Switched-Capacitor Networks for Implementation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Switched-Capacitor Circuits
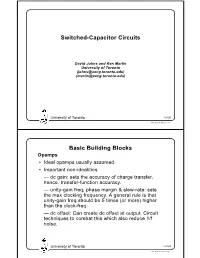
Switched-Capacitor Circuits David Johns and Ken Martin University of Toronto ([email protected]) ([email protected]) University of Toronto 1 of 60 © D. Johns, K. Martin, 1997 Basic Building Blocks Opamps • Ideal opamps usually assumed. • Important non-idealities — dc gain: sets the accuracy of charge transfer, hence, transfer-function accuracy. — unity-gain freq, phase margin & slew-rate: sets the max clocking frequency. A general rule is that unity-gain freq should be 5 times (or more) higher than the clock-freq. — dc offset: Can create dc offset at output. Circuit techniques to combat this which also reduce 1/f noise. University of Toronto 2 of 60 © D. Johns, K. Martin, 1997 Basic Building Blocks Double-Poly Capacitors metal C1 metal poly1 Cp1 thin oxide bottom plate C1 poly2 Cp2 thick oxide C p1 Cp2 (substrate - ac ground) cross-section view equivalent circuit • Substantial parasitics with large bottom plate capacitance (20 percent of C1) • Also, metal-metal capacitors are used but have even larger parasitic capacitances. University of Toronto 3 of 60 © D. Johns, K. Martin, 1997 Basic Building Blocks Switches I I Symbol n-channel v1 v2 v1 v2 I transmission I I gate v1 v p-channel v 2 1 v2 I • Mosfet switches are good switches. — off-resistance near G: range — on-resistance in 100: to 5k: range (depends on transistor sizing) • However, have non-linear parasitic capacitances. University of Toronto 4 of 60 © D. Johns, K. Martin, 1997 Basic Building Blocks Non-Overlapping Clocks I1 T Von I I1 Voff n – 2 n – 1 n n + 1 tTe delay 1 I fs { --- delay V 2 T on I Voff 2 n – 32e n – 12e n + 12e tTe • Non-overlapping clocks — both clocks are never on at same time • Needed to ensure charge is not inadvertently lost. -
Switched Capacitor Concepts & Circuits
Switched Capacitor Concepts & Circuits Outline • Why Switched Capacitor circuits? – Historical Perspective – Basic Building Blocks • Switched Capacitors as Resistors • Switched Capacitor Integrators – Discrete time & charge transfer concepts – Parasitic insensitive circuits • Signal Flow Graphs • Switched Capacitor Filters – Comparison to Active RC filters – Advantages of Fully Differential filters • Switched Capacitor Gain Circuits • Reducing the Effects of Charge Injection • Tradeoff between Speed and Charge Injection Why Switched Capacitor Circuits? • Historical Perspective – As MOS processes came to the forefront in the late 1970s and early 1980s, the advantages of integrating analog blocks such as active filters on the same chip with digital logic became a driving force for inovation. – Integrating active filters using resistors and capacitors to acturately set time constants has always been difficult, because of large process variations (> +/- 30%) and the fact that resistors and capacitors don’t naturally match each other. – So, analog engineers turned to the building blocks native to MOS processes to build their circuits, switches & capacitors. Since time constants can be set by the ratio of capacitors, very accurate filter responses became possible using switched capacitor techniques Æ Mixed-Signal Design was born! Switched Capacitor Building Blocks • Capacitors: poly-poly, MiM, metal sandwich & finger caps • Switches: NMOS, PMOS, T-gate • Op Amps: at first all NMOS designs, now CMOS Non-Overlapping Clocks • Non-overlapping clocks are used to insure that one set of switches turns off before the next set turns on, so that charge only flows where intended. (“break before make”) • Note the notation used to indicate time based on clock periods: ... (n-1)T, (n-½)T, nT, (n+½)T, (n+1)T .. -

Switched Capacitor Instrumentation Amplifier
LTC1043 Dual Precision Instrumentation Switched Capacitor Building Block FEATURES DESCRIPTIO U ■ Instrumentation Front End with 120dB CMRR The LTC®1043 is a monolithic, charge-balanced, dual ■ Precise, Charge-Balanced Switching switched capacitor instrumentation building block. A pair ■ Operates from 3V to 18V of switches alternately connects an external capacitor to ■ Internal or External Clock an input voltage and then connects the charged capacitor ■ Operates up to 5MHz Clock Rate across an output port. The internal switches have a ■ Low Power break-before-make action. An internal clock is provided ■ Two Independent Sections with One Clock and its frequency can be adjusted with an external capacitor. The LTC1043 can also be driven with an external APPLICATIOU S CMOS clock. The LTC1043, when used with low clock frequencies, ■ Precision Instrumentation Amplifiers provides ultra precision DC functions without requiring ■ Ultra Precision Voltage Inverters, Multipliers precise external components. Such functions are and Dividers differential voltage to single-ended conversion, voltage ■ V–F and F–V Converters inversion, voltage multiplication and division by 2, 3, 4, 5, ■ Sample-and-Hold etc. The LTC1043 can also be used for precise V–F and ■ Switched Capacitor Filters F–V circuits without trimming, and it is also a building block for switched capacitor filters, oscillators and modulators. The LTC1043 is manufactured using Linear Technology’s enhanced LTCMOSTM silicon gate process. , LTC and LT are registered trademarks of Linear Technology -

Switched-Capacitor Integrator
EE247 Lecture 10 • Switched-capacitor filters (continued) – Switched-capacitor integrators • DDI & LDI integrators – Effect of parasitic capacitance – Bottom-plate integrator topology – Switched-capacitor resonators – Bandpass filters – Lowpass filters – Switched-capacitor filter design considerations • Termination implementation • Transmission zero implementation • Limitations imposed by non-idealities EECS 247 Lecture 10 Switched-Capacitor Filters © 2008 H. K. Page 1 Switched-Capacitor Integrator C φ φ I φ 1 2 1 Vin - φ 2 Cs Vo + T=1/fs C C φ I φ I 1 2 Vin Vin - - C C s s Vo Vo + + φ High φ 1 2 High Æ C Charged to Vin s ÆCharge transferred from Cs to CI EECS 247 Lecture 10 Switched-Capacitor Filters © 2008 H. K. Page 2 Switched-Capacitor Integrator Output Sampled on φ1 φ φ 1 2 Vin CI φ - 1 Cs Vo Vo1 + φ φ φ φ φ Clock 1 2 1 2 1 Vin VCs Vo Vo1 EECS 247 Lecture 10 Switched-Capacitor Filters © 2008 H. K. Page 3 Switched-Capacitor Integrator ( (n-1)T n-3/2)Ts s (n-1/2)Ts nTs (n+1/2)Ts (n+1)Ts φ φ φ φ φ Clock 1 2 1 2 1 Vin Vs Vo Vo1 Φ 1 Æ Qs [(n-1)Ts]= Cs Vi [(n-1)Ts] , QI [(n-1)Ts] = QI [(n-3/2)Ts] Φ 2 Æ Qs [(n-1/2) Ts] = 0 , QI [(n-1/2) Ts] = QI [(n-1) Ts] + Qs [(n-1) Ts] Φ 1 _Æ Qs [nTs ] = Cs Vi [nTs ] , QI [nTs ] = QI[(n-1) Ts ] + Qs [(n-1) Ts] Since Vo1= - QI /CI & Vi = Qs / Cs Æ CI Vo1(nTs) = CI Vo1 [(n-1) Ts ] -Cs Vi [(n-1) Ts ] EECS 247 Lecture 10 Switched-Capacitor Filters © 2008 H. -
Practical Issues Designing Switched-Capacitor Circuit
Practical Issues Designing Switched-Capacitor Circuit ECEN 622 (ESS) Fall 2011 Practical Issues Designing Switched-Capacitor Circuit Material partially prepared by Sang Wook Park and Shouli Yan ELEN 622 Fall 2011 1 / 27 Switched-Capacitor practical issues Practical Issues Designing Switched-Capacitor Circuit MOS switch G G S Cov Cox Cov D S D Ron o Excellent Roff o Non-idea Effect Charge injection, Clock feed-through Finite and nonlinear Ron ELEN 622 Fall 2011 2 / 27 Switched-Capacitor practical issues Practical Issues Designing Switched-Capacitor Circuit Charge Injection G Qch1 Qch2 C VS o During TR. is turned on, Qch is formed at channel surface Qch = WLC OX (VGS −Vth ) When TR. is off, Qch1 is absorbed by Vs, but Qch2 is injected to C o Charge injected through overlap capacitor o Appeared as an offset voltage error on C ELEN 622 Fall 2011 3 / 27 Switched-Capacitor practical issues Practical Issues Designing Switched-Capacitor Circuit Charge Injection Effect CLK Ideal sw. Vout MOS sw. 0.1pF 1V CLK o When clock changes from high to low, Qch2 is injected to C o Compared to ideal sw., MOS sw. creates voltage error on Vout ELEN 622 Fall 2011 4 / 27 Switched-Capacitor practical issues Practical Issues Designing Switched-Capacitor Circuit Decrease Charge Injection Effect (1) CLK Vout W/L = 1/0.4 0.1pF 1V W/L = 10/0.4 o Decrease the effect of Qch o Use either bigger C or small TR. (small ratio of Cox/C) o Increased Ron ELEN 622 Fall 2011 5 / 27 Switched-Capacitor practical issues Practical Issues Designing Switched-Capacitor Circuit Decrease Charge Injection Effect (2) CLK CLKb 10/0.4 3.1/0.4 Vout With dummy sw. -
Lecture 3 Switched-Capacitor Circuits
ECE1371 Advanced Analog Circuits Lecture 3 Switched-Capacitor Circuits Trevor Caldwell [email protected] Circuit of the Day: Schmitt Trigger Problem: Input is noisy or slowly varying How do we turn this into a clean digital output? 2 ECE1371 Lecture Plan Date Lecture (Wednesday 2-4pm) Reference Homework 2020-01-07 1 MOD1 & MOD2 PST 2, 3, A 1: Matlab MOD1&2 2020-01-14 2 MODN + Toolbox PST 4, B 2: Toolbox 2020-01-21 3 SC Circuits R 12, CCJM 14 2020-01-28 4 Comparator & Flash ADC CCJM 10 3: Comparator 2020-02-04 5 Example Design 1 PST 7, CCJM 14 2020-02-11 6 Example Design 2 CCJM 18 4: SC MOD2 2020-02-18 Reading Week / ISSCC 2020-02-25 7 Amplifier Design 1 2020-03-03 8 Amplifier Design 2 2020-03-10 9 Noise in SC Circuits 2020-03-17 10 Nyquist-Rate ADCs CCJM 15, 17 Project 2020-03-24 11 Mismatch & MM-Shaping PST 6 2020-03-31 12 Continuous-Time PST 8 2020-04-07 Exam 2020-04-21 Project Presentation (Project Report Due at start of class) 3 ECE1371 What you will learn… • Motivation for SC Circuits • Basic sampling switch and charge injection errors • Fundamental SC Circuits Sample & Hold, Gain and Integrator • Other Circuits Bootstrapping, SC CMFB 4 ECE1371 Why Switched-Capacitor? • Used in discrete-time or sampled-data circuits Alternative to continuous-time circuits • Capacitors instead of resistors Capacitors won’t reduce the gain of high output impedance OTAs No need for low output impedance buffer to drive resistors • Accurate frequency response Filter coefficients determined by capacitor ratios (rather than RC time constants and clock frequencies) Capacitor matching on the order of 0.1% - when the transfer characteristics are a function of only a capacitor ratio, it can be very accurate RC time constants vary by up to 20% 5 ECE1371 Basic Building Blocks • Opamps Ideal usually assumed Some important non-idealities to consider include: 1. -

Analysis of Performance of Switched Capacitor Circuits E
et International Journal on Emerging Technologies 11 (2): 863-869(2020) ISSN No. (Print): 0975-8364 ISSN No. (Online): 2249-3255 Analysis of Performance of Switched Capacitor Circuits E. Sreenivasa Rao 1, S. Aruna Deepthi 2 and M. Satyam 3 1Professor and HOD, Department of Electronics and Communications, Vasavi College of Engineering (Telangana), India. 2Assistant Professor, Department of Electronics and Communications Vasavi College of Engineering (Telangana), India. 3Professor, Department of Electronics and Communications Vasavi College of Engineering (Telangana), India. (Corresponding author: S. Aruna Deepthi) (Received 04 January 2020, Revised 03 March 2020, Accepted 05 March 2020) (Published by Research Trend, Website: www.researchtrend.net) ABSTRACT: In switched capacitor circuits, it is quite common to use MOSFET switches, integrated capacitors (IC) and non-overlapping clocks for carrying out switching operations. MOSFET switches are far from ideal switches mainly when they are operated with small operating voltages. Some investigations have been carried out on the performance of switched capacitor resistors (SCRs) with the switches operated under varied conditions. Further, an attempt has been made to find out how closely SCR represents conventional resistors. It has been found that the SCRs with ideal components satisfy the properties of series and parallel connected conventional resistors. Further, the energy dissipation in SCR is the same as that in conventional resistors when operated under fixed voltage difference. FET based SCRs exhibit higher resistance values, compared to SCRs with ideal switches depending on the operating conditions. When SCRs are loaded with conventional resistors or capacitors, their output is entirely different from those, where only conventional components are used. -
Hybrid Switched-Capacitor Converters for High- Performance Power Conversions
Hybrid Switched-Capacitor Converters for High- Performance Power Conversions Wen Chuen Liu Electrical Engineering and Computer Sciences University of California, Berkeley Technical Report No. UCB/EECS-2021-25 http://www2.eecs.berkeley.edu/Pubs/TechRpts/2021/EECS-2021-25.html May 1, 2021 Copyright © 2021, by the author(s). All rights reserved. Permission to make digital or hard copies of all or part of this work for personal or classroom use is granted without fee provided that copies are not made or distributed for profit or commercial advantage and that copies bear this notice and the full citation on the first page. To copy otherwise, to republish, to post on servers or to redistribute to lists, requires prior specific permission. Acknowledgement I would like to express my sincere gratitude to my advisor, Professor Robert Pilawa. Without his support and guidance throughout the years, all of my hard work might not lead to today’s success. Besides that, I am grateful to get professional and insightful advice with the Professor Van Carey, Professor Ali Niknejad, and Professor Seth Sanders. Last but not least, it was my pleasure to be part of Pilawa’s team. Everyone in the team not only has a very high passion for their work but also with high engineering curiosity. I have learned a lot from them, not only as an engineer but also as a person! Thank you very much. Hybrid Switched-Capacitor Converters for High-Performance Power Conversions by Wen Chuen Liu A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Engineering | Electrical Engineering and Computer Sciences in the Graduate Division of the University of California, Berkeley Committee in charge: Associate Professor Robert C. -

Stacked Switched Capacitor Energy Buffer Architecture
Stacked Switched Capacitor Energy Buffer Architecture by Minjie Chen B.S., Tsinghua University (2009) Submitted to the Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY February 2012 © Massachusetts Institute of Technology 2012. All rights reserved. Author.............................................................. Department of Electrical Engineering and Computer Science December 29, 2011 Certified by. David J. Perreault Professor Thesis Supervisor Certified by. Khurram K. Afridi Visiting Associate Professor Thesis Supervisor Accepted by . Professor Leslie A. Kolodziejski Chairman, Department Committee on Graduate Students Department of Electrical Engineering and Computer Science 2 Stacked Switched Capacitor Energy Buffer Architecture by Minjie Chen Submitted to the Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology on December 29, 2011, in partial fulfillment of the requirements for the degree of Master of Science in Electrical Engineering Abstract Electrolytic capacitors are often used for energy buffering applications, including buffering between single-phase ac and dc. While these capacitors have high energy density compared to film and ceramic capacitors, their life is limited and their reli- ability is a major concern. This thesis presents a series of stacked switched capaci- tor (SSC) energy buffer architectures which overcome this limitation while achieving comparable effective energy density without electrolytic capacitors. The architectural approach is introduced along with design and control techniques which enable this energy buffer to interface with other circuits. A prototype SSC energy buffer using film capacitors, designed for a 320 V dc bus and able to support a 135 W load has been built and tested with a power factor correction circuit. -

Developing Large-Scale Field-Programmable Analog Arrays for Rapid Prototyping Tyson S
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Southern Adventist University Southern Adventist University KnowledgeExchange@Southern Faculty Works School of Computing 2005 Developing large-scale field-programmable analog arrays for rapid prototyping Tyson S. Hall Southern Adventist University, [email protected] Christopher M. Twigg Georgia Institute of Technology - Main Campus, [email protected] Paul Hasler Georgia Institute of Technology - Main Campus, [email protected] David V. Anderson Georgia Institute of Technology - Main Campus, [email protected] Follow this and additional works at: https://knowledge.e.southern.edu/facworks_comp Part of the Computer Engineering Commons Recommended Citation T. S. Hall, C. M. Twigg, P. Hasler, and D. V. Anderson, “Developing large–scale field–programmable analog arrays for rapid prototyping,” International Journal of Embedded Systems, Vol. 1, Nos. 3/4, pp.179–192, 2005 This Article is brought to you for free and open access by the School of Computing at KnowledgeExchange@Southern. It has been accepted for inclusion in Faculty Works by an authorized administrator of KnowledgeExchange@Southern. For more information, please contact [email protected]. Int. J. Embedded Systems, Vol. 1, Nos. 3/4, 2005 179 Developing large-scale field-programmable analog arrays for rapid prototyping Tyson S. Hall* School of Computing, Southern Adventist University, PO Box No. 370, Collegedale, TN 37315-0370, USA E-mail: [email protected] Christopher M. Twigg, Paul Hasler and David V. Anderson Georgia Institute of Technology, Atlanta, GA 30332-0250, USA E-mail: [email protected] E-mail: [email protected] E-mail: [email protected] Abstract: Field-programmable analog arrays (FPAAs) provide a method for rapidly prototyping analog systems. -

Circuit-Level Considerations for Mixed-Signal Programmable Components
Field-Programmable Mixed Systems Circuit-Level Considerations for Mixed-Signal Programmable Components Luigi Carro, Marcelo Negreiros, Gabriel Parmegiani Jahn, Adão Antônio de Souza Jr., and Denis Teixeira Franco Universidade Federal do Rio Grande do Sul tors in MOS technology take up too much The use of digital compensation algorithms eliminates the error introduced area. Moreover, programmability general- by switches and the nonlinear behavior of MOS transistors. This approach ly comes in the form of MOS switches. greatly reduces analog area and permits field-programmable mixed-signal systems built with entirely digital technologies. These transistors introduce some extra pole-zero pairs, and worse, they have non- linear voltage-current characteristics. IN THE PAST DECADE, researchers have paid signifi- We will show that, even when using analog tech- cant attention to the design of heterogeneous embedded nologies that allow components like linear capacitors systems. However, most of their work focused on digital or resistors, the resulting circuit will display nonlinear hardware and associated software,1,2 which remain firmly behavior because of the programmability requirement. rooted in an all-digital environment. In contrast, an embed- Moreover, this approach will still consume significant ded system must generally interface with the real world. At circuit area. this level, most signals are continuous time and can assume For these reasons, designers need a new paradigm only analog values. Most sensors (such as those for tem- for designing analog circuits. Here, we propose the use perature, pressure, humidity, resistance, and so on) gener- of nonlinear analog components with digital compen- ate small voltages or currents, and systems must preprocess sation. -

A Differential Switched-Capacitor Amplifier with Programmable Gain
A Differential Switched-Capacitor Amplifier with Programmable Gain and Output Offset Voltage Fabio Lacerda Stefano Pietri Alfredo Olmos Freescale Semiconductor Inc Freescale Semiconductor Inc Freescale Semiconductor Inc Rodovia SP 340, Km 128.7A Rodovia SP 340, Km 128.7A Rodovia SP 340, Km 128.7A Jaguariuna, SP - Brazil Jaguariuna, SP - Brazil Jaguariuna, SP - Brazil +55-19-3847-7278 +55-19-3847-6387 +55-19-3847-8581 [email protected] [email protected] [email protected] ABSTRACT The continuous increase in System-on-Chip (SoC) complexity has The design of a low-power differential switched-capacitor been placing strong constraints to analog Intellectual Proprietary amplifier for processing a fully-differential input signal coming (IP) design. Although SoCs are usually targeted to digital-tailored from a pressure sensor interface is reported. The circuit is technologies for financial reasons, they frequently demand low- intended to amplify the input signal, convert it to single-ended power low-voltage high-accuracy analog IPs. One way to mode and shift its output by an offset voltage. The gain and overcome these conflicting requirements is the use of Switched- output offset voltage are digitally programmable. The differential Capacitor (SC) circuits. Switched-capacitor technique efficiently switched-capacitor amplifier employs an op amp voltage compensates input offset and finite gain errors inherent to cancellation technique without requiring its output to slew to operational amplifiers (op amps). Moreover, due to its purely analog ground each time the amplifier is reset. Additionally, the capacitive load, op amps do not require a high-power output circuit topology is very insensitive to low op amp gain and allows driver, reducing area and power consumption as well as greatly to attain 9-bit linearity.