Intelligent Alternator Controller: Prototype and Testing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
MGB Alternator Conversion Installation Instructions for MGA & 1962 to 1967 MGB PART# 130-078, 130-088, 130-098 440 Rutherford St
MGB Alternator Conversion Installation Instructions For MGA & 1962 to 1967 MGB PART# 130-078, 130-088, 130-098 440 Rutherford St. Goleta, CA 93117 1-800-642-8295 • FAX 805-692-2525 • www.MossMotors.com Scan the code to watch Moss's Generator to Alternator Conversion Video Or search “Moss TV generator to alternator conversion” on YouTube. Tools required: Vehicle Preparation: Positive Ground to Negative Ground Conversion • Small and medium flat blade screwdriver 1. Remove the battery cover behind the seats using a • Phillips head screwdriver screwdriver to release the dzus fasteners. Disconnect and remove the battery, or both batteries if still • 11/32" wrench, 7/16" wrench, 1/2" wrench, configured for a dual 6 volt set up, using a 1/2" 5/8" wrench wrench. • 7/16" socket with extension, 1/2" socket, 5/8" socket, 22mm socket 2. Disconnect the Yellow/Green and Yellow wires from the generator. If the generator uses ring type • Center punch connectors use a 5/16" and 7/16" wrench. • Hammer 3. For the installation of the Lucas alternator the ignition • 1/4" drill bit, electric drill coil will have to be relocated to the engine bay side • Deadblow hammer of the right fender well. Remove the coil from the generator using a 7/16" socket. Locate a new place • Air impact gun for the coil and mark the hole locations. Using a • Pry bar center punch and hammer, make two dimples at the center of the marks to insure that the drill bit will not • Wire cutters walk around when the holes are being started. -

Leburg Electronic Ignition System EI10A Installation Manual
Leburg Electronic Ignition System EI10A Installation Manual For Aero VW’s - Or Any 2 Or 4 Cylinder 4 Stroke Engine Skycraft Ltd Telephone: 01406 540777 Riverside House Bloodfold Farm Website: www.skycraft.ltd Ravens Bank Saturday Bridge Email: [email protected] Holbeach Lincolnshire Facebook: @skycraftlimited PE12 8SR © Skycraft Ltd 2013 Leburg EI10A Manual—July 2020 Page 1 Contents 1. Read This First 2. The VW As An Aero Engine 3. Ignition System Performance 4. Principles Of Operation 5. Set Up 6. Power Supplies 7. Fitting A Honda CBR 600 Alternator 8. Manufacture & Assembly Notes 9. Wiring Notes 10. Wiring Up The Spark Plugs 11. Drawings © Skycraft Ltd 2013 Leburg EI10A Manual—July 2020 Page 2 1. Read This First By virtue of the techniques, design, components used and the care taken in building and testing, each ignition controller is believed to be highly reliable. The risk of failure is thus low, but it is finite. Therefore, this system is only made available on the basis that the user agrees to implement a Dual Ignition System. The Leburg system is the dual system, with the power supply system described in this manual. If any change from this is intended, you will need to check with the LAA that they will accept it. If a different alternator or power system is used, again, you will need to check with the LAA that they will accept it. The benefits of smooth running and getting the maximum power are obtained when the system is installed as described in this manual, with dual controllers, dual ignition spark plugs, both firing at the same time at the optimum advance angle. -

Before Endine Start
C-A152 CESSNA – NORMAL PROCEDURES BEFORE ENGINE START THROUGH ENGINE SHUTDOWN – CHECKLIST WILL BE VERBALIZED BEFORE ENGINE START WINDOWS ..................................................................................................................... SECURE CABIN DOORS ............................................................................................................. CLOSED TACH TIME ................................................................................... CHECK TIME REMAINING HOBBS TIME ................................................................................................................ RECORD BEFORE TAKE-OFF BRAKES ....................................................................................... APPLY TOE BRAKES ONLY TYPE OF TAKEOFF .............................................................................................. DETERMINE PASSENGER BRIEF ................................................................................................ COMPLETE FLAPS .................................................................................................................. AS REQUIRED SEATBELTS AND HARNESSES .........................................................FASTEN AND SECURE AIRSPEEDS: ROTATION, CLIMB OUT, CABIN DOOR ......................................................................................... CLOSE AND SECURE AND BEST GLIDE ................................................................... CALCULATE (GUST SPREAD) PRE-TAKEOFF BRIEFING ..................................................................................... -
Starters & Alternators
Starters & Alternators Technical Manual www.denso-am.eu n UK & IE n RU n DACH n Eastern Europe n Export n Iberia, France, Italy DENSO Europe B.V. After Market and Industrial Solutions Business Unit Sales Representation European Headquarters Albania Hungary Portugal Weesp, Netherlands Austria Ireland Romania Belarus Israel Russia (Moscow) Belgium Italy Russia (Novosibirsk) Distribution warehouses Bosnia and Herzegovina Kaliningrad Slovakia Bulgaria Kazakhstan Slovenia Gennevilliers, France Cyprus Latvia Spain Leipzig, Germany Czech Republic Lithuania Sweden Madrid, Spain Denmark Luxembourg Switzerland Milton Keynes, UK Estonia Macedonia Turkey Moscow, Russia Finland Moldova United Kingdom Polrino, Italy France Montenegro Ukraine Weesp, Netherlands Georgia Netherlands Germany Norway Greece Poland DENSO Starters & Alternators Table of Content DENSO in Europe > The Aftermarket Originals 04 Introduction > About This Publication 04 > Product Range 05 PART 1 – DENSO Starters PART 2 – DENSO Alternators Characteristics Characteristics > System outline 08 > System outline 42 > How Starters work 09 > How Alternators work 43 Types Types > Pinion Shift Type 11 > Conventional Type 45 > Reduction Type 14 > Type III 46 > Planetary Type 17 > SC Type 47 Wall Chart 21 Wall Chart 53 Stop & Start Technology 22 Replacement Guide 54 Replacement Guide 28 Troubleshooting > Diagnostic Chart 55 Troubleshooting > Inspection 56 > Diagnostic Chart 29 > Q&A 58 > Inspection 30 > Q&A 37 Edition: 1, date of publication: August 2016 All rights reserved by DENSO EUROPE B.V. This document may not be reproduced or copied, in Edition: 2, date of publication: October 2016 whole or in part, without the written permission of the publisher. DENSO EUROPE B.V. reserves Editorial dept, staff: DNEU AMIS Technical Service, K. -

ROBINSON MODEL R44 II ROBINSON MODEL R44 II SECTION 3 EMERGENCY PROCEDURES FAA APPROVED: 11 MAY 2020 3-I SECTION 3 EMERGENCY PR
ROBINSON SECTION 3 MODEL R44 II EMERGENCY PROCEDURES SECTION 3 EMERGENCY PROCEDURES CONTENTS Page Definitions . 3-1 Power Failure – General . 3-1 Power Failure Above 500 Feet AGL . 3-2 Power Failure Between 8 Feet and 500 Feet AGL . 3-2 Power Failure Below 8 Feet AGL . 3-3 Maximum Glide Distance Configuration . 3-3 Minimum Rate of Descent Configuration . 3-3 Air Restart Procedure . 3-3 Emergency Water Landing – Power Off . 3-4 Emergency Water Landing – Power On . 3-4 Loss of Tail Rotor Thrust in Forward Flight . 3-5 Loss of Tail Rotor Thrust in Hover . 3-5 Headset Audio Failure . 3-5 Engine Fire During Start on Ground . 3-6 Engine Fire in Flight . 3-6 Electrical Fire in Flight . 3-6 Tachometer Failure . 3-7 Hydraulic System Failure . 3-7 Governor Failure . 3-7 Warning/Caution Lights . 3-8 Audio Alerts . 3-11 FAA APPROVED: 11 MAY 2020 3-i INTENTIONALLY BLANK ROBINSON SECTION 3 MODEL R44 II EMERGENCY PROCEDURES SECTION 3 EMERGENCY PROCEDURES DEFINITIONS Land Immediately – Land on the nearest clear area where a safe normal landing can be performed. Be prepared to enter autorotation during approach, if required. Land as soon as practical – Landing site is at pilot’s discretion based on nature of problem and available landing areas. Flight beyond nearest airport is not recommended. POWER FAILURE – GENERAL A power failure may be caused by either an engine or drive system failure and will usually be indicated by the low RPM horn. An engine failure may be indicated by a change in noise level, nose left yaw, an oil pressure light, or decreasing engine RPM. -

Altronic® Ignition Systems for Industrial Engines
Ignition Systems for Industrial Engines Altronic Ignition Systems CONTENTS Altronic Ignition Systems Overview and Guide Contents and Introduction ................................................................................ 2 Engine Application Guide ................................................................................. 3 Solid-State/Mechanical Ignition Systems Theory and Overview ........................................................................................ 4 Altronic I, II, III, and V ..................................................................................... 5 Disc-Triggered Digital Ignition Systems Theory and Overview ........................................................................................ 6 CD1, CD200, DISN ......................................................................................... 7 Crankshaft-Referenced Digital Ignition Systems Theory and Overview ........................................................................................ 8 CPU-95, CPU-2000 ......................................................................................... 9 Crankshaft-Referenced, Directed Energy Digital Ignition Systems CPU-XL VariSpark .......................................................................................... 10 Ignition Coils ................................................................................................... 12 Conversion Kits for Caterpillar Engines ......................................................... 14 Flashguard® Spark Plugs & Secondary -
Digital Ignition ZDG3 Instruction Manual Digital Ignition ZDG3 and Alternator System for LAVERDA 1000/180° (Series I
--- Digital Ignition ZDG3 Instruction manual digital ignition ZDG3 and alternator system for LAVERDA 1000/180° (Series I - HKZ and BTZ) 1. Function 2. Fitting 3. Electrical connection 4. Adjustments 5. General Volker Sachse • Lerchenweg 12 • D32312 Instruction manual digital ignition ZDG3 and charging system for Laverda 1000-180° (Series I - Bosch BTZ and HKZ) 1. Function - 2. Fitting - 3. Electrical connection - 4.Adjustment - 5. General The digital ignition ZDG3 and the alternator system replaces all parts of the old ignition and charging system. With 320W a powerful charging is guaranteed. Function: per revolution of the crankshaft starting from TDC, the momentary peripheral speed is determined and by this means, the time up to ignition is calculated. Because the peripheral speed varies substantially during acceleration, this long measurement is selected in order to determine a relatively exact measurement. The following computation of ignition timing is divided into 4 ranges: 1. 0-400 rpm Starting range, ignition always at TDC 2. 400-1000 rpm Idling range, 2° to 8 ° advanced ignition, depending on curve selection 3. 1000-6200 rpm Partial load range, the spark advance adjustment occurs here maximum load range, constant 32° - 39° advanced ignition, depending 6200-10000 rpm 4. on curve selection ignition box, alternator system and regulator The measurement occurs by magnetic sensitive electronic devices (Hall effect sensors) which have a high temperature compatibility. If the engine stops, the ignition current will be switched off after 3 sec. to protect the ignition coils. 9 ignition curves are available click to e Instruction manual digital ignition ZDG3 and charging system for Laverda 1000-180° (Series I - Bosch BTZ and HKZ) 1. -
S.I. Engine Idle Control Improvement by Using Automobile Reversible Alternator
CwftS'LAAS— 953 (o 6 CENTRE NATIONAL DE LA RECHERCHE SCIENTIFIQUE LABORATOIRE DANALYSE ET ©’ARCHITECTURE DBS SYSTEMES S.L ENGINE IDLE CONTROL IMPROVEMENT BY USING AUTOMOBILE REVERSIBLE "ALTERNATOR” L. KOUADIO, P. BID AN, M. VALENTIN, J.P. BERRY LAAS REPORT 95268 JUNE 1995 DISTRIBUTION OF THIS DOCUMENT IS INJURED FOREIGN SALS PROHIBITS) ftn 6& LIMITED DISTRIBUTION NOTICE This report has been submitted for publication outside of CNRS It has been issued as a Research Report for early peer distribution DISCLAIMER Portions of this document may be illegible in electronic image products. Images are produced from the best available original document S.I. ENGINE IDLE CONTROL IMPROVEMENT BY USING AUTOMOBILE REVERSIBLE “ALTERNATOR” L.K. Kouadio, P. Bidan, M. Valentin, J.P. Berry L.A.A.S./C.N.R.S., 7 Avenue du Colonel ROCHE, 31077 Toulouse Cedex FRAACF. Phone: (33) 61.33-64-17; Fax: (33) 61.55.35.77; e-mail: [email protected] Abstract. This paper describes an original method for engine idle improve ment. It is well known that inappropriate idle-speed control increases fuel consumption, pollutant emissions and also reduces the idle quality. To prevent engine stalling and improve its performance during idling it is proposed a strategy based on two control loops such as that of the tra ditional air-flow ratio and an other providing an external supplementary torque via the automobile’s reversible “alternator”. Hence engine stalling is prevented due to the faster torque response and secondly Fuel/Air ratio is easily controllable due to the slow variation of the intake air-flow. -
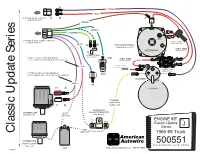
C Lassic U Pdate Series
B PURPLE RED to mating starter connector C B A on dash harness BROWN s GREEN e LT GREEN i BAT r to mating firewall engine connector ALTERNATOR BOOT on dash harness (FROM 510476 KIT) BLUE (MEGA-FUSES, RING TERMINALS, A ALTERNATOR BOOT AND SHRINK e A TUBING FOUND IN 510476 KIT) 6 GA. RED ALTERNATOR (FROM 510476 KIT) S K ALTERNATE TEMP (w/ cold light) to BAT location on HEI distributors RED LITTLEFUSE 6 GA. RED MEGA shrink tube -or see distributor manufacturer's instructions (FROM 510476 KIT) RED shrink tube 175A e LITTLEFUSE MEGA shrink tube t 175A (Battery cable to shrink tube PINK battery, not supplied) (BUSSBAR JUMPER a FROM 510476 KIT) to TACH location on HEI distributor TEMP -or to negative side coil on most other ignitions R S d SOLENOID p WHITE OIL H A STARTER U YELLOW c (optional for i F B points only) s ALTERNATE DISTRIBUTOR BALLAST RESISTOR WHITE (see sheet 2) s (internal coil) (alternate) 12V ENGINE KIT bag a IN OUT l Classic Update J Series PINK C (alternate) 1960-66 Truck DISTRIBUTOR (external, points 500551 type, coil) 92965467 instruction rev 2.0 7/20/2018 COIL www.americanautowire.com 856-933-0801 sheet 1 LOOSE PIECE WIRES PURPLE Starter solenoid feed Connect this to the "s" terminal on the starter solenoid. Route the other end to the dash harness starter connector and trim to length. Install terminal B and connector C, maintaining color continuity with the mating connector. RED Main power feed Use the Megafuse, ring terminal, and shrink tubing from the 510476 kit. -

Intelligent Alternator Control Strategy Development for Hybrid Automotive Applications
Mississippi State University Scholars Junction Theses and Dissertations Theses and Dissertations 1-1-2008 Intelligent Alternator Control Strategy Development For Hybrid Automotive Applications Stephen Gordon Phillips Follow this and additional works at: https://scholarsjunction.msstate.edu/td Recommended Citation Phillips, Stephen Gordon, "Intelligent Alternator Control Strategy Development For Hybrid Automotive Applications" (2008). Theses and Dissertations. 2770. https://scholarsjunction.msstate.edu/td/2770 This Graduate Thesis - Open Access is brought to you for free and open access by the Theses and Dissertations at Scholars Junction. It has been accepted for inclusion in Theses and Dissertations by an authorized administrator of Scholars Junction. For more information, please contact [email protected]. INTELLIGENT ALTERNATOR CONTROL STRATEGY DEVELOPMENT FOR HYBRID AUTOMOTIVE APPLICATIONS By Stephen Gordon Phillips A Thesis Submitted to the Faculty of Mississippi State University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Electrical Engineering in the Department of Electrical and Computer Engineering Mississippi State, Mississippi December 2008 Copyright by Stephen Gordon Phillips 2008 INTELLIGENT ALTERNATOR CONTROL STRATEGY DEVELOPMENT FOR HYBRID AUTOMOTIVE APPLICATIONS By Stephen Gordon Phillips Approved: _________________________________ _________________________________ G. Marshall Molen Herbert L. Ginn, III Diversified Technology - Ergon Assistant Professor of Electrical and -
![4JH45 Common Rail Series Rail Common 4JH45 Marine Diesel Engines Bso Ii Ii Bso [471 Lbs] In] X3.54 in [3.46 [134 In] Cu Rpm] Mhp@3000 [45 EMC](https://docslib.b-cdn.net/cover/6601/4jh45-common-rail-series-rail-common-4jh45-marine-diesel-engines-bso-ii-ii-bso-471-lbs-in-x3-54-in-3-46-134-in-cu-rpm-mhp-3000-45-emc-1226601.webp)
4JH45 Common Rail Series Rail Common 4JH45 Marine Diesel Engines Bso Ii Ii Bso [471 Lbs] In] X3.54 in [3.46 [134 In] Cu Rpm] Mhp@3000 [45 EMC
MARINE DIESEL ENGINES 4JH45 Common Rail Series Confi guration 4-stroke, vertical, water-cooled diesel engine Maximum output at crankshaft * 33.1 kW@3000 rpm [45 mhp@3000 rpm] Displacement 2.19 ltr [134 cu in] Bore x stroke 88 mm x 90 mm [3.46 in x 3.54 in] Cylinders 4 in line Combustion system Direct injection with common rail system Aspiration Natural aspiration Starting system Electric starting 12V - 1.4 kW Alternator 12V - 125A Cooling system Fresh water cooling by centrifugal water pump and rubber impeller sea water pump Lubrication system Enclosed, forced lubricating system Direction of rotation [crankshaft] Counterclockwise viewed from fl ywheel side Dry weight without gear 214 kg [471 lbs] Environmental EU: RCD BSO II EMC US: EPA Tier 3 Engine mounting Rubber type fl exible mounting NOTE: Fuel condition: Density at 15°C = 0.84 g/cm3: 1 kW = 1.3596 mhp = 1.3410 HP * Fuel temperature 40°C at the inlet of the fuel injection pump [ISO 8665: 2006] Technical data is according to ISO 8665: 2006 DIMENSIONS Rear view Right side view 4JH45 with KM35P marine gear www.yanmar.eu EN_DS4JH45_0614 MARINE DIESEL ENGINES PERFORMAnce CURVES Max. Output at Crankshaft Torque at Crankshaft Fuel Consumption at Prop. load exp. 3.0 40 140 12 35 120 10 30 40 100 8 25 80 20 6 Engine Speed, rpm 60 15 20 Torque, Nm Torque, 4 Output Power, kW Output Power, Output Power, mhp Output Power, 40 10 l/hr Fuel Consumption, 2 5 20 0 0 0 0 600 800 1000 1200 1400 1600 1800 2000 2200 2400 2600 2800 3000 3200 600 800 1000 1200 1400 1600 1800 2000 2200 2400 2600 2800 3000 -
For Starters and Alternators Table of Contents
Diagnostic Procedures Manual For Starters and Alternators Table of Contents Section Page I ) Introduction and Description 1–1. Introduction 1 1–7. Description 1 1–12. Electrical Fundamentals 2 II ) Diagnosis Charts 2–1. Overcharge Symptoms 8 2–2. Undercharge Symptoms 9 2–3. Milled Pinion Symptoms 10 III ) Testing 3–1. Testing Freedom Batteries 11 3–4. Testing Conventional Batteries 11 3–5. Test Procedure 12 3–7. Battery Cable Test with Single-Battery Location 12 3–10. Battery Cable Test with Dual-Battery Locations 14 3–13. Starter Solenoid Circuit Test 14 3–18. Magnetic Switch Circuit Test 16 3–21. Starter Replacement Determination 17 3–26. Alternator Wiring Test 18 3–29. Alternator Replacement Determination 19 3–33. Completion of All Tests 20 IV ) Summary V ) Appendix 5–1. Smart IMS or SIMS Diagnostic Steps 22 5-2. Overcrank Protection (OCP) Circuit Check 23 5-3. Multi-Battery Charging with Series and Parallel Chargers 23 5-4. Group Charging on Current-Limiting or Series Chargers 24 5-5. Group Charging on Voltage-Limiting or Parallel Chargers 24 5-6. Heavy Duty Diagnostics Procedures Data 25 SECTION 1 Introduction and Description 1-1. INTRODUCTION 1-5. For educational purposes, study of this entire manual is recommended. For diagnostic purposes, the flow charts in Section 1-2. PURPOSE. This manual provides diagnostic procedures that II will reference appropriate procedures for specific symptoms. can be used for troubleshooting a heavy duty electrical system, including the starting and charging systems. Some procedures 1-6. EQUIPMENT REQUIRED. To perform the tests specified in also may be used for preventative maintenance checks.