Dilute Species Transport in Non-Newtonian, Single-Fluid, Porous Medium Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mechanical Dispersion of Clay from Soil Into Water: Readily-Dispersed and Spontaneously-Dispersed Clay Ewa A
Int. Agrophys., 2015, 29, 31-37 doi: 10.1515/intag-2015-0007 Mechanical dispersion of clay from soil into water: readily-dispersed and spontaneously-dispersed clay Ewa A. Czyż1,2* and Anthony R. Dexter2 1Department of Soil Science, Environmental Chemistry and Hydrology, University of Rzeszów, Zelwerowicza 8b, 35-601 Rzeszów, Poland 2Institute of Soil Science and Plant Cultivation (IUNG-PIB), Czartoryskich 8, 24-100 Puławy, Poland Received July 1, 2014; accepted October 10, 2014 A b s t r a c t. A method for the experimental determination of Clay particles can either flocculate or disperse in aque- the amount of clay dispersed from soil into water is described. The ous solution. When flocculation occurs, the particles com- method was evaluated using soil samples from agricultural fields bine to form larger, compound particles such as soil in 18 locations in Poland. Soil particle size distributions, contents microaggregates. When dispersion occurs, the particles of organic matter and exchangeable cations were measured by separate in suspension due to their electrical charge. Clay standard methods. Sub-samples were placed in distilled water flocculation leads to soils that are considered to be stable in wa- and were subjected to four different energy inputs obtained by ter whereas dispersion is associated with soils that are consi- different numbers of inversions (end-over-end movements). The dered to be unstable in water. We may note that this termi- amounts of clay that dispersed into suspension were measured by light scattering (turbidimetry). An empirical equation was devel- nology is the opposite of that used in colloid science where oped that provided an approximate fit to the experimental data for the terms ‘stable’ and ‘unstable’ are used in relation to the turbidity as a function of number of inversions. -
Colloidal Suspensions
Chapter 9 Colloidal suspensions 9.1 Introduction So far we have discussed the motion of one single Brownian particle in a surrounding fluid and eventually in an extaernal potential. There are many practical applications of colloidal suspensions where several interacting Brownian particles are dissolved in a fluid. Colloid science has a long history startying with the observations by Robert Brown in 1828. The colloidal state was identified by Thomas Graham in 1861. In the first decade of last century studies of colloids played a central role in the development of statistical physics. The experiments of Perrin 1910, combined with Einstein's theory of Brownian motion from 1905, not only provided a determination of Avogadro's number but also laid to rest remaining doubts about the molecular composition of matter. An important event in the development of a quantitative description of colloidal systems was the derivation of effective pair potentials of charged colloidal particles. Much subsequent work, largely in the domain of chemistry, dealt with the stability of charged colloids and their aggregation under the influence of van der Waals attractions when the Coulombic repulsion is screened strongly by the addition of electrolyte. Synthetic colloidal spheres were first made in the 1940's. In the last twenty years the availability of several such reasonably well characterised "model" colloidal systems has attracted physicists to the field once more. The study, both theoretical and experimental, of the structure and dynamics of colloidal suspensions is now a vigorous and growing subject which spans chemistry, chemical engineering and physics. A colloidal dispersion is a heterogeneous system in which particles of solid or droplets of liquid are dispersed in a liquid medium. -
Known As the Dispersed Phase), Distributed Throughout a Continuous Phase (Known As Dispersion Medium)
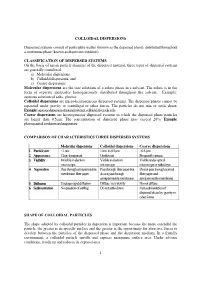
COLLOIDAL DISPERSIONS Dispersed systems consist of particulate matter (known as the dispersed phase), distributed throughout a continuous phase (known as dispersion medium). CLASSIFICATION OF DISPERSED SYSTEMS On the basis of mean particle diameter of the dispersed material, three types of dispersed systems are generally considered: a) Molecular dispersions b) Colloidal dispersions, and c) Coarse dispersions Molecular dispersions are the true solutions of a solute phase in a solvent. The solute is in the form of separate molecules homogeneously distributed throughout the solvent. Example: aqueous solution of salts, glucose Colloidal dispersions are micro-heterogeneous dispersed systems. The dispersed phases cannot be separated under gravity or centrifugal or other forces. The particles do not mix or settle down. Example: aqueous dispersion of natural polymer, colloidal silver sols, jelly Coarse dispersions are heterogeneous dispersed systems in which the dispersed phase particles are larger than 0.5µm. The concentration of dispersed phase may exceed 20%. Example: pharmaceutical emulsions and suspensions COMPARISON OF CHARACTERISTICS THREE DISPERSED SYSTEMS Molecular dispersions Colloidal dispersions Coarse dispersions 1. Particle size <1 nm 1 nm to 0.5 µm >0.5 µm 2. Appearance Clear, transparent Opalescent Frequently opaque 3. Visibility Invisible in electron Visible in electron Visible under optical microscope microscope microscope or naked eye 4. Separation Pass through semipermeable Pass through filter paper but Do not pass through -

CHAPTER 3 Transport and Dispersion of Air Pollution
CHAPTER 3 Transport and Dispersion of Air Pollution Lesson Goal Demonstrate an understanding of the meteorological factors that influence wind and turbulence, the relationship of air current stability, and the effect of each of these factors on air pollution transport and dispersion; understand the role of topography and its influence on air pollution, by successfully completing the review questions at the end of the chapter. Lesson Objectives 1. Describe the various methods of air pollution transport and dispersion. 2. Explain how dispersion modeling is used in Air Quality Management (AQM). 3. Identify the four major meteorological factors that affect pollution dispersion. 4. Identify three types of atmospheric stability. 5. Distinguish between two types of turbulence and indicate the cause of each. 6. Identify the four types of topographical features that commonly affect pollutant dispersion. Recommended Reading: Godish, Thad, “The Atmosphere,” “Atmospheric Pollutants,” “Dispersion,” and “Atmospheric Effects,” Air Quality, 3rd Edition, New York: Lewis, 1997, pp. 1-22, 23-70, 71-92, and 93-136. Transport and Dispersion of Air Pollution References Bowne, N.E., “Atmospheric Dispersion,” S. Calvert and H. Englund (Eds.), Handbook of Air Pollution Technology, New York: John Wiley & Sons, Inc., 1984, pp. 859-893. Briggs, G.A. Plume Rise, Washington, D.C.: AEC Critical Review Series, 1969. Byers, H.R., General Meteorology, New York: McGraw-Hill Publishers, 1956. Dobbins, R.A., Atmospheric Motion and Air Pollution, New York: John Wiley & Sons, 1979. Donn, W.L., Meteorology, New York: McGraw-Hill Publishers, 1975. Godish, Thad, Air Quality, New York: Academic Press, 1997, p. 72. Hewson, E. Wendell, “Meteorological Measurements,” A.C. -

Food Dispersion Systems Process Stabilization. a Review
───Food Technology ─── Food dispersion systems process stabilization. A review. Andrii Goralchuk, Olga Grinchenko, Olga Riabets, Оleg Kotlyar Kharkiv State University of Food Technology and Trade, Kharkiv, Ukraine Abstract Keywords: Introduction. The overview is given to systematize Emulsion information on the indicators, affecting the production and Foam stabilization of foams and emulsions, for applying the Stabilization existing regularities for more complex dispersed Rheology (polyphase) systems. Layers Materials and methods. Analytical studies of the production and stabilization of foams and polyphase dispersed systems published over the past 20 years. The research focuses on the foams, emulsions, foam emulsion systems and the systems, being simultaneously foam, Article history: emulsion and suspension. Results and discussion. Though foams and Received 28.11.2018 emulsions have similarities and their production differs in Received in revised form 15.08.2019 the dispersion rate, determined by the rate of surfactants Accepted 28.11.2019 adsorption. Emulsifying is faster than foaming, therefore, the production of foam emulsions can be sequential only. Coalescence, as a destruction indicator, is typical of foams and emulsions alike, and it is determined by the properties Corresponding author: of surfactants. Other indicators are determined by the features of the dispersion medium. The study systematized Andrii Goralchuk the factors, ensuring the stability of dispersion systems. The E-mail: structural mechanical factor is effective in -

Ch 1 Questions-01162013
Colloidal Suspension Rheology Chapter 1 Study Questions 1. What forces act on a single colloidal particle suspended in a flowing fluid? Discuss the dependence of these forces on particle radius . 2. What are the interaction forces between particles in a solvent? What parameters affect their strength? 3. Discuss the range of the interparticle surface forces? 4. Explain what is meant by kinetic stability with regard to colloidal dispersions. 5. You are trying to flocculate a colloidal dispersion in a plant-size operation at 500 K using calcium oxide (CaO). In your laboratory, all you have available at the moment is sodium chloride (NaCl). At room temperature, you find that 2 mol/L NaCl is necessary to flocculate the colloidal dispersion. Estimate the concentration of CaO necessary to flocculate the dispersion in your plant operation. 6. What is the difference between the behavior of power law fluids and Bingham bodies at low stress levels? 7. What is the signature of the relaxation time for Maxwellian fluids in stress relaxation and in oscillatory experiments? 8. With regard to oscillatory shear experiments, explain the relative evolution of stress and strain curves as a function of time for (a) perfectly elastic materials, (b) perfectly inelastic (viscous) materials and (c) viscoelastic materials. 9. What is the role of a polymer in colloidal dispersion stability for a) Grafted or adsorbed polymer b) Dissolved, non-adsorbed polymer? 10. Discuss the characteristics of hard sphere suspension and difficulties in realizing this experimentally. 11. Define the dimensionless groups: De (Deborah number); Wi (Weissenberg number); Pe (Péclet number) 12. Why are colloidal particles defined by size limitations from nanometers to micrometers? 13. -

Dispersion Kernels for Water Wave Simulation
Dispersion Kernels for Water Wave Simulation Jose´ A. Canabal1 David Miraut1 Nils Thuerey2 Theodore Kim3;4 Javier Portilla5 Miguel A. Otaduy1 1URJC Madrid 2Technical University of Munich 3Pixar Animation Studios 4Universiy of California, Santa Barbara 5Instituto de Optica, CSIC Figure 1: Rain on the pond. Our wave simulation method captures the gravity waves present in the wakes produced by the paper birds, as well as the capillary waves produced by rain drops, all with correct scale-dependent velocities. The waves reflect on all the objects in the scene, both static and dynamic. The domain is 4 meters wide, and is simulated on a 1024 × 1024 grid, at just 1:6 sec. per frame. Abstract thesizing height field waves with correct dispersion [Tessendorf 2004b]. However, handling obstacle boundaries in the frequency We propose a method to simulate the rich, scale-dependent dynam- domain is computationally expensive, and quickly renders any ap- ics of water waves. Our method preserves the dispersion proper- proach in this direction impractical. Thus, users have to resort to lo- ties of real waves, yet it supports interactions with obstacles and is calized three-dimensional simulations [Nielsen and Bridson 2011], computationally efficient. Fundamentally, it computes wave accel- precomputations [Jeschke and Wojtan 2015], or height field ap- erations by way of applying a dispersion kernel as a spatially variant proaches with spatial filtering techniques [Kass and Miller 1990; filter, which we are able to compute efficiently using two core tech- Tessendorf 2008]. While the latter methods are typically fast, they nical contributions. First, we design novel, accurate, and compact only roughly approximate or even neglect dispersion effects. -

Dispersion Systems 1
Dispersion Systems 1. The Classification of Dispersion Systems 2. Lyophobic Colloids 3. The Stability and Coagulation of Dispersion Systems 4. Properties of Colloids n Dispersion system is a heterogeneous system containing one or two substances in the form of particles spread in the medium made of another substance Dispersion system consists of a dispersed phase (DP) and a dispersion medium (DM) n The dispersed phase is a split substance n The dispersion medium is a medium where this split substance is spread n Dispersion means splitting n Every substance can exist both in the form of a monolith and a split substance flour, small bubbles, small drops To characterize the dispersion systemwe use the following values: 1. The transverse size of the dispersed phase: n For spherical particles -a sphere diameter (d) n For particles having a shape of a cube -edge of the cube (ℓ) 2. The substance splitting of a dispersed phase is characterized by the degree of dispersion (δ) which is opposite to the medium diameter (d) of the spherical particles or the medium length of the edge of the cube (ℓ) δ = 1/d, m-1 or δ = 1/ℓ, m-1 Dispersed phase has the degree of dispersion The degree of dispersion is greater and the particle size is less n Clouds, fumes, soil, clay are the examples of dispersion systems 1. The Classification of Dispersion Systems I. According to the dispersion degree of particles of the dispersed phase II. According to the aggregative state of the phase and the medium III. According to the kinetic properties of the dispersed phase IV. -

Colloidal Dispersion: 1.Basing on Charge- (+), (-) 2.Basing on State of Matter – Solid, Liquid, Gas
COLLOIDS Greek – glue like Colloids are dispersions where in dispersed particles are distributed uniformly in the dispersion medium. Dispersed particles size Small- less than 0.01µ Medium- 5-1µ Large- 10-1000µ Def: Colloids systems are defined as those polyphasic systems where at least one dimension of the dispersed phase measures between 10-100A0 to a few micrometers. Characteristics of dispersed phase: 1.Particle size: This influence colour of dispersion. Wavelength of light absorbed α 1/ Radius (small wavelength)VIBGYOR (large wavelength) 2.Particle shape: Depends on the preparation method and affinity of dispersion medium This influence colour of dispersion. Shapes- spherical, rods, flakes, threads, ellipsoidal. Gold particles- spherical (red), disc (blue). 3. Surface area: Particle size small- large surface area Effective catalyst, enhance solubility. 4. Surface charge: Positive (+)= gelatin, aluminum. Negative (-) = acacia, tragacanth. Particle interior neutral, surface charged. Surface charge leads to stability of colloids because of repulsions. Pharmaceutical applications: 1. Therapy 2. Absorption & toxicity 3. Solubility 4. Stability 5. Targeting of drug to specific organ. 1. Therapy: Small size – good absorption- better action- treatment. Silver-germicidal Copper-anticancer Mercury- anti syphilis 2.Absorption & toxicity Sulfur deficiency treatment Colloidal sulfur- small size particles- faster absorption- excess sulfur concentration in blood- toxicity 3.Solubility Insoluble drug Colloidal system+ Surfactants (sulfonamides, (micellar solublization) phenobarbitones) 4. Stability: Colloidal systems are used as pharmaceutical excipients, vehicles, carriers, product components. Dispersion of surfactants Association colloids – increase stability of drug (liquid dosage form) Dispersion of macromolecules (gelatin), Tablet Coating synthetic polymers (HPMC) 5. Targeting of drug to specific organ. Drug entrapped liposomes, niosomes, nanoparticles, microemulsions targeted to liver, spleen. -

Dispersion Relations, Linearization and Stability
Dispersion relations, stability and linearization 1 Dispersion relations Suppose that u(x; t) is a function with domain {−∞ < x < 1; t > 0g, and it satisfies a linear, constant coefficient partial differential equation such as the usual wave or diffusion equation. It happens that these type of equations have special solutions of the form u(x; t) = exp(ikx − i!t); (1) or equivalently, u(x; t) = exp(σt + ikx): (2) We typically look for solutions of the first kind (1) when wave-like behavior which oscillates in time is expected, whereas (2) is used to investigate growth or decay in time. Plugging either (1) or (2) into the equation yields an algebraic relationship of the form ! = !(k) or σ = σ(k), called the dispersion relation. It characterizes the dynamics of spatially oscillating modes of the form exp(ikx). 2 Here are a couple standard examples. For the wave equation utt = c uxx, we plug in a wave- like solution (1) to get −!2 exp(ikx−i!t) = −c2k2 exp(ikx−i!t), or !(k) = ±ck. This means there are traveling wave solutions of the form u = exp(ik(x ± ct)), which we might have guessed from the d’Alembert formula. 2 For the diffusion equation ut = Duxx, we use (2) to get σ(k) = −Dk . Since this is negative for all k, it is expected that solutions which are superpositions of (2) also decay. This is consistent with the fundamental solution representation for the diffusion equation. 1.1 Stability For dispersion relations of the form σ = σ(k) stemming from (2), the sign of the real part of σ indicates whether the solution will grow or decay in time. -

Theory of Dispersion in a Granular Medium
:70 Theory of Dispersion in a Granular Medium GEOLOGICAL SURVEY PROFESSIONAL PAPER 411-1 OD «! a i £ O I?i c MAY 2 6 1970 WRD Theory of Dispersion in a Granular Medium By AKIO OGATA GEOLOGICAL SURVEY PROFESSIONAL PAPER 411-1 A review of the theoretical aspects of dispersion offluid flowing through a porous material UNITED STATES GOVERNMENT PRINTING OFFICE, WASHINGTON : 1970 UNITED STATES DEPARTMENT OF THE INTERIOR WALTER J. HICKEL, Secretary GEOLOGICAL SURVEY William T. Pecora, Director For sale by the Superintendent of Documents, U.S. Government Printing Office Washington, D.C. 20402 - Price 45 cents (paper cover) CONTENTS Page Page Symbols... .-.-.._._...__....___.__.._.___ IV Field equation for two-fluid systems... .----.-..-._ 19 Abstract. --.___-_____..___-___--.__---_______.____. II Adsorption_ _ _____________________________________ 10 Introduction- __-___-___-_____--____--_______.______ 1 Mathematical treatment of the dispersion equation. _ _ _ _ 12 Acknowledgments..__....__._______.._._______ 2 Nature of the dispersion coefficient.___________________ 23 Historical development-_________________________ 2 Evaluation of dispersion coefficient by analytical Derivation of the basic field equations_________---___ 4 methods._-________.-_____---______----._-_._ 25 Isotropic dispersion. ..^......................... 5 Anisotropic dispersion.__________________________ 6 Evaluation of dispersion coefficient by experimental Some useful transformations.____________________ 7 methods. _-.__ .__.__________.-_.__..__ 27 Dispersion equation in cylindrical and spherical Summary....____..__,-._.._.__.--__. ._..___. 32 coordinates. ___.__-_-_.___..._-____.__-_-_. 8 References cited..-.._.__._,-____________ 33 ILLUSTRATIONS Page FIGURE 1. -

PARTICLE DISPERSION for SIZE ANALYSIS As Published in GXP, Summer 2011 (Vol15/No3) Jorie Kassel
PARTICLE DISPERSION FOR SIZE ANALYSIS As published in GXP, Summer 2011 (Vol15/No3) Jorie Kassel KEY POINTS The following key points are discussed: • While particle size analysis can provide great insight in the pharmaceutical industry, it can be nearly meaningless if obtained improperly. • A particle size distribution can be found for both colloidal dispersions (containing particles <1 µm) and suspensions (containing particles >1 µm). • A well-dispersed colloid or suspension is one in which the minimum particle size has been achieved and operationally defined by the observance of a constant (minimum) particle size distribution during the dispersion process. • All sample preparation should begin with microscopic observation of dry powders and liquids “as-is” before dispersion occurs. • A primary particle is the smallest identifiable subdivision in a particulate system. Primary particles may join to form “soft” (easy to disperse) or “hard” (fused) agglomerates. • A preparation for liquid particle size analysis is comprised of the material of interest, a carrier, and a surfactant or dispersing agent if needed. • Selection of a carrier should be based on the chemical composition of the material being tested. Upon dispersion, the material should not dissolve, shrink, swell, or react with the surrounding media. • Surfactants are amphiphilic materials that reduce the surface tension between the material and carrier, thereby improving the carrier’s ability to wet the material if needed. • If mechanical stirring is not enough energy to separate soft agglomerates, ultrasonic energy may be applied via indirect or direct methods. • It is important to understand the reasons why determination of the particle size is necessary and how it will be used in a particular process.