Open Carl Delacato Thesis.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Diptera: Syrphidae
This is a repository copy of The relationship between morphological and behavioral mimicry in hover flies (Diptera: Syrphidae).. White Rose Research Online URL for this paper: http://eprints.whiterose.ac.uk/80035/ Version: Accepted Version Article: Penney, HD, Hassall, C orcid.org/0000-0002-3510-0728, Skevington, JH et al. (2 more authors) (2014) The relationship between morphological and behavioral mimicry in hover flies (Diptera: Syrphidae). The American Naturalist, 183 (2). pp. 281-289. ISSN 0003-0147 https://doi.org/10.1086/674612 Reuse Unless indicated otherwise, fulltext items are protected by copyright with all rights reserved. The copyright exception in section 29 of the Copyright, Designs and Patents Act 1988 allows the making of a single copy solely for the purpose of non-commercial research or private study within the limits of fair dealing. The publisher or other rights-holder may allow further reproduction and re-use of this version - refer to the White Rose Research Online record for this item. Where records identify the publisher as the copyright holder, users can verify any specific terms of use on the publisher’s website. Takedown If you consider content in White Rose Research Online to be in breach of UK law, please notify us by emailing [email protected] including the URL of the record and the reason for the withdrawal request. [email protected] https://eprints.whiterose.ac.uk/ The relationship between morphological and behavioral mimicry in hover flies (Diptera: Syrphidae)1 Heather D. Penney, Christopher Hassall, Jeffrey H. Skevington, Brent Lamborn & Thomas N. Sherratt Abstract Palatable (Batesian) mimics of unprofitable models could use behavioral mimicry to compensate for the ease with which they can be visually discriminated, or to augment an already close morphological resemblance. -
The Syrphid Fly, Mesogramma Marginata, and the Flowers of Apocynum.* *
THE SYRPHID FLY, MESOGRAMMA MARGINATA, AND THE FLOWERS OF APOCYNUM.* * RAYMOND C. OSBURN. The flowers of the various species of the dogbane, Apocynum spp., have long been known to catch some of the weaker sorts of insects attracted by them, but as far as I am aware, no such wholesale slaughter of a particular species as that herein •described has been noted. In fact, if I may judge by the con- versations which I have held with both botanists and entomol- ogists, the capacity of the dogbane for trapping insects has pretty generally escaped notice. My own attention was drawn to the subject last summer "when Miss Edith Weston, a young student of botany at the Ohio State University Lake Laboratory at Put-in-Bay, brought in some flowers of Apocynum androscemifolium and called my attention to the fact that the flowers had "bugs" in them. A glance at the flowers showed that there were insects in nearly all of them and that these were all of one species, the common little Syrphid fly, Mesogramma marginata (Say). Many of these were still alive, though evidently held in such a manner that they could not escape. As the flowers are open bells, my curiosity was aroused and I began a careful examination. Having in mind the related milkweed, Asclepias, whose flower clusters sometimes entangle the legs of insects by a sticky secretion, I was a little surprised to find that all of the flies in the Apocynum flowers were held by the proboscis. As many as four were present in some of the flowers, the little bell being as full as it would hold. -

Syrphidae of Southern Illinois: Diversity, Floral Associations, and Preliminary Assessment of Their Efficacy As Pollinators
Biodiversity Data Journal 8: e57331 doi: 10.3897/BDJ.8.e57331 Research Article Syrphidae of Southern Illinois: Diversity, floral associations, and preliminary assessment of their efficacy as pollinators Jacob L Chisausky‡, Nathan M Soley§,‡, Leila Kassim ‡, Casey J Bryan‡, Gil Felipe Gonçalves Miranda|, Karla L Gage ¶,‡, Sedonia D Sipes‡ ‡ Southern Illinois University Carbondale, School of Biological Sciences, Carbondale, IL, United States of America § Iowa State University, Department of Ecology, Evolution, and Organismal Biology, Ames, IA, United States of America | Canadian National Collection of Insects, Arachnids and Nematodes, Ottawa, Canada ¶ Southern Illinois University Carbondale, College of Agricultural Sciences, Carbondale, IL, United States of America Corresponding author: Jacob L Chisausky ([email protected]) Academic editor: Torsten Dikow Received: 06 Aug 2020 | Accepted: 23 Sep 2020 | Published: 29 Oct 2020 Citation: Chisausky JL, Soley NM, Kassim L, Bryan CJ, Miranda GFG, Gage KL, Sipes SD (2020) Syrphidae of Southern Illinois: Diversity, floral associations, and preliminary assessment of their efficacy as pollinators. Biodiversity Data Journal 8: e57331. https://doi.org/10.3897/BDJ.8.e57331 Abstract Syrphid flies (Diptera: Syrphidae) are a cosmopolitan group of flower-visiting insects, though their diversity and importance as pollinators is understudied and often unappreciated. Data on 1,477 Syrphid occurrences and floral associations from three years of pollinator collection (2017-2019) in the Southern Illinois region of Illinois, United States, are here compiled and analyzed. We collected 69 species in 36 genera off of the flowers of 157 plant species. While a richness of 69 species is greater than most other families of flower-visiting insects in our region, a species accumulation curve and regional species pool estimators suggest that at least 33 species are yet uncollected. -

Syritta Syrphus
3.a. At least apical 1/4 of front tibia black, at most 5th segment of front tarsus yel- low; bristles on front tarsus all black; pleura with 4 yellow spots; abdominal bands orange-yellow, with the posterior bands on tergites 3 and 4 strongly curved (figure 752). 10-16 mm. Southern Europe, extinct in Central Europe › Spilomyia digitata Rondani 3.b. Front tibiae yellow, at most with a black spot on apical 1/8. At least 4th and 5th segments of front tarsus yellow; bris- tles on at least ventral side of 4th and 5th segments of front tarsus yellow. Pleura with 5 yellow spots. Abdomen with nar- row yellow bands, the anteromedial yel- low band on tergites 2-4 slightly sepa- rated in the middle (figure 753). 10-15 mm. Central and Southern Europe, Turkey › Spilomyia saltuum Fabricius figure 755. Syritta pipiens, habitus of female (Verlinden). SYRITTA Key 1. Male: femur 3 strongly thickened, but Introduction hardly bent, basally without protuber- ance; tergites 2 and 3 with small, pale Syritta pipiens is a very common hoverfly spots (figure 754). Female: ocellar triangle found everywhere that plants are flower- black or bluish, metallic sheen; thoracic ing. They are small, linear hoverflies with dorsum dusted along side margin; tergite a characteristic flight pattern; they hover, 4: side and hind margins not dusted (fig- make a small turn and a quick flight, ure 755). 7-9 mm. Cosmopolitan › hover again, etc. Their larvae live in Syritta pipiens Linnaeus decaying plant material. Jizz: small ‘stick’ hovering in front of flowers or in vegetation. -
Vol 10 Part 1. Diptera. Syrphidae
Royal Entomological Society HANDBOOKS FOR THE IDENTIFICATION OF BRITISH INSECTS To purchase current handbooks and to download out-of-print parts visit: http://www.royensoc.co.uk/publications/index.htm This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 2.0 UK: England & Wales License. Copyright © Royal Entomological Society 2012 ROYAL ENTOMOLOGICAL SOCIETY OF LONDON Vol. X. Part 1. HANDBOOKS FOR THE IDENTIFICATION OF BRITISH INSECTS DIPTERA SYRPHIDAE By R. L. COE LONDON Published by the Society • and Sold at its Rooms 4-1, Queen's Gate, S.W. 7 2sth August, 195"3 Accession No. 4966 Author Coe R L Subject DIPTERA HANDBOOKS FOR THE IDENTIFICATION OF BRITISH INSECTS The aim of this series of publications is to provide illustrated keys to the whole of the British Insects (in so far as this is possible), in ten volumes, as follows : I. Part I. General Introduction. Part 9. Ephemeroptera. , 2. Thysanura. , 10. Odonata. , 3. Protura. , 11. Thysanoptera. , 4. Collembola. , 12. Neuroptera. , 5. Dermaptera and , 13. :Mecoptera. Orthoptera. , 14. Trichoptera. , 6. Plecoptera. , 15. Strepsiptera. , 7. Psocoptera. , 16. Siphonaptera. , 8. Anoplura. II. Hemiptera. Ill. Lepidoptera. IV. and V. Coleoptera. VI. Hymenoptera : Symphyta and Aculeata. VII. Hymenoptera : Ichneumonoidea. VIII. Hymenoptera : Cynipoidea, Chalcidoidea, and Serphoidea. IX. Diptera: Nematocera and Brachycera. X. Diptera : Cyclorrhapha. Volumes II to X will be divided into parts of convenient size, but it is not po....a.1~u:-....:~.----.....l.L ___....__ __ _ ...:.• _ _ ....._-J....._,_. __~ _ _.__ Co ACCESSION NUMBER .................... .. .......... and each 1 >Ugh much 1ted, it is e British Entomological & Natural History Pa Society availa c/o Dinton Pastures Country Park, Oli Davis Street, Hurst, 1trar at th• Reading, Berkshire Tli RG10 OTH cost of init Presented by .. -

The Role of Ecological Compensation Areas in Conservation Biological Control
The role of ecological compensation areas in conservation biological control ______________________________ Promotor: Prof.dr. J.C. van Lenteren Hoogleraar in de Entomologie Promotiecommissie: Prof.dr.ir. A.H.C. van Bruggen Wageningen Universiteit Prof.dr. G.R. de Snoo Wageningen Universiteit Prof.dr. H.J.P. Eijsackers Vrije Universiteit Amsterdam Prof.dr. N. Isidoro Università Politecnica delle Marche, Ancona, Italië Dit onderzoek is uitgevoerd binnen de onderzoekschool Production Ecology and Resource Conservation Giovanni Burgio The role of ecological compensation areas in conservation biological control ______________________________ Proefschrift ter verkrijging van de graad van doctor op gezag van de rector magnificus van Wageningen Universiteit, Prof. dr. M.J. Kropff, in het openbaar te verdedigen op maandag 3 september 2007 des namiddags te 13.30 in de Aula Burgio, Giovanni (2007) The role of ecological compensation areas in conservation biological control ISBN: 978-90-8504-698-1 to Giorgio Multaque tum interiisse animantum saecla necessest nec potuisse propagando procudere prolem. nam quaecumque vides vesci vitalibus auris aut dolus aut virtus aut denique mobilitas est ex ineunte aevo genus id tutata reservans. multaque sunt, nobis ex utilitate sua quae commendata manent, tutelae tradita nostrae. principio genus acre leonum saevaque saecla tutatast virus, vulpis dolus et gfuga cervos. at levisomma canum fido cum pectore corda et genus omne quod est veterino semine partum lanigeraeque simul pecudes et bucera saecla omnia sunt hominum tutelae tradita, Memmi. nam cupide fugere feras pacemque secuta sunt et larga suo sine pabula parta labore, quae damus utilitatiseorum praemia causa. at quis nil horum tribuit natura, nec ipsa sponte sua possent ut vivere nec dare nobis praesidio nostro pasci genus esseque tatum, scilicet haec aliis praedae lucroque iacebant indupedita suis fatalibus omnia vinclis, donec ad interutum genus id natura redegit. -
The Hoverflies of Marsland Nature Reserve
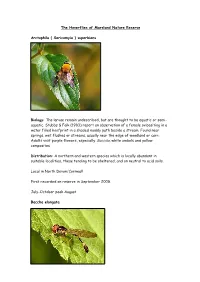
The Hoverflies of Marsland Nature Reserve Arctophila ( Sericomyia ) superbiens Biology: The larvae remain undescribed, but are thought to be aquatic or semi- aquatic. Stubbs & Falk (1983) report an observation of a female ovipositing in a water filled hoofprint in a shaded muddy path beside a stream. Found near springs, wet flushes or streams, usually near the edge of woodland or carr. Adults visit purple flowers, especially Succisa, white umbels and yellow composites Distribution: A northern and western species which is locally abundant in suitable localities, these tending to be sheltered, and on neutral to acid soils. Local in North Devon/Cornwall First recorded on reserve in September 2008. July-October peak August Baccha elongata Biology: This species is found in shady places such as woodland rides and edges, hedgerows and mature gardens, where adults may be seen hovering low amongst ground-layer plants. The larvae are aphidophagous, preying on a variety of ground-layer species in shaded situations, e.g. Uromelan jaceae on Centaurea scabiosa, Brachycaudina napelli on Aconitum, and the bramble aphid, Sitobion fragariae onRubus. It overwinters as a larva Distribution: Widely recorded throughout Britain, but like most woodland species, scarce or absent from poorly-wooded areas such as the East Anglian fens and the Scottish islands. There is considerable uncertainty about the status of B. obscuripennis which has often been regarded as a distinct species. Most records submitted to the scheme are attributed to “ Baccha spp.”, but analysis of those where separation has been attempted do not suggest any differences in range, flight period or habitat preference Brachypalpoides lenta ( Xylota lenta ) Biology: The larvae of this species occur in decaying heartwood of beech, particularly in live trees with exposed decay at ground level. -

Multitrophic Ecosystem Services of Hoverflies in Strawberry
Multitrophic ecosystem services of hoverflies in strawberry Thesis submitted for the degree of Doctor of Philosophy (PhD) Royal Holloway University of London February 2020 Dylan James Hodgkiss 2 To all the people (and insects and flowering plants) who made this project possible. And to my family and friends for humouring me through the hard times and the good. 3 Acknowledgements I would like to thank my supervisors Michelle Fountain and Mark Brown for their expert advice, patient support and guidance over the course of this PhD programme. Without your input and feedback, completing this project would quite simply have been impossible for me. I have learned so much from you both. I would also like to thank Beth Clare for her clear explanations of molecular methods, as well as her time and efforts more generally, with the hoverfly gut content analysis chapter. I am also deeply indebted to my colleagues and friends at RHUL and NIAB EMR for their advice, support and good humour: Callum Martin, Alvaro Delgado, Hauke Koch, Adrian Harris, Gemma Baron, Phil Brain, Fabio Manfredini, Beth Shaw, Emily Bailes, Graham Caspell, Arran Folly, Maddie Cannon, Ash Samuelson, David Buss, Judy Bagi, Dilly Rogers, Eva Muiruri, Megan McKerchar, Harry Siviter, Julien Lecourt, Dara Stanley, Roger Payne, Elli Leadbeater, Karen Thurston, Tracey Jeffries, Adam Whitehouse, Rob Prouse, Jean Fitzgerald, Charles Whitfield, Chantelle Jay and Zeus Mateos. Outside of RHUL and NIAB EMR, I am also very grateful to Mark Jitlal for his statistical advice, Roger Morris and Chris Raper for their expert advice with fly identification, and to the eight fruit farmers who granted me access to their strawberry fields for field surveys in 2015: Jackie Clews, James Dearing, Tom Maynard, Richard Pendry, Marion Regan, Greg Secrett, John Tobutt and Andrej Zygora. -

Shetland's Hoverflies
Shetland’s Hoverflies A PHOTOGRAPHIC IDENTIFICATION GUIDE Rebecca Nason Hoverflies are the most attractive group of flies! There are over 280 species of hoverfly in the UK but currently only around 40 recorded on the Shetland Islands and illustrated here. Although flight times vary, the majority of Shetland hoverflies can be seen between May and late September, out in the countryside or in more urban parks and gardens. Hoverflies are important pollinators and a crucial part of a healthy natural environment. The best places to look for them is on garden flowers or flower-filled ditches and verges in summer. They are sun- worshippers too, so when not busy feeding on flower nectar or enjoying ‘hovering’ in mid-air, they can often be seen perfectly still, basking on sunlit leaves. Most Shetland hoverflies can be identified with close inspection in the field and from photographs.Try to take as many close-up photographs as possible, including a side, top and front profile to aid key identification features. With a little effort and patience, most of these hoverflies can easily be recognised by their clear, often colourful, distinctive markings by even the most amateur of naturalists. A number of hoverflies have very different looking males and females so a good starting point is telling them apart. This is easily done as male hoverflies have eyes that join in the middle, females are clearly separated. Several of our hoverflies are black and yellow, resembling wasps, others are brown and furry like bumblebees or the honey bee. Indeed their shape and behaviour can also imitate wasps or bees. -

British Phenological Records Indicate High Diversity and Extinction Rates Among LateSummerFlying Pollinators
British phenological records indicate high diversity and extinction rates among late-summer-flying pollinators Article (Accepted Version) Balfour, Nicholas J, Ollerton, Jeff, Castellanos, Maria Clara and Ratnieks, Francis L W (2018) British phenological records indicate high diversity and extinction rates among late-summer-flying pollinators. Biological Conservation, 222. pp. 278-283. ISSN 0006-3207 This version is available from Sussex Research Online: http://sro.sussex.ac.uk/id/eprint/75609/ This document is made available in accordance with publisher policies and may differ from the published version or from the version of record. If you wish to cite this item you are advised to consult the publisher’s version. Please see the URL above for details on accessing the published version. Copyright and reuse: Sussex Research Online is a digital repository of the research output of the University. Copyright and all moral rights to the version of the paper presented here belong to the individual author(s) and/or other copyright owners. To the extent reasonable and practicable, the material made available in SRO has been checked for eligibility before being made available. Copies of full text items generally can be reproduced, displayed or performed and given to third parties in any format or medium for personal research or study, educational, or not-for-profit purposes without prior permission or charge, provided that the authors, title and full bibliographic details are credited, a hyperlink and/or URL is given for the original metadata page and the content is not changed in any way. http://sro.sussex.ac.uk 1 British phenological records indicate high diversity and extinction 2 rates among late-summer-flying pollinators 3 4 5 Nicholas J. -

Loch Leven Species Count
Loch Leven Species Count Preferred name Common name Coccinella septempunctata 7-spot Ladybird Alnus glutinosa Alder Persicaria amphibia Amphibious Bistort Poa annua Annual Meadow-grass Cerapteryx graminis Antler Moth Fraxinus excelsior Ash Populus tremula Aspen Scorzoneroides autumnalis Autumn Hawkbit Coenagrion puella Azure Damselfly Nemotelus uliginosus Barred Snout Gandaritis pyraliata Barred Straw Nymphula nitidulata Beautiful China-mark Autographa pulchrina Beautiful Golden Y Fagus sylvatica Beech Erica cinerea Bell Heather Vaccinium myrtillus Bilberry Bombus monticola Bilberry Bumblebee Yponomeuta evonymella Bird-cherry Ermine Chroicocephalus ridibundus Black-headed Gull Black East Indian Duck Black East Indian Duck Chrysopilus cristatus Black Snipefly Turdus merula Blackbird Sylvia atricapilla Blackcap Prunus spinosa Blackthorn Ischnura elegans Blue-tailed Damselfly Cyanistes caeruleus Blue Tit Pteridium aquilinum Bracken Lacanobia oleracea Bright-line Brown-eye Gonepteryx rhamni rhamni Brimstone Rumex obtusifolius Broad-leaved Dock Epilobium montanum Broad-leaved Willowherb Dryopteris dilatata Broad Buckler-fern Chloromyia formosa Broad Centurion Bombus humilis Brown-banded Carder Bee Rattus norvegicus Brown Rat Bombus terrestris Buff-tailed Bumblebee Anchusa arvensis Bugloss Diachrysia chrysitis Burnished Brass Buteo buteo Buzzard Corvus corone Carrion Crow Corvus corone subsp. corone Carrion Crow Hypochaeris radicata Cat's-ear Fringilla coelebs Chaffinch Tyria jacobaeae Cinnabar Galium aparine Cleavers Apamea crenata Clouded-bordered -

Classical and Conservation Biological Control of Pest Insects Within Prairie and Crop Systems Rene Hessel Iowa State University
Iowa State University Capstones, Theses and Graduate Theses and Dissertations Dissertations 2013 Classical and conservation biological control of pest insects within prairie and crop systems Rene Hessel Iowa State University Follow this and additional works at: https://lib.dr.iastate.edu/etd Part of the Agriculture Commons, Ecology and Evolutionary Biology Commons, and the Entomology Commons Recommended Citation Hessel, Rene, "Classical and conservation biological control of pest insects within prairie and crop systems" (2013). Graduate Theses and Dissertations. 13539. https://lib.dr.iastate.edu/etd/13539 This Thesis is brought to you for free and open access by the Iowa State University Capstones, Theses and Dissertations at Iowa State University Digital Repository. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Iowa State University Digital Repository. For more information, please contact [email protected]. Classical and conservation biological control of pest insects within prairie and crop systems by Rene Hessel A thesis submitted to the graduate faculty in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Major: Entomology Program of Study Committee: Matthew E. O’Neal, Major Professor Erin W. Hodgson Diane M. Debinski Iowa State University Ames, Iowa 2013 Copyright © Rene Hessel, 2013. All rights reserved. ii Table of Contents Chapter I. General Introduction and Literature Review Thesis Organization 1 Introduction and Literature Review 1 Aphis glycines biology 3 Resident natural enemies in the US and China 6 Classical biological control and Binodoxys communis biology 8 Conservation biological control 10 Objectives 11 References Cited 14 Chapter II. Binodoxys communis (Hymenoptera: Braconidae): pitfalls and strengths of a promising candidate for biological control of the soybean aphid, Aphis glycines Abstract 21 Introduction 22 Materials and Methods 25 Results 34 Discussion 38 Acknowledgments 43 References Cited 44 Figure Legends 49 Figures 54 Chapter III.