Evaluation of Fog and Low Stratus Cloud Microphysical Properties Derived from in Situ Sensor, Cloud Radar and SYRSOC Algorithm
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Precipitation Effects of Giant Cloud Condensation Nuclei Artificially Introduced Into Stratocumulus Clouds
Atmos. Chem. Phys., 15, 5645–5658, 2015 www.atmos-chem-phys.net/15/5645/2015/ doi:10.5194/acp-15-5645-2015 © Author(s) 2015. CC Attribution 3.0 License. Precipitation effects of giant cloud condensation nuclei artificially introduced into stratocumulus clouds E. Jung1, B. A. Albrecht1, H. H. Jonsson2, Y.-C. Chen3,4, J. H. Seinfeld3, A. Sorooshian5, A. R. Metcalf3,*, S. Song1, M. Fang1, and L. M. Russell6 1Rosenstiel School of Marine and Atmospheric Science, University of Miami, Miami, FL, USA 2Center for Interdisciplinary Remotely-Piloted Aircraft Studies, Naval Postgraduate School, Monterey, California, USA 3California Institute of Technology, Pasadena, California, USA 4Jet Propulsion Laboratory, California Institute of Technology, Pasadena, California, USA 5Department of Chemical and Environmental Engineering, and Department of Atmospheric Sciences, University of Arizona, Tucson, Arizona, USA 6Scripps Institution of Oceanography, University of California, San Diego, La Jolla, California, USA *now at: Department of Mechanical Engineering, University of Minnesota, Minneapolis, Minnesota, California, USA Correspondence to: E. Jung ([email protected]) Received: 7 November 2014 – Published in Atmos. Chem. Phys. Discuss.: 7 January 2015 Revised: 6 April 2015 – Accepted: 11 April 2015 – Published: 22 May 2015 Abstract. To study the effect of giant cloud condensation 1 Introduction nuclei (GCCN) on precipitation processes in stratocumulus clouds, 1–10 µm diameter salt particles (salt powder) were The stratocumulus (Sc) cloud deck is the most persistent released from an aircraft while flying near the cloud top on cloud type in the world, and the variations of the cloud 3 August 2011 off the central coast of California. The seeded amount and the albedo can significantly impact the climate area was subsequently sampled from the aircraft that was system through their radiative effects on the earth system equipped with aerosol, cloud, and precipitation probes and (e.g., Hartmann et al., 1992; Slingo, 1990). -

Touching the Clouds Activity Guide
Touching the Clouds Activity Guide Purpose Provide a mental representation of each cloud type Create a tactile cloud identification chart Overview Individuals will construct and touch a tactile model of common types of clouds to learn how to describe the clouds based on their shape and texture. They will compare their descriptions with the standard classifications using the cloud types identified in the GLOBE Clouds Protocol. Time: 45 minutes to 1 ½ hours, depending on individual’s age Level: All Materials (per person) One large sheet of cardstock (18” x 12”) Tape One set of Braille labels for each cloud type and/or markers One small feather A layered piece of blanket or soft fabric (eight 1’ X 1” pieces) Cotton balls of varied sizes One tissue Organza or a similar material, cut into pieces, one layered 1” x 1” piece Pillow stuffing, one 1” x 1” piece A tsp of sand Three paper clips Liquid glue Scissors Baby Wipes Preparation Use tape to divide the large cardstock sheet in four sections: one for the cloud title at the top and three for the altitudes: using a portrait layout, place three pieces of tape horizontally, from side to side of the sheet. 1. 1” off the upper edge of the sheet 2. 8” off the upper edge of the sheet 1 Steps What to do and how to do it: Making A Tactile Cloud Identification Chart 1. Discuss that clouds come in three basic shapes: cirrus, stratus and cumulus. a. Feel of the 4” feather and describe it; discuss that these wispy clouds are high in the sky and are named cirrus. -

Chapter 4: Fog
CHAPTER 4: FOG Fog is a double threat to boaters. It not only reduces visibility but also distorts sound, making collisions with obstacles – including other boats – a serious hazard. 1. Introduction Fog is a low-lying cloud that forms at or near the surface of the Earth. It is made up of tiny water droplets or ice crystals suspended in the air and usually gets its moisture from a nearby body of water or the wet ground. Fog is distinguished from mist or haze only by its density. In marine forecasts, the term “fog” is used when visibility is less than one nautical mile – or approximately two kilometres. If visibility is greater than that, but is still reduced, it is considered mist or haze. It is important to note that foggy conditions are reported on land only if visibility is less than half a nautical mile (about one kilometre). So boaters may encounter fog near coastal areas even if it is not mentioned in land-based forecasts – or particularly heavy fog, if it is. Fog Caused Worst Maritime Disaster in Canadian History The worst maritime accident in Canadian history took place in dense fog in the early hours of the morning on May 29, 1914, when the Norwegian coal ship Storstadt collided with the Canadian Pacific ocean liner Empress of Ireland. More than 1,000 people died after the Liverpool-bound liner was struck in the side and sank less than 15 minutes later in the frigid waters of the St. Lawrence River near Rimouski, Quebec. The Captain of the Empress told an inquest that he had brought his ship to a halt and was waiting for the weather to clear when, to his horror, a ship emerged from the fog, bearing directly upon him from less than a ship’s length away. -
DRI Cloud Condensation Nuclei (CCN) Spectrometer Measurements
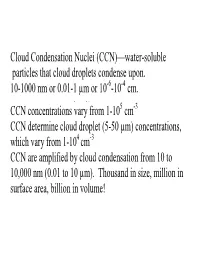
Cloud Condensation Nuclei (CCN)—water-soluble particles that cloud droplets condense upon. 10-1000 nm or 0.01-1 µm or 10-6-10-4 cm. (), CCN concentrations vary from 1-105 cm-3 CCN determine cloud droplet (5-50 µm) concentrations, which vary from 1-104 cm-3 CCN are amplified by cloud condensation from 10 to 10,000 nm (0.01 to 10 µm). Thousand in size, million in surface area, billion in volume! DRI Cloud condensation nuclei (CCN) spectrometers. Produce a field of supersaturations (S) by thermal diffusion of temperature and water vapor between two parallel plates, where cloud droplets grow on hygroscopic sample particles. More hygroscopic (e.g., larger) particles produce larger cloud droplets. Continuous flow through the cloud chamber (~30s) then into an optical particle counter (OPC). CCN spectrum is deduced from the OPC droplet spectrum. A calibration curve relates OPC droplet size to particle hygroscopicity (critical supersaturation—Sc). Calibration is done with nuclei of known composition (e.g., NaCl) and size (differential mobility analyzer—DMA— electrostatic classifier--EC). Assumes that all CCN with the same Sc regardless of composition (or size) produce the same droplet sizes. Calibration holds only if all chamber parameters (i.e., flows and temperatures) remain constant. Sc inversely proportional to number of soluble ions. Traditionally CCN plots are cumulative because clouds act cumulatively on the aerosol— all nuclei with Sc < cloud S produce “activated” cloud droplets. Also previous CCN instruments had too few data points to produce a differential spectrum. DRI CCN spectrometers have enough data points to produce differential spectra. -

Cloud Protocols W Elcome
Cloud Protocols W elcome Purpose Geography To observe the type and cover of clouds includ- The nature and extent of cloud cover ing contrails affects the characteristics of the physical geographic system. Overview Scientific Inquiry Abilities Students observe which of ten types of clouds Intr Use a Cloud Chart to classify cloud types. and how many of three types of contrails are visible and how much of the sky is covered by Estimate cloud cover. oduction clouds (other than contrails) and how much is Identify answerable questions. covered by contrails. Design and conduct scientific investigations. Student Outcomes Use appropriate mathematics to analyze Students learn how to make estimates from data. observations and how to categorize specific Develop descriptions and predictions clouds following general descriptions for the using evidence. categories. Recognize and analyze alternative explanations. Pr Students learn the meteorological concepts Communicate procedures, descriptions, otocols of cloud heights, types, and cloud cover and and predictions. learn the ten basic cloud types. Science Concepts Time 10 minutes Earth and Space Science Weather can be described by qualitative Level observations. All Weather changes from day to day and L earning A earning over the seasons. Frequency Weather varies on local, regional, and Daily within one hour of local solar noon global spatial scales. Clouds form by condensation of water In support of ozone and aerosol measure- vapor in the atmosphere. ments ctivities Clouds affect weather and climate. At the time of a satellite overpass The atmosphere has different properties Additional times are welcome. at different altitudes. Water vapor is added to the atmosphere Materials and Tools by evaporation from Earth’s surface and Atmosphere Investigation Data Sheet or transpiration from plants. -

Stratus Clouds Characteristics
•Clouds are classified mainly by their visual characteristics and height •They look different because they have different contents •3 primary types and many sub-types Stratus Cumulus Cirrus Stratus Clouds Characteristics: •Can be at any altitude – stratus just means that they form a horizontal layer •They are often at low altitude in bad weather (nimbostratus) •Fog is a stratus cloud hugging the ground •They are formed by weak, but widespread vertical motion (~10 cm/s) •The are made of a moderate density of cloud drops , LWC~.1 g/m3 •Cumulus or cirrus can also form a layer (Stratocumulus and cirrostratus) Cumulus Clouds Characteristics: •Can be at any altitude – cumulus means “heaping” •They develop more vertically than horizontally. •When they form rain they become cumulonimbus •They are formed by strong vertical motion, sometimes 25 m/s updrafts •Strong vertical motion and cumulus clouds result from free convection that comes from instability •If that vertical motion is deep enough, ice can form in upper part of the cloud •Ice crystals and strong motion -> charge separation ->lightning •They have the greatest LWC: from .5 to 4 g/m3 depending of updraft rate Cirrus Clouds Characteristics: •Are composed of tiny ice crystals, not liquid cloud drops •Usually form only when T< -25 C •They are formed by weak vertical motion (~5 cm/s) •The are made of a small density of ice crystals , IWC~.05 g/m3 •Sometimes generated by jet exhaust (contrail) •Often initiated as anvils of cumulus clouds striking the tropopause-lid •Important effects due to -

Estimation of Low Cloud Base Heights at Night from Satellite Infrared and Surface Temperature Data
ESTIMATION OF LOW CLOUD BASE HEIGHTS AT NIGHT FROM SATELLITE INFRARED AND SURFACE TEMPERATURE DATA Gary P. Ellrod Office of Research and Applications NOAA/National Environmental Satellite Data and Information Service Camp Springs, Maryland Abstract sometimes referred to as the "fog product," clearly shows low-level water clouds (fog and stratus) that may often go A nighttime low cloud image product that highlights tmdetected using only a single IR channel. Unforttmately, areas of the lowest cloud base heights has been developed low clouds are only detectable ifthey are sufficiently thick by combining brightness temperature data from the (i.e., > 50-100 m) and not overlain by higher cloud layers. Geostationary Operational Environmental SateZZite Additionally, the current nighttime low cloud product can (GOES) Imager InfraRed (fR) bands centered at 3.9 Jlm not easily distinguish clouds that may result in low ceil and 10.7 Jlm, with hourly temperatures from surface ings! and/or reduced surface visibilities from higher-based observing sites and offshore marine buoys. A dependent stratus, stratocumulus and altostratus that do not repre data sample collected during the Summer of 1997 showed sent significant hazards to aviation or marine interests. a fairly strong correlation between the surface minus cloud The likelihood that fog is present may be assessed by top IR temperature differences versus measured cloud base means of empirical rules based on satellite image fea heights. Histogram analysis indicated that a temperature tures such as: brightness, texture, growth or movement. difference of less than 4 °C related to a > 50% probability However, these niles require some expertise and experi of ceilings below 1000 ft above ground level, the threshold ence for proper application. -
The Ten Different Types of Clouds
THE COMPLETE GUIDE TO THE TEN DIFFERENT TYPES OF CLOUDS AND HOW TO IDENTIFY THEM Dedicated to those who are passionately curious, keep their heads in the clouds, and keep their eyes on the skies. And to Luke Howard, the father of cloud classification. 4 Infographic 5 Introduction 12 Cirrus 18 Cirrocumulus 25 Cirrostratus 31 Altocumulus 38 Altostratus 45 Nimbostratus TABLE OF CONTENTS TABLE 51 Cumulonimbus 57 Cumulus 64 Stratus 71 Stratocumulus 79 Our Mission 80 Extras Cloud Types: An Infographic 4 An Introduction to the 10 Different An Introduction to the 10 Different Types of Clouds Types of Clouds ⛅ Clouds are the equivalent of an ever-evolving painting in the sky. They have the ability to make for magnificent sunrises and spectacular sunsets. We’re surrounded by clouds almost every day of our lives. Let’s take the time and learn a little bit more about them! The following information is presented to you as a comprehensive guide to the ten different types of clouds and how to idenify them. Let’s just say it’s an instruction manual to the sky. Here you’ll learn about the ten different cloud types: their characteristics, how they differentiate from the other cloud types, and much more. So three cheers to you for starting on your cloud identification journey. Happy cloudspotting, friends! The Three High Level Clouds Cirrus (Ci) Cirrocumulus (Cc) Cirrostratus (Cs) High, wispy streaks High-altitude cloudlets Pale, veil-like layer High-altitude, thin, and wispy cloud High-altitude, thin, and wispy cloud streaks made of ice crystals streaks -

Climatology Climatic Zone
Climatology Climatic Zone 1320. At about what geographical latitude as average is assumed for the zone of prevailing westerlies? A) 10° N. B) 50° N. C) 80° N. D) 30° N. 1321. What is the type, intensity and seasonal variation of precipitation in the equatorial region? A) Rain showers, hail showers and thunderstorms occur the whole year, but frequency is highest during two periods: April-May and October- November. B) Precipitation is generally in the form of showers but continuous rain occurs also. The greatest intensity is in July. C) Warm fronts are common with continuous rain. The frequency is the same throughout the year D) Showers of rain or hail occur throughout the year; the frequency is highest in January. 1324. The reason for the fact, that the Icelandic low is normally deeper in winter than in summer is that: A) the strong winds of the north Atlantic in winter are favourable for the development of lows. B) the low pressure activity of the sea east of Canada is higher in winter. C) the temperature contrasts between arctic and equatorial areas are much greater in winter. D) converging air currents are of greater intensity in winter. 1328. The lowest relative humidity will be found: A) at the south pole. B) between latitudes 30 deg and 40 deg N in July. C) in equatorial regions. D) around 30 deg S in January. Tropical Climatology: 1329. Flying from Dakar to Rio de Janeiro in winter where would you cross the ITCZ? A) 7 to 120N. B) 0 to 70N. C) 7 to 120S. -
48A Clouds.Pdf
Have you ever tried predicting weather weather will be nice. When cumulus clouds by looking at clouds? It may be easier than get larger, they can form cumulonimbus you think. If low, dark clouds develop in clouds that produce thunderstorms. the sky, you might predict rain. If you see 5 Sometimes clouds fill the sky. A layer towering, dark, puffy clouds, you might of low-lying tratus clouds often produce guess a thunderstorm was forming. Clouds several days of light rain or snow. are a good indicator of weather. 2 The appearance of clouds depends on VReading Check how they form. Clouds form when air rises and cools. Because cooler air can hold less 4. Stratus clouds often produce __. water vapor, the water vapor condenses a. heavy wind and rain into droplets. The droplets gather to form b. clear, sunny skies a cloud. If the air rises q,uickly, tall clouds c. light rain or snow that produce thunderstorms might develop. If the air rises slowly, layers of clouds 6 Clouds have names that indicate their might develop. shapes as well as their altitude. The word part cirro indicates clouds high in the VReadlng Check sky. A cirrocumulus cloud, for example, is a combination of a cirrus cloud and a 2. Thunderstorms might develop if air cumulus cloud. This cloud is high in the __ quickly. sky, but it is also puffy. A storm often a. rises follows when you see rows of cirrocumulus b. warms clouds. c. spreads out 7 The word alto indicates mid-level clouds. Altocumulus clouds appear at a 3 On a clear day, you can sometimes see medium height in the sky, but they are also wispy, feathery cirrus clouds high in the puffy. -
Cumulus Clouds Cumulus Clouds Are Often Described As Puffy Clouds That Are flat on the Bottom
February 10, 2020 Cumulus Clouds Cumulus clouds are often described as puffy clouds that are flat on the bottom. Cumulus clouds often bring heavy rain or snow that doesn't last long. NOTES: • Cumulus brings brief heavy rain • Puffy clouds with flat bottoms KEY WORDS: Cumulus = Puffy February 10, 2020 Stratus Clouds Stratus clouds are often described as blanket like clouds. Stratus clouds usually brings rain or snow that is long lasting. Fog is a stratus cloud that is at ground level. NOTES: • Stratus clouds bring long lasting rain • Stratus are blanket like clouds • Fog is a stratus cloud at ground level. KEY WORDS: Stratus = Blanket February 10, 2020 Cirrus Clouds Cirrus clouds are often described as wispy, featherlike clouds. Cirrus clouds often come with clear and calm weather. NOTES: • Cirrus are wispy, featherlike • Cirrus clouds clear and calm weather • KEY WORDS: Cirrus = Wispy February 10, 2020 Rain Clouds We've learned about the other three types of clouds but what about a rain cloud. If rain or snow falls from a cloud, the term nimbo- or nimbus- is added to the clouds name. NIMBO- or NIMBUS- means "RAIN." Cumulonimbus clouds are large puffy rain clouds, THAT BRING THUNDERSTORMS. Nimbostratus clouds are blanket like rain clouds. NOTES: • Cumulonimbus puffy rain clouds bring thunderstorms • Nimbostratus blanket like rain clouds • Key Words: Nimbo/Nimbus = Rain February 10, 2020 Clouds & Weather Clouds don't just bring rain. They can have other effects on weather as well. When it is very cloudy temperatures tend to get cooler. Clouds also can make it more humid because it is trapping water vapor. -
The Clouds Outside My Window
The Clouds Outside My Window National Weather Service NOAA Updated 10/2017 The Clouds Outside My Window Written and illustrated by John Jensenius My window With help from Owlie Skywarn 1 The Clouds Outside My Window Whether I’m outdoors or just looking outside, I like to observe the clouds. Each cloud is different and has a different story to tell. In this book, I’ll explain some of the basic cloud types and show you some of the clouds I’ve observed outside my window at the National Weather Service Office in Gray, Maine. I hope this book will encourage you to observe the sky. You may want to take pictures outside your home or school and make a book of your own. If you do, let me know, so I can see the clouds outside your window. -- John Jensenius Meteorologist 2 National Weather Service A Look Out My Window Here’s a look out my window. My office is located across the street from the Pineland Farms Equestrian Center which you’ll see in many of the cloud pictures. (The black silhouette of the hawk keeps birds from flying into my reflective windows) 3 What are clouds made of ? High in the atmosphere where temperatures are very, very cold, most clouds are made of tiny ice crystals. Closer to the ground, the clouds that we see are made of tiny water droplets. 4 How do clouds form? In general, there are two ways clouds form. In both cases, though, the clouds form because the air is cooling. In the atmosphere, rising air cools and sinking air warms.