Dispersion Relations, Linearization and Stability
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mechanical Dispersion of Clay from Soil Into Water: Readily-Dispersed and Spontaneously-Dispersed Clay Ewa A
Int. Agrophys., 2015, 29, 31-37 doi: 10.1515/intag-2015-0007 Mechanical dispersion of clay from soil into water: readily-dispersed and spontaneously-dispersed clay Ewa A. Czyż1,2* and Anthony R. Dexter2 1Department of Soil Science, Environmental Chemistry and Hydrology, University of Rzeszów, Zelwerowicza 8b, 35-601 Rzeszów, Poland 2Institute of Soil Science and Plant Cultivation (IUNG-PIB), Czartoryskich 8, 24-100 Puławy, Poland Received July 1, 2014; accepted October 10, 2014 A b s t r a c t. A method for the experimental determination of Clay particles can either flocculate or disperse in aque- the amount of clay dispersed from soil into water is described. The ous solution. When flocculation occurs, the particles com- method was evaluated using soil samples from agricultural fields bine to form larger, compound particles such as soil in 18 locations in Poland. Soil particle size distributions, contents microaggregates. When dispersion occurs, the particles of organic matter and exchangeable cations were measured by separate in suspension due to their electrical charge. Clay standard methods. Sub-samples were placed in distilled water flocculation leads to soils that are considered to be stable in wa- and were subjected to four different energy inputs obtained by ter whereas dispersion is associated with soils that are consi- different numbers of inversions (end-over-end movements). The dered to be unstable in water. We may note that this termi- amounts of clay that dispersed into suspension were measured by light scattering (turbidimetry). An empirical equation was devel- nology is the opposite of that used in colloid science where oped that provided an approximate fit to the experimental data for the terms ‘stable’ and ‘unstable’ are used in relation to the turbidity as a function of number of inversions. -
Colloidal Suspensions
Chapter 9 Colloidal suspensions 9.1 Introduction So far we have discussed the motion of one single Brownian particle in a surrounding fluid and eventually in an extaernal potential. There are many practical applications of colloidal suspensions where several interacting Brownian particles are dissolved in a fluid. Colloid science has a long history startying with the observations by Robert Brown in 1828. The colloidal state was identified by Thomas Graham in 1861. In the first decade of last century studies of colloids played a central role in the development of statistical physics. The experiments of Perrin 1910, combined with Einstein's theory of Brownian motion from 1905, not only provided a determination of Avogadro's number but also laid to rest remaining doubts about the molecular composition of matter. An important event in the development of a quantitative description of colloidal systems was the derivation of effective pair potentials of charged colloidal particles. Much subsequent work, largely in the domain of chemistry, dealt with the stability of charged colloids and their aggregation under the influence of van der Waals attractions when the Coulombic repulsion is screened strongly by the addition of electrolyte. Synthetic colloidal spheres were first made in the 1940's. In the last twenty years the availability of several such reasonably well characterised "model" colloidal systems has attracted physicists to the field once more. The study, both theoretical and experimental, of the structure and dynamics of colloidal suspensions is now a vigorous and growing subject which spans chemistry, chemical engineering and physics. A colloidal dispersion is a heterogeneous system in which particles of solid or droplets of liquid are dispersed in a liquid medium. -

Double Negative Dispersion Relations from Coated Plasmonic Rods∗
MULTISCALE MODEL. SIMUL. c 2013 Society for Industrial and Applied Mathematics Vol. 11, No. 1, pp. 192–212 DOUBLE NEGATIVE DISPERSION RELATIONS FROM COATED PLASMONIC RODS∗ YUE CHEN† AND ROBERT LIPTON‡ Abstract. A metamaterial with frequency dependent double negative effective properties is constructed from a subwavelength periodic array of coated rods. Explicit power series are developed for the dispersion relation and associated Bloch wave solutions. The expansion parameter is the ratio of the length scale of the periodic lattice to the wavelength. Direct numerical simulations for finite size period cells show that the leading order term in the power series for the dispersion relation is a good predictor of the dispersive behavior of the metamaterial. Key words. metamaterials, dispersion relations, Bloch waves, simulations AMS subject classifications. 35Q60, 68U20, 78A48, 78M40 DOI. 10.1137/120864702 1. Introduction. Metamaterials are artificial materials designed to have elec- tromagnetic properties not generally found in nature. One contemporary area of research explores novel subwavelength constructions that deliver metamaterials with both a negative bulk dielectric constant and bulk magnetic permeability across cer- tain frequency intervals. These double negative materials are promising materials for the creation of negative index superlenses that overcome the small diffraction limit and have great potential in applications such as biomedical imaging, optical lithography, and data storage. The early work of Veselago [39] identified novel ef- fects associated with hypothetical materials for which both the dielectric constant and magnetic permeability are simultaneously negative. Such double negative media support electromagnetic wave propagation in which the phase velocity is antiparallel to the direction of energy flow and other unusual electromagnetic effects, such as the reversal of the Doppler effect and Cerenkov radiation. -

Plasma Waves
Plasma Waves S.M.Lea January 2007 1 General considerations To consider the different possible normal modes of a plasma, we will usually begin by assuming that there is an equilibrium in which the plasma parameters such as density and magnetic field are uniform and constant in time. We will then look at small perturbations away from this equilibrium, and investigate the time and space dependence of those perturbations. The usual notation is to label the equilibrium quantities with a subscript 0, e.g. n0, and the pertrubed quantities with a subscript 1, eg n1. Then the assumption of small perturbations is n /n 1. When the perturbations are small, we can generally ignore j 1 0j ¿ squares and higher powers of these quantities, thus obtaining a set of linear equations for the unknowns. These linear equations may be Fourier transformed in both space and time, thus reducing the differential equations to a set of algebraic equations. Equivalently, we may assume that each perturbed quantity has the mathematical form n = n exp i~k ~x iωt (1) 1 ¢ ¡ where the real part is implicitly assumed. Th³is form descri´bes a wave. The amplitude n is in ~ general complex, allowing for a non•zero phase constant φ0. The vector k, called the wave vector, gives both the direction of propagation of the wave and the wavelength: k = 2π/λ; ω is the angular frequency. There is a relation between ω and ~k that is determined by the physical properties of the system. The function ω ~k is called the dispersion relation for the wave. -
Known As the Dispersed Phase), Distributed Throughout a Continuous Phase (Known As Dispersion Medium)
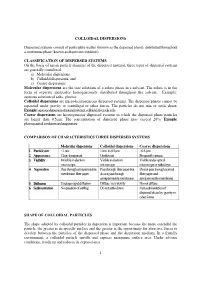
COLLOIDAL DISPERSIONS Dispersed systems consist of particulate matter (known as the dispersed phase), distributed throughout a continuous phase (known as dispersion medium). CLASSIFICATION OF DISPERSED SYSTEMS On the basis of mean particle diameter of the dispersed material, three types of dispersed systems are generally considered: a) Molecular dispersions b) Colloidal dispersions, and c) Coarse dispersions Molecular dispersions are the true solutions of a solute phase in a solvent. The solute is in the form of separate molecules homogeneously distributed throughout the solvent. Example: aqueous solution of salts, glucose Colloidal dispersions are micro-heterogeneous dispersed systems. The dispersed phases cannot be separated under gravity or centrifugal or other forces. The particles do not mix or settle down. Example: aqueous dispersion of natural polymer, colloidal silver sols, jelly Coarse dispersions are heterogeneous dispersed systems in which the dispersed phase particles are larger than 0.5µm. The concentration of dispersed phase may exceed 20%. Example: pharmaceutical emulsions and suspensions COMPARISON OF CHARACTERISTICS THREE DISPERSED SYSTEMS Molecular dispersions Colloidal dispersions Coarse dispersions 1. Particle size <1 nm 1 nm to 0.5 µm >0.5 µm 2. Appearance Clear, transparent Opalescent Frequently opaque 3. Visibility Invisible in electron Visible in electron Visible under optical microscope microscope microscope or naked eye 4. Separation Pass through semipermeable Pass through filter paper but Do not pass through -

CHAPTER 3 Transport and Dispersion of Air Pollution
CHAPTER 3 Transport and Dispersion of Air Pollution Lesson Goal Demonstrate an understanding of the meteorological factors that influence wind and turbulence, the relationship of air current stability, and the effect of each of these factors on air pollution transport and dispersion; understand the role of topography and its influence on air pollution, by successfully completing the review questions at the end of the chapter. Lesson Objectives 1. Describe the various methods of air pollution transport and dispersion. 2. Explain how dispersion modeling is used in Air Quality Management (AQM). 3. Identify the four major meteorological factors that affect pollution dispersion. 4. Identify three types of atmospheric stability. 5. Distinguish between two types of turbulence and indicate the cause of each. 6. Identify the four types of topographical features that commonly affect pollutant dispersion. Recommended Reading: Godish, Thad, “The Atmosphere,” “Atmospheric Pollutants,” “Dispersion,” and “Atmospheric Effects,” Air Quality, 3rd Edition, New York: Lewis, 1997, pp. 1-22, 23-70, 71-92, and 93-136. Transport and Dispersion of Air Pollution References Bowne, N.E., “Atmospheric Dispersion,” S. Calvert and H. Englund (Eds.), Handbook of Air Pollution Technology, New York: John Wiley & Sons, Inc., 1984, pp. 859-893. Briggs, G.A. Plume Rise, Washington, D.C.: AEC Critical Review Series, 1969. Byers, H.R., General Meteorology, New York: McGraw-Hill Publishers, 1956. Dobbins, R.A., Atmospheric Motion and Air Pollution, New York: John Wiley & Sons, 1979. Donn, W.L., Meteorology, New York: McGraw-Hill Publishers, 1975. Godish, Thad, Air Quality, New York: Academic Press, 1997, p. 72. Hewson, E. Wendell, “Meteorological Measurements,” A.C. -

Dispersion Relation & Index Ellipsoids
8/27/2020 Advanced Electromagnetics: 21st Century Electromagnetics Dispersion Relation & Index Ellipsoids Lecture Outline • Dispersion relation • Dispersion surfaces • Index ellipsoids Slide 2 1 8/27/2020 Dispersion Relation Slide 3 The Wave Vector The wave vector (wave momentum) is a vector quantity that conveys two pieces of information: 1. Wavelength and Refractive Index –The magnitude of the wave vector conveys the spatial period (i.e. wavelength) of the wave inside the material. When the frequency is known, the magnitude conveys the material’s refractive index n (more to be said later). 22 n k 0 free space wavelength 0 2. Direction –The direction of the wave is perpendicular to the wave fronts (more to be said later). ˆ kkakbkcabcˆˆ Slide 4 2 8/27/2020 The Dispersion Relation The dispersion relation for a material relates the wave vector to frequency . Essentially, it sets a rule for the values of as a function of direction and frequency. For an ordinary linear, homogeneous and isotropic (LHI) material, the dispersion relation is: 2 222n kkkabc c0 222 kkkabc 2 This can also be written as: 2 kk000 nc0 Slide 5 How to Derive the Dispersion Relation (1 of 2) The wave equation in a linear homogeneous anisotropic material is: 2 Assume no magnetic response i. e. 1 . Ek 00 r E 0 The solution to this equation is still a plane wave, but the allowed values for (modes) are more complicated. jk r ˆ E Ee00 E Eaabcˆˆ Eb Ec Substituting this solution into the wave equation leads to the following relation: 2 kk E000r0 kE k E 0 This equation has the form: abcˆˆ ˆ 0 Each (•••) term has the form: EEEabc 0 Each vector component must be set to zero independently. -

7 Plasmonics
7 Plasmonics Highlights of this chapter: In this chapter we introduce the concept of surface plasmon polaritons (SPP). We discuss various types of SPP and explain excitation methods. Finally, di®erent recent research topics and applications related to SPP are introduced. 7.1 Introduction Long before scientists have started to investigate the optical properties of metal nanostructures, they have been used by artists to generate brilliant colors in glass artefacts and artwork, where the inclusion of gold nanoparticles of di®erent size into the glass creates a multitude of colors. Famous examples are the Lycurgus cup (Roman empire, 4th century AD), which has a green color when observing in reflecting light, while it shines in red in transmitting light conditions, and church window glasses. Figure 172: Left: Lycurgus cup, right: color windows made by Marc Chagall, St. Stephans Church in Mainz Today, the electromagnetic properties of metal{dielectric interfaces undergo a steadily increasing interest in science, dating back in the works of Gustav Mie (1908) and Rufus Ritchie (1957) on small metal particles and flat surfaces. This is further moti- vated by the development of improved nano-fabrication techniques, such as electron beam lithographie or ion beam milling, and by modern characterization techniques, such as near ¯eld microscopy. Todays applications of surface plasmonics include the utilization of metal nanostructures used as nano-antennas for optical probes in biology and chemistry, the implementation of sub-wavelength waveguides, or the development of e±cient solar cells. 208 7.2 Electro-magnetics in metals and on metal surfaces 7.2.1 Basics The interaction of metals with electro-magnetic ¯elds can be completely described within the frame of classical Maxwell equations: r ¢ D = ½ (316) r ¢ B = 0 (317) r £ E = ¡@B=@t (318) r £ H = J + @D=@t; (319) which connects the macroscopic ¯elds (dielectric displacement D, electric ¯eld E, magnetic ¯eld H and magnetic induction B) with an external charge density ½ and current density J. -

Ch 6-Propagation in Periodic Media
Bloch waves and Bandgaps Chapter 6 Physics 208, Electro-optics Peter Beyersdorf Document info Ch 6, 1 Bloch Waves There are various classes of boundary conditions for which solutions to the wave equation are not plane waves Planar conductor results in standing waves E(z) = 2E0 sin (kzz) cos (ωt) Waveguide and cavities results in modal structure ikz E(x, y, z) = Enm(x, y)e− Periodic materials result in Bloch waves 2π/Λ iK" "r E! (!r) = E(K! , !r)e− · dK! !0 Ch 6, 2 Class Outline Types of periodic media dispersion relation in layered materials Bragg reflection Coupled mode theory Surface waves Ch 6, 3 Periodic Media Many useful materials and devices may have an inhmogenous index of refraction profile that is periodic Dielectric stack optical coatings Diffraction gratings Holograms Acousto-optic devices Photonic bandgap crystals Ch 6, 4 Periodic Media Many useful materials and devices may have an inhmogenous index of refraction profile that is periodic Dielectric stack optical coatings Diffraction gratings Holograms Acousto-optic devices Photonic bandgap crystals Ch 6, 5 Periodic Media Many useful materials and devices may have an inhmogenous index of refraction profile that is periodic Dielectric stack optical coatings Diffraction gratings Holograms Acousto-optic devices Photonic bandgap crystals Ch 6, 6 Periodic Media Many useful materials and devices may have an inhmogenous index of refraction profile that is periodic Dielectric stack optical coatings Diffraction gratings Holograms Acousto-optic devices Photonic bandgap crystals Ch 6, 7 Periodic -
Electromagnetism - Lecture 13
Electromagnetism - Lecture 13 Waves in Insulators Refractive Index & Wave Impedance • Dispersion • Absorption • Models of Dispersion & Absorption • The Ionosphere • Example of Water • 1 Maxwell's Equations in Insulators Maxwell's equations are modified by r and µr - Either put r in front of 0 and µr in front of µ0 - Or remember D = r0E and B = µrµ0H Solutions are wave equations: @2E µ @2E 2E = µ µ = r r r r 0 r 0 @t2 c2 @t2 The effect of r and µr is to change the wave velocity: 1 c v = = pr0µrµ0 prµr 2 Refractive Index & Wave Impedance For non-magnetic materials with µr = 1: c c v = = n = pr pr n The refractive index n is usually slightly larger than 1 Electromagnetic waves travel slower in dielectrics The wave impedance is the ratio of the field amplitudes: Z = E=H in units of Ω = V=A In vacuo the impedance is a constant: Z0 = µ0c = 377Ω In an insulator the impedance is: µrµ0c µr Z = µrµ0v = = Z0 prµr r r For non-magnetic materials with µr = 1: Z = Z0=n 3 Notes: Diagrams: 4 Energy Propagation in Insulators The Poynting vector N = E H measures the energy flux × Energy flux is energy flow per unit time through surface normal to direction of propagation of wave: @U −2 @t = A N:dS Units of N are Wm In vacuo the amplitudeR of the Poynting vector is: 1 1 E2 N = E2 0 = 0 0 2 0 µ 2 Z r 0 0 In an insulator this becomes: 1 E2 N = N r = 0 0 µ 2 Z r r The energy flux is proportional to the square of the amplitude, and inversely proportional to the wave impedance 5 Dispersion Dispersion occurs because the dielectric constant r and refractive index -

Food Dispersion Systems Process Stabilization. a Review
───Food Technology ─── Food dispersion systems process stabilization. A review. Andrii Goralchuk, Olga Grinchenko, Olga Riabets, Оleg Kotlyar Kharkiv State University of Food Technology and Trade, Kharkiv, Ukraine Abstract Keywords: Introduction. The overview is given to systematize Emulsion information on the indicators, affecting the production and Foam stabilization of foams and emulsions, for applying the Stabilization existing regularities for more complex dispersed Rheology (polyphase) systems. Layers Materials and methods. Analytical studies of the production and stabilization of foams and polyphase dispersed systems published over the past 20 years. The research focuses on the foams, emulsions, foam emulsion systems and the systems, being simultaneously foam, Article history: emulsion and suspension. Results and discussion. Though foams and Received 28.11.2018 emulsions have similarities and their production differs in Received in revised form 15.08.2019 the dispersion rate, determined by the rate of surfactants Accepted 28.11.2019 adsorption. Emulsifying is faster than foaming, therefore, the production of foam emulsions can be sequential only. Coalescence, as a destruction indicator, is typical of foams and emulsions alike, and it is determined by the properties Corresponding author: of surfactants. Other indicators are determined by the features of the dispersion medium. The study systematized Andrii Goralchuk the factors, ensuring the stability of dispersion systems. The E-mail: structural mechanical factor is effective in -

Dilute Species Transport in Non-Newtonian, Single-Fluid, Porous Medium Systems
DILUTE SPECIES TRANSPORT IN NON-NEWTONIAN, SINGLE-FLUID, POROUS MEDIUM SYSTEMS Minge Jiang A technical report submitted to the faculty at the University of North Carolina at Chapel Hill in partial fulfillment of the requirements for the degree of Master of Science in Environmental Engineering in the Department of Environmental Sciences and Engineering in the Gillings School of Global Public Health. Chapel Hill 2019 Approved by: Cass T. Miller Orlando Coronell Jason D. Surratt i © 2019 Minge Jiang ALL RIGHTS RESERVED ii ABSTRACT Minge Jiang (Under the direction of Cass T. Miller) Vast reserves of natural gas held in tight shale formations have become accessible over the last two decades as a result of horizontal drilling and hydraulic fracturing. Hydraulic fracturing creates patterns of fractures that increase the permeability of the shale. The production of natural gas from such formations has led to the U.S. becoming a net exporter of natural gas, lowered energy costs, and led to a reduction in coal-fired power generation, thereby reducing greenhouse gas emissions. The hydraulic fracturing process is complex and poses environmental risks, which are not clearly understood. Many fundamental questions remain to be answered before these risks can be clearly understood and analyzed. The difficulties result from the injection and attempted recovery of non-Newtonian fluids, which often include many species considered pollutants if encountered in drinking water, under gravitationally and viscously unstable conditions. This work investigates how species disperse in non-Newtonian fluids, which is a topic that has received scant attention in the literature. Dispersion is a deviation from the mean rate of movement, and it is caused by a combination of factors including molecular diffusion, and pore-scale velocity distributions, which are in turn affected by viscosity variations.