trafton, Anne Verbiscer, Larry Wasserman, and Amanda Zangari 3 Executive Summary The exploration of the binary Pluto-Charon and its small satellites during the New Horizons flyby in 2015 revealed not only widespread geologic and compositional diversity across Pluto, but surprising complexity, a wide range of surface unit ages, evidence for widespread activity stretching across billion of years to the near-present, as well as numerous atmospheric puzzles, and strong atmospheric coupling with its surface. New Horizons also found an unexpected diversity of landforms on its binary companion, Charon. Pluto’s four small satellites yielded surprises as well, including their unexpected rapid and high obliquity rotation states, high albedos, and diverse densities. Here we briefly review the findings made by New Horizons and the case for a follow up mission to investigate the Pluto system in more detail. As the next step in the exploration of this spectacular planet-satellite system, we recommend an orbiter to study it in considerably more detail, with new types of instrumentation, and to observe its changes with time. -

Spaceflight a British Interplanetary Society Publication
SpaceFlight A British Interplanetary Society publication Volume 60 No.8 August 2018 £5.00 The perils of walking on the Moon 08> Charon Tim Peake 634072 Russia-Sino 770038 9 Space watches CONTENTS Features 14 To Russia with Love Philip Corneille describes how Russia fell in love with an iconic Omega timepiece first worn by NASA astronauts. 18 A glimpse of the Cosmos 14 Nicholas Da Costa shows us around the Letter from the Editor refurbished Cosmos Pavilion – the Moscow museum for Russian space achievements. In addition to the usual mix of reports, analyses and commentary 20 Deadly Dust on all space-related matters, I am The Editor looks back at results from the Apollo particularly pleased to re- Moon landings and asks whether we are turning introduce in this month’s issue our a blind eye to perils on the lunar surface. review of books. And to expand that coverage to all forms of 22 Mapping the outer limits media, study and entertainment be SpaceFlight examines the latest findings it in print, on video or in a concerning Charon, Pluto’s major satellite, using 18 computer game – so long as it’s data sent back by NASA's New Horizons. related to space – and to have this as a regular monthly contribution 27 Peake Viewing to the magazine. Rick Mulheirn comes face to face with Tim Specifically, it is gratifying to see a young generation stepping Peake’s Soyuz spacecraft and explains where up and contributing. In which this travelling display can be seen. regard, a warm welcome to the young Henry Philp for having 28 38th BIS Russia-Sino forum provided for us a serious analysis Brian Harvey and Ken MacTaggart sum up the of a space-related computer game latest Society meeting dedicated to Russian and which is (surprisingly, to this Chinese space activities. -

Features Named After 07/15/2015) and the 2018 IAU GA (Features Named Before 01/24/2018)
The following is a list of names of features that were approved between the 2015 Report to the IAU GA (features named after 07/15/2015) and the 2018 IAU GA (features named before 01/24/2018). Mercury (31) Craters (20) Akutagawa Ryunosuke; Japanese writer (1892-1927). Anguissola SofonisBa; Italian painter (1532-1625) Anyte Anyte of Tegea, Greek poet (early 3rd centrury BC). Bagryana Elisaveta; Bulgarian poet (1893-1991). Baranauskas Antanas; Lithuanian poet (1835-1902). Boznańska Olga; Polish painter (1865-1940). Brooks Gwendolyn; American poet and novelist (1917-2000). Burke Mary William EthelBert Appleton “Billieâ€; American performing artist (1884- 1970). Castiglione Giuseppe; Italian painter in the court of the Emperor of China (1688-1766). Driscoll Clara; American stained glass artist (1861-1944). Du Fu Tu Fu; Chinese poet (712-770). Heaney Seamus Justin; Irish poet and playwright (1939 - 2013). JoBim Antonio Carlos; Brazilian composer and musician (1927-1994). Kerouac Jack, American poet and author (1922-1969). Namatjira Albert; Australian Aboriginal artist, pioneer of contemporary Indigenous Australian art (1902-1959). Plath Sylvia; American poet (1932-1963). Sapkota Mahananda; Nepalese poet (1896-1977). Villa-LoBos Heitor; Brazilian composer (1887-1959). Vonnegut Kurt; American writer (1922-2007). Yamada Kosaku; Japanese composer and conductor (1886-1965). Planitiae (9) Apārangi Planitia Māori word for the planet Mercury. Lugus Planitia Gaulish equivalent of the Roman god Mercury. Mearcair Planitia Irish word for the planet Mercury. Otaared Planitia Arabic word for the planet Mercury. Papsukkal Planitia Akkadian messenger god. Sihtu Planitia Babylonian word for the planet Mercury. StilBon Planitia Ancient Greek word for the planet Mercury.