ECE 255, MOSFET Small Signal Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Role of Mosfets Transconductance Parameters and Threshold Voltage in CMOS Inverter Behavior in DC Mode
Preprints (www.preprints.org) | NOT PEER-REVIEWED | Posted: 28 July 2017 doi:10.20944/preprints201707.0084.v1 Article Role of MOSFETs Transconductance Parameters and Threshold Voltage in CMOS Inverter Behavior in DC Mode Milaim Zabeli1, Nebi Caka2, Myzafere Limani2 and Qamil Kabashi1,* 1 Department of Engineering Informatics, Faculty of Mechanical and Computer Engineering ([email protected]) 2 Department of Electronics, Faculty of Electrical and Computer Engineering ([email protected], [email protected]) * Correspondence: [email protected]; Tel.: +377-44-244-630 Abstract: The objective of this paper is to research the impact of electrical and physical parameters that characterize the complementary MOSFET transistors (NMOS and PMOS transistors) in the CMOS inverter for static mode of operation. In addition to this, the paper also aims at exploring the directives that are to be followed during the design phase of the CMOS inverters that enable designers to design the CMOS inverters with the best possible performance, depending on operation conditions. The CMOS inverter designed with the best possible features also enables the designing of the CMOS logic circuits with the best possible performance, according to the operation conditions and designers’ requirements. Keywords: CMOS inverter; NMOS transistor; PMOS transistor; voltage transfer characteristic (VTC), threshold voltage; voltage critical value; noise margins; NMOS transconductance parameter; PMOS transconductance parameter 1. Introduction CMOS logic circuits represent the family of logic circuits which are the most popular technology for the implementation of digital circuits, or digital systems. The small dimensions, low power of dissipation and ease of fabrication enable extremely high levels of integration (or circuits packing densities) in digital systems [1-5]. -
Junction Field Effect Transistor (JFET)
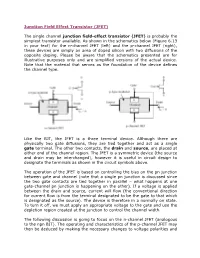
Junction Field Effect Transistor (JFET) The single channel junction field-effect transistor (JFET) is probably the simplest transistor available. As shown in the schematics below (Figure 6.13 in your text) for the n-channel JFET (left) and the p-channel JFET (right), these devices are simply an area of doped silicon with two diffusions of the opposite doping. Please be aware that the schematics presented are for illustrative purposes only and are simplified versions of the actual device. Note that the material that serves as the foundation of the device defines the channel type. Like the BJT, the JFET is a three terminal device. Although there are physically two gate diffusions, they are tied together and act as a single gate terminal. The other two contacts, the drain and source, are placed at either end of the channel region. The JFET is a symmetric device (the source and drain may be interchanged), however it is useful in circuit design to designate the terminals as shown in the circuit symbols above. The operation of the JFET is based on controlling the bias on the pn junction between gate and channel (note that a single pn junction is discussed since the two gate contacts are tied together in parallel – what happens at one gate-channel pn junction is happening on the other). If a voltage is applied between the drain and source, current will flow (the conventional direction for current flow is from the terminal designated to be the gate to that which is designated as the source). The device is therefore in a normally on state. -

Design of Cascode-Based Transconductance Amplifiers With
Design of Cascode-Based Transconductance Amplifiers with Low-Gain PVT Variability and Gain Enhancement Using a Body-Biasing Technique Nuno Pereira, Luis Oliveira, João Goes To cite this version: Nuno Pereira, Luis Oliveira, João Goes. Design of Cascode-Based Transconductance Amplifiers with Low-Gain PVT Variability and Gain Enhancement Using a Body-Biasing Technique. 4th Doctoral Conference on Computing, Electrical and Industrial Systems (DoCEIS), Apr 2013, Costa de Caparica, Portugal. pp.590-599, 10.1007/978-3-642-37291-9_64. hal-01348806 HAL Id: hal-01348806 https://hal.archives-ouvertes.fr/hal-01348806 Submitted on 25 Jul 2016 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Distributed under a Creative Commons Attribution| 4.0 International License Design of Cascode-based Transconductance Amplifiers with Low-gain PVT Variability and Gain Enhancement Using a Body-biasing Technique Nuno Pereira 2, Luis B. Oliveira 1,2 and João Goes 1,2 1 Centre for Technologies and Systems (CTS) – UNINOVA 2 Dept. of Electrical Engineering (DEE), Universidade Nova de Lisboa (UNL) Campus FCT/UNL, 2829-516, Caparica, Portugal [email protected], [email protected], [email protected] Abstract. -

Analog Integrated Current Drivers for Bioimpedance Applications: a Review
sensors Review Analog Integrated Current Drivers for Bioimpedance Applications: A Review Nazanin Neshatvar * , Peter Langlois, Richard Bayford and Andreas Demosthenous Department of Electronic and Electrical Engineering, University College London, Torrington Place, London WC1E 7JE, UK; [email protected] (P.L.); [email protected] (R.B.); [email protected] (A.D.) * Correspondence: [email protected] Received: 17 January 2019; Accepted: 4 February 2019; Published: 13 February 2019 Abstract: An important component in bioimpedance measurements is the current driver, which can operate over a wide range of impedance and frequency. This paper provides a review of integrated circuit analog current drivers which have been developed in the last 10 years. Important features for current drivers are high output impedance, low phase delay, and low harmonic distortion. In this paper, the analog current drivers are grouped into two categories based on open loop or closed loop designs. The characteristics of each design are identified. Keywords: bioimpedance measurement; current driver; integrated circuit; linear feedback; nonlinear feedback; transconductance 1. Introduction Bioimpedance measurement is defined as the study of biological tissue/cell in response to an alternating electric field, which can cover a frequency range from tens of Hz to several MHz [1,2]. The electrical properties of tissue/cell (conductive and dielectric properties) are characterized by frequency variable complex electrical bioimpedance providing important information about the tissue/cell physiology and pathology. In order to measure the bioimpedance, a current stimulus is required to be provided through a set of electrodes and measuring the corresponding potential via the same, or another, pair of electrodes. -
Channel Length Modulation • I Have Been Saying That for a MOSFET in Saturation, the Drain Current Is Independent of the Drain-To-Source Voltage 푉퐷푆 I.E
ECE315 / ECE515 Lecture-2 Date: 06.08.2015 • NMOS I/V Characteristics • Discussion on I/V Characteristics • MOSFET – Second Order Effect ECE315 / ECE515 NMOS I-V Characteristics Gradual Channel Approximation: Cut-off → Linear/Triode → Pinch-off/Saturation Assumptions: • VSB = 0 • VT is constant along the channel • 퐸푥 dominates 퐸푦 => need to consider current flow only in the 푥 −direction • Cutoff Mode: ퟎ ≤ 푽푮푺 ≤ 푽푻 IDS(cutoff) =0 This relationship is very simple—if the MOSFET is in cutoff, the drain current is simply zero ! ECE315 / ECE515 Linear Mode: 푽푮푺 ≥ 푽푻, ퟎ ≤ 푽푫푺 ≤ 푽푫(푺푨푻) => 푽푫푺 ≤ 푽푮푺 − 푽푻 • The channel reaches the drain. Gate VS=0 VDS<VDSAT VGS>VT Oxide Source Drain (p+) (p+) n+ n+ y Channel x x=0 x=L Substrate (p-Si) Depletion region VB=0 • 푉푐(푥): Channel voltage with respect to the source at position 푥. • Boundary Conditions: 푉푐 푥 = 0 = 푉푆 = 0; 푉푐 푥 = 퐿 = 푉퐷푆 ECE315 / ECE515 Linear Mode (Contd.) 푄푑: the charge density along the direction of current = W퐶표푥[푉퐺푆 − 푉푇] where, W = width of the channel and WCox is the capacitance per unit length yd Drain end dx Channel Source end • Now, since the channel potential varies from 0 at source to VDS at the drain 푄푑 푥 = 푊퐶표푥 푉퐺푆 − 푉푐(푥) − 푉푇 , where, Vc(x) = channel potential at 푥. • Subsequently we can write: 퐼퐷 푥 = 푄푑 푥 . 푣 , where, 푣 = velocity of charge (m/s) ECE315 / ECE515 Linear Mode (Contd.) 푣 = 휇푛퐸 ; where, 휇푛 = mobility of charge carriers (electron) dV E = electric field in the channel given by: Ex () dx dV Therefore, I()() x WC V V x V D ox GS c T n dx • Applying the boundary conditions for 푉푐(푥) we can write: xL VV DS IxI().(). -
Lecture 10 MOSFET (III) MOSFET Equivalent Circuit Models
Lecture 10 MOSFET (III) MOSFET Equivalent Circuit Models Outline • Low-frequency small-signal equivalent circuit model • High-frequency small-signal equivalent circuit model Reading Assignment: Howe and Sodini; Chapter 4, Sections 4.5-4.6 Announcements: 1.Quiz#1: March 14, 7:30-9:30PM, Walker Memorial; covers Lectures #1-9; open book; must have calculator • No Recitation on Wednesday, March 14: instructors or TA’s available in their offices during recitation times 6.012 Spring 2007 Lecture 10 1 Large Signal Model for NMOS Transistor Regimes of operation: VDSsat=VGS-VT ID linear saturation ID V DS VGS V GS VBS VGS=VT 0 0 cutoff VDS • Cut-off I D = 0 • Linear / Triode: W V I = µ C ⎡ V − DS − V ⎤ • V D L n ox⎣ GS 2 T ⎦ DS • Saturation W 2 I = I = µ C []V − V •[1 + λV ] D Dsat 2L n ox GS T DS Effect of back bias VT(VBS ) = VTo + γ [ −2φp − VBS −−2φp ] 6.012 Spring 2007 Lecture 10 2 Small-signal device modeling In many applications, we are only interested in the response of the device to a small-signal applied on top of a bias. ID+id + v - ds + VDS v + v gs - - bs VGS VBS Key Points: • Small-signal is small – ⇒ response of non-linear components becomes linear • Since response is linear, lots of linear circuit techniques such as superposition can be used to determine the circuit response. • Notation: iD = ID + id ---Total = DC + Small Signal 6.012 Spring 2007 Lecture 10 3 Mathematically: iD(VGS, VDS , VBS; vgs, vds , vbs ) ≈ ID()VGS , VDS ,VBS + id (vgs, vds, vbs ) With id linear on small-signal drives: id = gmvgs + govds + gmbvbs Define: gm ≡ transconductance [S] go ≡ output or drain conductance [S] gmb ≡ backgate transconductance [S] Approach to computing gm, go, and gmb. -

Power MOSFET Basics by Vrej Barkhordarian, International Rectifier, El Segundo, Ca
Power MOSFET Basics By Vrej Barkhordarian, International Rectifier, El Segundo, Ca. Breakdown Voltage......................................... 5 On-resistance.................................................. 6 Transconductance............................................ 6 Threshold Voltage........................................... 7 Diode Forward Voltage.................................. 7 Power Dissipation........................................... 7 Dynamic Characteristics................................ 8 Gate Charge.................................................... 10 dV/dt Capability............................................... 11 www.irf.com Power MOSFET Basics Vrej Barkhordarian, International Rectifier, El Segundo, Ca. Discrete power MOSFETs Source Field Gate Gate Drain employ semiconductor Contact Oxide Oxide Metallization Contact processing techniques that are similar to those of today's VLSI circuits, although the device geometry, voltage and current n* Drain levels are significantly different n* Source t from the design used in VLSI ox devices. The metal oxide semiconductor field effect p-Substrate transistor (MOSFET) is based on the original field-effect Channel l transistor introduced in the 70s. Figure 1 shows the device schematic, transfer (a) characteristics and device symbol for a MOSFET. The ID invention of the power MOSFET was partly driven by the limitations of bipolar power junction transistors (BJTs) which, until recently, was the device of choice in power electronics applications. 0 0 V V Although it is not possible to T GS define absolutely the operating (b) boundaries of a power device, we will loosely refer to the I power device as any device D that can switch at least 1A. D The bipolar power transistor is a current controlled device. A SB (Channel or Substrate) large base drive current as G high as one-fifth of the collector current is required to S keep the device in the ON (c) state. Figure 1. Power MOSFET (a) Schematic, (b) Transfer Characteristics, (c) Also, higher reverse base drive Device Symbol. -

Transconductance 1 Transconductance
Transconductance 1 Transconductance Transconductance is the property of certain electronic components. Conductance is the reciprocal of resistance; transconductance is the ratio of the current change at the output port to the voltage change at the input port. It is written as g . For direct current, transconductance is defined as follows: m For small signal alternating current, the definition is simpler: Terminology Transconductance is a contraction of transfer conductance. The old unit of conductance, the mho (ohm spelled backwards), was replaced by the SI unit, the siemens, with the symbol S (1 siemens = 1 ampere per volt). Transresistance Transresistance, infrequently referred to as mutual resistance, is the dual of transconductance. The term is a contraction of transfer resistance. It refers to the ratio between a change of the voltage at two output points and a related change of current through two input points, and is notated as r : m The SI unit for transresistance is simply the ohm, as in resistance. Devices Vacuum tubes For vacuum tubes, transconductance is defined as the change in the plate(anode)/cathode current divided by the corresponding change in the grid/cathode voltage, with a constant plate(anode)/cathode voltage. Typical values of g m for a small-signal vacuum tube are 1 to 10 millisiemens. It is one of the three 'constants' of a vacuum tube, the other two being its gain μ and plate resistance r or r . The Van der Bijl equation defines their relation as follows: p a [1] Transconductance 2 Field effect transistors Similarly, in field effect transistors, and MOSFETs in particular, transconductance is the change in the drain current divided by the small change in the gate/source voltage with a constant drain/source voltage. -

Chapter 4: the MOS Transistor
Chapter 4: the MOS transistor 1. Introduction First products in Complementary Metal Oxide Silicon (CMOS) technology appeared in the market in seventies. At the beginning, CMOS devices were reserved for logic, as they offer the highest density (in gates/mm2), and the lowest static power consumption. Most high‐frequency circuitry was carried out in bipolar technology. As a result, a lot of analog functions were realized in bipolar technology. The technology development, which is driven by digital circuits (in particular by flash memories), lead to smaller and faster CMOS devices. At the beginning of the seventies, 1µm transistors length was considered short. Currently, CMOS technology with 22nm channel length is available. In the last twenty years a lot of analog circuits started to be developed in CMOS technology. In fact, the technology scaling enabled CMOS devices at higher frequencies of working, also for the analog counterpart. Today, CMOS and bipolar technologies are in competition over a wide frequency region up to 100GHz. The challenge indeed, to choice the technology that fulfills best the system and circuit requirements at a reasonable cost. Bipolar is more expensive than standard CMOS technology. Moreover, most systems and circuits are mixed signal, i.e. they include digital and analog parts. In the past, separated integrated circuits were dedicated to the analog (bipolar) and digital (CMOS) circuits. As analog circuits were also available in CMOS technology, this technology started to offer the opportunity to integrate cheap, high density and low power digital circuits, as well as analog circuits, in the same chip. This brings enormous advantages in terms of reduced costs and smaller form factors of electronic devices. -
The MOS Tetrode Transistor Is Studied in This Project
AN ABSTRACT OF THE THESIS OF Thawee Limvorapun for the Master of Science (Name) (Degree) in Electrical and Electronics Engineering (Major) 4; -- 7 -- presented on . (Date) Title: THE MOS TETROD.° mr""TcTcm"" Redacted for Privacy Abstract approved: James C. Lodriey The MOS tetrode transistor is studied in this project. This device is ideally suited for high frequency and switching application. In effect it is the solid state analogy of a multigrid vacuum tube performing a very useful multigrid function. A new structure is developed for p-channel 10 ohm-cm. silicon substrate of (111) crystal orientation. This structure consists of an aluminum con- trol gate G1 buried in the pyrolytic SiO2, or E-gun evapo- ration SiO with thermal oxide for the control gate in- 2' sulator. An offset gate G2 produces another channel L2 and causes a longer pinchoff region in the device. The drain breakdown can be maximized so as to approach bulk breakdown as the result of the redistribution of the surfacefield. is very low, ap- The Miller feedback capacitance CGl-D proaching values similar to those of the vacuum pentodes. This paper describes the design, artwork, pyrolytic SiO and E-gun evaporation SiO process. The V-I 2 2 characteristics, dynamic drain resistance, capacitance, small signal equivalent circuit and large signal limitation, and drain breakdown voltage are also discussed. THE MOS TETRODE TRANSISTOR by Thawee Limvorapun A THESIS submitted to Oregon State University in partial fulfillment of the requirements for the degree of Master of Science June 1973 APPROVED: Redacted for Privacy Associa e rofessor of Electrical andEleC-E-Anics Engineering in charge of major Redacted for Privacy Head of Department of Electrical and Electronics Engineering Redacted for Privacy Dean of Graduate School Date thesis is presented 6- 7- 7 2 Typed by Erma McClanathan for Thawee Limvorapun ACKNOWLEDGMENTS I wish to express my sincere appreciation to my advisor, Professor James C. -

ECEN 474/704 Lab 7: Operational Transconductance Amplifiers
ECEN 474/704 Lab 7: Operational Transconductance Amplifiers Objective Design, simulate and layout an operational transconductance amplifier. Introduction The operational transconductance amplifier (OTA) is a basic building block of electronic systems. The function of a transconductor is to convert an input voltage to an output current. The transconductance amplifier can be configured to amplify or integrate either voltages or currents. The versatility of an OTA allows its use in many electronic systems such as filters, analog to digital converters, and oscillators. An OTA is also used as the core amplifier for an operational amplifier. The OTA is an essential element of many analog systems. The symbol for a single-ended OTA is shown in Figure 7-1. The amplifier has two voltage inputs and a single current output. Fully differential versions have two current outputs, and are commonly used in integrated circuits. Figure 7-1: The OTA Symbol The output current of an OTA is proportional to the difference between the input voltages. The relationship between the input voltages and output current is given by: Typical input-output characteristic for an OTA is shown in Figure 7-2. Notice that this characteristic is similar to the input-output characteristic for the differential amplifier. For a given maximum output current, the width of the OTA's linear region is inversely related to the magnitude of the transconductance. The larger the linear region, the smaller the transconductance and vice versa. Figure 7-2: Typical Input-Output Characteristics for an OTA The input and output resistances must be large in an OTA. Infinite input impedance allows maximum transfer of the source voltage to the input of the OTA. -

Design of Cascode-Based Transconductance Amplifiers with Low-Gain PVT Variability and Gain Enhancement Using a Body-Biasing Technique
Design of Cascode-Based Transconductance Amplifiers with Low-Gain PVT Variability and Gain Enhancement Using a Body-Biasing Technique Nuno Pereira2, Luis B. Oliveira1,2 , and João Goes1,2 1 Centre for Technologies and Systems (CTS) – UNINOVA 2 Dept. of Electrical Engineering (DEE), Universidade Nova de Lisboa (UNL) Campus FCT/UNL, 2829-516, Caparica, Portugal [email protected], [email protected], [email protected] Abstract. A body-biasing compensation scheme based on two proportional-to- absolute-temperature (PTAT) circuits is proposed to reduce the PVT variability of the DC gain of cascode amplifiers. A brief description of a basic PTAT is given as well as its application to cascode-based operational transconductance amplifiers. Simulation results show that the proposed compensated circuit amplifier exhibit a (DC) gain variability smaller than the original (uncompensated) circuit, while reaching a gain enhancement of about 3 dB. Keywords: amplifier, body-biasing, CMOS analog circuits, PVT compensation. 1 Introduction In order to increase speed and reduce area, MOS devices are scaled down. However, this leads to short channel effects, thus reducing the intrinsic gain. Therefore, due to the supply reduction, high gain OpAmps are harder to design and cascode techniques are more difficult to employ [1]. In analog CMOS circuit design, the transistor is preferentially used in saturation. The intrinsic gain of a MOS transistor is given by ⁄ (1) where is the transconductance and is the output conductance. For a MOS device in saturation, assuming an approximate square law for the drain current, the transconductance is given by ⁄ (2) where is the carrier mobility, is the oxide capacitance per unit of area, and are the width and length of the transistor, is the biasing gate source voltage and is the threshold voltage.