TI Designs: TIDA-01428 Automotive Discrete SBC Pre-Buck, Post-Boost with CAN Reference Design
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
D4.1 Preliminary BMS Design and Sensor Integration Concept
Ref. Ares(2021)2904016 - 30/04/2021 Delivering the 3b generation of LNMO cells for the xEV market of 2025 and beyond Preliminary BMS design and sensor integration concept Horizon 2020 | LC-BAT-5-2019 Research and innovation for advanced Li-ion cells (generation 3b) GA # 875033 Deliverable No. D4.1 Deliverable Title Preliminary BMS design and sensor integration concept Due Date 2020-04-30 Deliverable Type Report Dissemination level Public Written By Stefan Waldhör (FhG) 2021-04-30 Checked by Simone Mannori (ENEA) 2021-04-24 Approved by Claudio Lanciotti (MIT), Boschidar Ganev (AIT) 2021-04-29 Status Final 2021-04-30 This project has received funding from the European Union’s H2020 research and innovation programme under Grant Agreement no. 875033. This publication reflects only the author’s view and the Innovation and Networks Executive Agency (INEA) is not responsible for any use that may be made of the information it contains. Revision History Version Date Who Changes 1.1 2021-04-30 AIT • Reviewed final version of the document 1.0 2021-04-28 FhG • Final version of the document 0.14 2021-04-28 MIT • Review of the document 0.13 2021-04-21 FHG • Add conclusion • Add section on mechanical integration 0.12 2021-04-21 VALEO • Add section on thermal management system • Add image of foxBMS 2 Master Unit • Add paragraph on foxBMS 2 Master Unit • Update system architecture block diagram with TMB 0.11 2021-04-19 FhG • Add section on the Interface Board • Add section on data storage and connectivity • Add section on mechanical integration • Fix -

Fault Tolerant Design Techniques for Smart Power Drivers and Diagnostic Circuits
Fault Tolerant Design Techniques for Smart Power Drivers and Diagnostic Circuits Fehlertolerante Design-Techniken für Smart Power-Treiber und Diagnoseschaltungen Der Technischen Fakultat der Friedrich-Alexander Universität Erlangen-Nürnberg Zur Erlangung des Grades DOKTOR-INGENIEUR vorgelegt von Sri Navaneethakrishnan Easwaran Erode, India 1 Als Dissertation genehmigt von der Technischen Fakultät der Friedrich-Alexander-Universität Erlangen-Nürnberg Tag der mündlichen Prüfung: 23.05.2017 Vorsitzender des Promotionsorgans: Prof. Dr.-Ing. Reinhard Lerch Gutachter: Prof. Dr.-Ing. Dr.-Ing. habil. Robert Weigel Prof. Dr.-Ing. Martin März 2 Dedicated to my family 3 Abstract The demand for electronic control is increasing and is replacing most of the hydraulics in the automotive. Automobiles produced today have a longer life expectancy than at any time in the past. One of the strongest contributors for this is the increase in electronic equipment and systems that have replaced mechanical devices. Without proper electrical protection, however, these electronic systems in automobiles can fail without warning there by creating risk for the driver and passengers including injuries and life threat. Power semiconductor devices that are used in these electronic systems handle high currents in the order of 2A at 40V. Due to this high voltage and high current several design measures have to be considered in the design to make these circuits fault tolerant. The unintentional or inadvertent activation of the powerFETs should be avoided else it would trigger very high currents. In the light of this, the purpose of the present doctoral dissertation is set to contribute to the design of Smart Power Drivers for airbag squib driver applications. -

MC33907 08 Safe System Basis Chip Hardware Design and Product Guidelines
NXP Semiconductors Document Number: AN4766 Application Note Rev. 6.0, 2/2019 MC33907_08 safe system basis chip hardware design and product guidelines 1 Introduction Contents 1 Introduction . 1 This application note provides design guidelines for integrating the 2 Overview . 1 MC33907_08 system basis chip (SBC) into automotive and 2.1 Typical block diagram . 2 industrial electronic systems. It shows how to optimize PCB layout 2.2 Voltage regulators . 3 and gives recommendations regarding external components. 2.3 Built-in CAN transceiver . 4 2.4 Built-in LIN transceiver . 4 To minimize the EMC impact from embedded DC/DC converters, 2.5 Analog multiplexer . 4 pay attention to PCB component routing when designing with the 2.6 Configurable I/Os . 4 MC33907_08. 2.7 Safety outputs . 4 2.8 Fail-safe machine . 5 2.9 Low-power mode off . 5 2.10 Watchdog . 5 2.11 MCU flash programming . 5 2 Overview 2.12 Simplified internal power tree . 6 3 Known device behaviors . 7 The MC33907 and MC33908 are multi-output power supply 3.1 Unexpected current limitation report after start up . 7 integrated circuits dedicated to the automotive market. The 4 Application schematic . 8 MC33907_08 simplifies system implementation by providing ISO 5 Optional configurations . 9 26262 system solutions, documentation, and an optimized MCU 5.1 Pre-regulator, buck or buck-boost configuration . 9 interface, enabling customers to minimize the cost and complexity 5.2 VCCA, current capability . 10 of their designs. The MC33907_08’s integral EMC and ESD 5.3 VAUX . 10 protection also facilitates less complex system designs with 5.4 IO_0 ignition connection . -

TLIN1028-Q1 Automotive Local Interconnect Network (LIN)
TLIN1028-Q1 www.ti.com SLLSEX4A – AUGUST 2019 – REVISEDTLIN1028-Q1 OCTOBER 2020 SLLSEX4A – AUGUST 2019 – REVISED OCTOBER 2020 TLIN1028-Q1 Automotive LIN 125-mA System Basis Chip (SBC) 1 Features 2 Applications • AEC-Q100 (Grade 1): Qualified for automotive • Body electronics and lighting applications • Hybrid, electric & powertrain systems • Local interconnect network (LIN) physical layer • Automotive infotainment and cluster specification ISO/DIS 17987–4 compliant and • Appliances conforms to SAE J2602 recommended practice for LIN 3 Description • Functional Safety-Capable The TLIN1028-Q1 is a local interconnect network – Documentation available to aid functional safety (LIN) physical layer transceiver, compliant to LIN 2.2A system design ISO/DIS 17987–4 standards, with an integrated low • Supports 12-V applications dropout (LDO) voltage regulator. • Wide operating ranges This LIN system basis chip (SBC) reduces system – ±58 V LIN bus fault protection complexity by providing a 3.3 V or 5 V rail with up to – LDO output supporting 3.3 V or 5 V 70 mA (D) or 125 mA (DRB and DDA) of current to – Sleep mode: Ultra-low current power microprocessors, sensors or other devices. consumption allows wake-up event from: The TLIN1028-Q1 has an optimized current-limited • LIN bus or local wake through EN pin wave-shaping driver which reduces electromagnetic – Power-up and down glitch-free operation emissions (EME). The TLIN1028-Q1 converts the LIN protocol data stream on the TXD input into a LIN bus • Protection features: signal. The receiver converts the data stream to logic- – ESD protection, VSUP under-voltage protection level signals that are sent to the microprocessor – TXD dominant time out (DTO) protection, through the open-drain RXD pin. -

Automotive Solutions for Electro-Mobility Contents
Automotive Solutions for Electro-Mobility Contents 3 Smart Mobility 4 Electro-Mobility 5 Key Applications 6 Main Traction Inverter 7 On-Board Charger (OBC) 8 48V Start-Stop System 9 Bidirectional DC/DC Converter 10 Battery Management System 11 48V Electric Traction 12 Acoustic Vehicle Alerting System (AVAS) 13 HV Battery Disconnect & Fire-off System 14 Vehicle Control Unit (VCU) 16 Key Technologies 18 Development Tools 18 Product Selectors samples, Evaluation Boards 19 SPC5 Automotive MCU Evaluation Tools 21 AutoDevKit Smart Mobility It is estimated that 80% of all innovations in the automotive industry today are directly or indirectly enabled by electronics. With vehicle functionality improving with every new model this means a continuous increase in the semiconductor content per car. With over 30 years’ experience in automotive electronics, ST is a solid, innovative, and reliable partner with whom to build the future of transportation. ST’s Smart Mobility products and solutions are making driving safer, greener and more connected through the combination of several of our technologies. SAFER Driving is safer thanks to our Advanced Driver Assistance Systems (ADAS) – vision processing, radar, imaging and sensors, as well as our adaptive lighting systems, user display and monitoring technologies. GREENER Driving is greener with our automotive processors for engine management units, engine management systems, high-efficiency smart power electronics at the heart of all automotive sub-systems and devices for hybrid and electric vehicle applications. 80% MORE CONNECTED And vehicles are more connected using our infotainment-system and telematics of all innovations processors and sensors, as well as our radio tuners and amplifiers, positioning in the automotive technologies, and secure car-to-car and car-to-infrastructure (V2X) connectivity solutions. -
Automotive Power Selection Guide Ultimate Power – Perfect Control
Automotive Power Selection Guide Ultimate power – perfect control www.infineon.com/automotivepower The ultimate power to control your applications including automotive, transportation, industrial, lighting and motor control. For a comprehensive and reliable portfolio of products Our commitment to quality is demonstrated through for automotive and other applications, look no further than our focus on automotive excellence, the most rigorous zero the product range from Infineon. We have used our 40 defect program in the industry. years of experience of developing and producing products to meet the demands of the automotive market, and our This selection guide provides an overview of our ICs innovative technologies to design and produce a large and their packages, which are automotive qualified and number of power products that meet all requirements of available for your current and future electronic system the automotive industry and also the transportation, designs. lighting and motor-drive industries. 2 Automotive applications › Electric sunroof › Rear wiper › Airbag › Suspension › Window li › Power seat › Electric mirrors Power door › Font wiper › › Body control module/gateway › Starter alternator › Steering › Lighting › Throttle control › Headlight leveling › Engine control › Transmission › HVAC › Hybrid › Brake system Automotive power components used in other applications Industrial drives Electric toys 3 We meet all requirements for cost-effective application solutions Smart Power ICs Power System ICs Embedded Power ICs › Smart multi-channel -

Power Supply Platform and Functional Safety Concept Proposals for a Powertrain Transmission Electronic Control Unit
electronics Article Power Supply Platform and Functional Safety Concept Proposals for a Powertrain Transmission Electronic Control Unit Diana Raluca Biba 1, Mihaela Codruta Ancuti 1,*, Alexandru Ianovici 2, Ciprian Sorandaru 1 and Sorin Musuroi 1 1 Electrical Engineering Department, Faculty of Electrical and Power Engineering, University Politehnica Timisoara, 300223 Timisoara, Romania; [email protected] (D.R.B.); [email protected] (C.S.); [email protected] (S.M.) 2 Continental Automotive, Powertrain Transmission Department, 90411 Nurnberg, Germany; [email protected] * Correspondence: [email protected]; Tel.: +40-766-699556 Received: 12 May 2020; Accepted: 15 September 2020; Published: 27 September 2020 Abstract: In the last decade, modern vehicles have become very complex, being equipped with embedded electronic systems which include more than a thousand of electronic control units (ECUs). Therefore, it is mandatory to analyze the potential risk of automotive systems failure because it could have a significant impact on humans’ safety. This paper proposes a novel, functional safety concept at the power management level of a system basis chip (SBC), from the development phase to system design. In the presented case, the safety-critical application is represented by a powertrain transmission electronic control unit. A step-by-step design guideline procedure is presented, having as a focus the cost, safety, and performance to obtain a robust, cost-efficient, safe, and reliable design. To prove compliance with the ISO 26262 standard, quantitative worst-case evaluations of the hardware have been done. The assessment results qualify the proposed design with automotive safety integrity levels (ASIL, up to ASIL-D). -

AN13091, EV Traction Motor Power Inverter Control Reference Platform
AN13091 EV Traction Motor Power Inverter Control Reference Platform Rev. 1 — 19 March 2021 Application note 1 Acronyms Table 1. Acronyms Acronym Definition PIM Power Inverter Module VCU Vehicle Control Unit ECU Electronic Control Unit TC Traction Control SDK Software Development Kit SBC System Basis Chip SPI Serial Peripheral Interface MCU Micro-Controller Unit IGBT Insulated-Gate Bipolar Transistor GD Gate Driver ASIL Automotive Safety Integrity Level RDC Resolver-to-Digital Converter SiC Silicon Carbide CMF Common Mode Failure NXP Semiconductors AN13091 EV Traction Motor Power Inverter Control Reference Platform 2 General Description The NXP EV Power Inverter Control Reference Platform provides a hardware reference design, system basic software, and a complete system functional safety enablement as a foundation on which to develop a complete ASIL-D compliant high voltage, high-power traction motor inverter for electric vehicles. The Reference Platform has been designed into an evaluation prototype demonstrating 150 kW peak output power and >96% electrical efficiency operating from a 320 V supply voltage. The hardware reference platform is comprised of four boards: • System control board – Same design and components apply when transitioning from IGBT to SiC • Power stage driver board – GD3100 can be used for IGBT and SiC • Current sensor board • Vehicle interface board Figure 1. Inverter Control Reference Platform boards System control board: AN13091 All information provided in this document is subject to legal disclaimers. © NXP B.V. 2021. All rights reserved. Application note Rev. 1 — 19 March 2021 2 / 42 NXP Semiconductors AN13091 EV Traction Motor Power Inverter Control Reference Platform • This board contains three key NXP integrated circuits. -

Product Catalog 2021/2022 Product Catalog 2021/2022
Product Catalog 2021/2022 Product Catalog 2021/2022 Elmos Product Catalog | 2021/2022 1 Driving future mobility Made for you: Perfectly fitting ICs Elmos ICs bring innovation into the customer’s system. Innovation Matters - this is our Next to a broad range of ASSPs (Application Specific Standard Product) Elmos offers claim. We are one of the world’s most experienced semiconductor companies for the ASICs (Application Specific Integrated Circuit), that are specifically designed to the cus- automotive industry. Our components communicate, measure, regulate and control tomer’s needs. The advantage of an ASIC: The special chip is tailor-made for use in the safety, comfort, powertrain and network functions. For over 35 years, Elmos has been customer application and its individual design stays protected. bringing new functions to life and making mobility worldwide safer, more comfortable and more energy efficient. With our solutions we are already the worldwide #1 in appli- Best possible system integration, which means creating a higher functionality whilst cations with great future potential, such as ultrasonic distance measurement, ambient simultaneously reducing the complexity at system level, is the target of the work. System light and intuitive HMI. knowledge combined with expertise and the optimal choice of possible integration strat- egies are prerequisites for success. Elmos ICs serve the following global megatrends: Autonomous driving Our design teams are experts in the following application fields: Electromobility/CO reduction 2 Sensor ICs Safety, connectivity and comfort Ultrasonic Distance, Sensor Signal Processor, Optical IR, Smoke Detector, Passive Infrared With locations all over the world, we are represented in all key markets and always close Motor Control ICs to the customer. -
High Power X-Band RF Test Stand Development and High Power Testing of the CLIC Crab Cavity
High Power X-band RF Test Stand Development and High Power Testing of the CLIC Crab Cavity Benjamin J. Woolley This thesis is submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy August 2015 Abstract This thesis describes the development and operation of multiple high power X-band RF test facilities for high gradient acceleration and deflecting structures at CERN, as re- quired for the e+ e- collider research programme CLIC (Compact Linear Collider). Signif- icant improvements to the control system and operation of the first test stand, Xbox-1 are implemented. The development of the second X-band test stand at CERN, Xbox-2 is followed from inception to completion. The LLRF (Low Level Radio Frequency) system, interlock system and control algorithms are designed and validated. The third test stand at CERN, Xbox-3 is introduced and designs for the LLRF and control systems are pre- sented. The first of the modulator/klystron units from Toshiba and Scandinova is tested. CLIC will require crab cavities to align the bunches in order to provide effective head- on collisions. An X-band travelling wave cavity using a quasi-TM11 mode for deflection has been designed, manufactured and tested at the Xbox-2 high power test stand. The cavity reached an input power level in excess of 50 MW, at pulse widths of 150 ns with a measured breakdown rate (BDR) of better than 10 -5 breakdowns per pulse (BDs/pulse). At the nominal pulse width of 200 ns, the cavity reached an input power level of 43 MW with a BDR of 10-6 BDs/pulse. -

33742 33742S Advance Information System Basis Chip
查询MC33742DWR2供应商Freescale Semiconductor,捷多邦,专业PCB打样工厂,24小时加急出货 Inc. MOTOROLA Document order number: MC33742 SEMICONDUCTOR TECHNICAL DATA Rev 2.0, 10/2004 Advance Information 33742 33742S System Basis Chip (SBC) with Enhanced High-Speed CAN Transceiver SYSTEM BASIS CHIP WITH ENHANCED The 33742 and the 33742S are monolithic integrated circuits combining HIGH-SPEED CAN many functions frequently used by automotive environmental control units (ECUs). The 33742 is an SBC having a fully protected fixed 5.0 V low-drop regulator with current limit, overtemperature pre-warning, and reset. An output drive with . sense input is also provided to implement a second 5.0 V regulator, using an . external PNP bipolar junction transistor. The 33742 has normal, standby, stop, c and sleep modes, an internally switched high-side power supply output with n four wake-up inputs, programmable window watchdog, interrupt, reset, SPI I input control, and a high-speed CAN transceiver compatible with CAN 2.0 A , and B protocols for module-to-module communication. r DW SUFFIX o Features CASE 751F-05 t • High-Speed 1.0 Mbps CAN Interface with Bus Diagnostic Capability 28-TERMINAL SOICW c (Detection of CANH and CANL Short to Ground, to VDD, and to VSUP) u • Low-Drop Voltage 5.0 V, 200 mA V Regulator with Current-Limiting, d DD ORDERING INFORMATION n Overtemperature Pre-Warning, and Output Monitoring with Reset Temperature o • Additional 5.0 V Regulator with External Series Pass Transistor Device Package Range (TA) c • Normal, Standby, Stop, and Sleep Modes with Low Sleep -
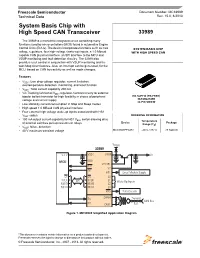
MC33989, System Basis Chip with High-Speed CAN Transceiver
Freescale Semiconductor Document Number: MC33989 Technical Data Rev. 15.0, 6/2013 System Basis Chip with High Speed CAN Transceiver 33989 The 33989 is a monolithic integrated circuit combining many functions used by microcontrollers (MCU) found in automotive Engine Control Units (ECUs). The device incorporates functions such as: two SYSTEM BASIS CHIP voltage regulators, four high-voltage (wake-up) inputs, a 1.0 Mbaud WITH HIGH SPEED CAN capable CAN physical interface, an SPI interface to the MCU and VSUP monitoring and fault detection circuitry. The 33989 also provides reset control in conjunction with VSUP monitoring and the watchdog timer features. Also, an Interrupt can be generated, for the MCU, based on CAN bus activity as well as mode changes. Features •VDD1: Low drop voltage regulator, current limitation, overtemperature detection, monitoring, and reset function •VDD1: Total current capability 200 mA • V2: Tracking function of VDD1 regulator. Control circuitry for external bipolar ballast transistor for high flexibility in choice of peripheral EG SUFFIX (PB-FREE) voltage and current supply 98ASB42345B 28-PIN SOICW • Low stand-by current consumption in Stop and Sleep modes • High speed 1.0 MBaud CAN physical interface • Four external high voltage wake-up inputs associated with HS1 VBAT switch ORDERING INFORMATION •150 mA output current capability for HS1 V switch allowing drive BAT Temperature of external switches pull-up resistors or relays Device Package Range (TA) •VSUP failure detection •40 V maximum transient voltage MC33989PEG/R2 - 40 to 125 °C 28 SOICW VPWR 33989 5.0 V VDD1 VSUP V2 MCU GND V2CTRL RST V2 INT HS1 Local Module Supply CS CS L0 SCLK SPI SCLK L1 Wake-Up Inputs MOSI MOSI L2 MISO MISO L3 WD Safe Circuits TX CANH Twisted CAN Bus RX CANL Pair Figure 1.