Geological Analysis of Martian Rover‐Derived Digital Outcrop Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Planetary Geologic Mappers Annual Meeting
Program Lunar and Planetary Institute 3600 Bay Area Boulevard Houston TX 77058-1113 Planetary Geologic Mappers Annual Meeting June 12–14, 2018 • Knoxville, Tennessee Institutional Support Lunar and Planetary Institute Universities Space Research Association Convener Devon Burr Earth and Planetary Sciences Department, University of Tennessee Knoxville Science Organizing Committee David Williams, Chair Arizona State University Devon Burr Earth and Planetary Sciences Department, University of Tennessee Knoxville Robert Jacobsen Earth and Planetary Sciences Department, University of Tennessee Knoxville Bradley Thomson Earth and Planetary Sciences Department, University of Tennessee Knoxville Abstracts for this meeting are available via the meeting website at https://www.hou.usra.edu/meetings/pgm2018/ Abstracts can be cited as Author A. B. and Author C. D. (2018) Title of abstract. In Planetary Geologic Mappers Annual Meeting, Abstract #XXXX. LPI Contribution No. 2066, Lunar and Planetary Institute, Houston. Guide to Sessions Tuesday, June 12, 2018 9:00 a.m. Strong Hall Meeting Room Introduction and Mercury and Venus Maps 1:00 p.m. Strong Hall Meeting Room Mars Maps 5:30 p.m. Strong Hall Poster Area Poster Session: 2018 Planetary Geologic Mappers Meeting Wednesday, June 13, 2018 8:30 a.m. Strong Hall Meeting Room GIS and Planetary Mapping Techniques and Lunar Maps 1:15 p.m. Strong Hall Meeting Room Asteroid, Dwarf Planet, and Outer Planet Satellite Maps Thursday, June 14, 2018 8:30 a.m. Strong Hall Optional Field Trip to Appalachian Mountains Program Tuesday, June 12, 2018 INTRODUCTION AND MERCURY AND VENUS MAPS 9:00 a.m. Strong Hall Meeting Room Chairs: David Williams Devon Burr 9:00 a.m. -
The IRM the Iron That Binds: the Unexpectedly Strong Magnetism Of
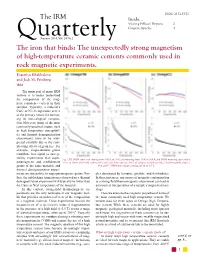
ISSN: 2152-1972 The IRM Inside... Visiting Fellows' Reports 2 Current Articles 4 QuarterlySummer 2014, Vol. 24 No.2 The iron that binds: The unexpectedly strong magnetism of high-temperature ceramic cements commonly used in rock magnetic experiments. Evgeniya Khakhalova and Josh M. Feinberg IRM The main goal of many IRM visitors is to better understand the composition of the mag- netic remanence carriers in their samples. Typically, a material’s Curie or Néel temperature serves as the primary means for estimat- ing its mineralogical composi- tion. However, many of the most commonly used techniques, such as high temperature susceptibil- ity and thermal demagnetization experiments, have to be inter- preted carefully due to the com- plicating effects of grain size. For example, single-domain grains contribute less signal to suscep- tibility experiments than super- Fig 1. RT SIRM curves on cooling from 300 K to 10 K and warming from 10 K to 300 K and SIRM warming curves from paramagnetic and multidomain 10 K to 300 K after field-cooling (FC) and zero-field-cooling (ZFC) of samples (a) Omega700_3, (b) Omega600, and (c) grains of the same material, and OmegaCC. SIRM was imparted using a field of 2.5 T. thermal demagnetization experi- ments are insensitive to superparamagnetic grains. Fur- ples dominated by hematite, goethite, and ferrihydrite). ther, the unblocking temperatures observed in a thermal In these instances, any source of magnetic contamination demagnetization experiment will typically be lower than in a strong-field thermomagnetic experiment can lead to the Curie or Néel temperature of the material. an incorrect interpretation of a sample’s magnetic miner- In this context, strong-field thermomagnetic ex- alogy. -

Planetary Report Report
The PLANETARYPLANETARY REPORT REPORT Volume XXIX Number 1 January/February 2009 Beyond The Moon From The Editor he Internet has transformed the way science is On the Cover: Tdone—even in the realm of “rocket science”— The United States has the opportunity to unify and inspire the and now anyone can make a real contribution, as world’s spacefaring nations to create a future brightened by long as you have the will to give your best. new goals, such as the human exploration of Mars and near- In this issue, you’ll read about a group of amateurs Earth asteroids. Inset: American astronaut Peggy A. Whitson who are helping professional researchers explore and Russian cosmonaut Yuri I. Malenchenko try out training Mars online, encouraged by Mars Exploration versions of Russian Orlan spacesuits. Background: The High Rovers Project Scientist Steve Squyres and Plane- Resolution Camera on Mars Express took this snapshot of tary Society President Jim Bell (who is also head Candor Chasma, a valley in the northern part of Valles of the rovers’ Pancam team.) Marineris, on July 6, 2006. Images: Gagarin Cosmonaut Training This new Internet-enabled fun is not the first, Center. Background: ESA nor will it be the only, way people can participate in planetary exploration. The Planetary Society has been encouraging our members to contribute Background: their minds and energy to science since 1984, A dust storm blurs the sky above a volcanic caldera in this image when the Pallas Project helped to determine the taken by the Mars Color Imager on Mars Reconnaissance Orbiter shape of a main-belt asteroid. -

Outstanding 1977 Ames Achievements
NationalAeronaubcs and SpaceAd m i n istration Ames ResearchCenter MolfettField, California 94035 VOLUME XX NUMBER 5 January 12, 1978 Outstanding 1977 Ames Achievements AERONAUTICS A laborator5investigation of cockpitJnstrumenta~ navigationMability, requiting only a few minutesel !ionusing etectr<micdisplays with touch-sensitive warm-upand aIignmenttime priorto takeofT. SpaceShuttle tests overlayshas demonstratedthai this type of tech- nolo~’ can significantlysimplify the interface Space Shuttletests accounted[or about25 ~; of the betweenthe pilot and advancedavionic system for For the first time simulatorsat Ames and FAA’s (Y t977 Aerodynamics Division wind tLmnel GeneralAviation applications. AdditionaIly, voice NationalAviation Facilities Experimental Center occupancy.Over tile past Five ~ears. more than leedbackusing compu’ter-generatedvoice has been {NAFEC)in AtlanticCIte,, N.J.. jointly participated 12,000hours of occupancyha~,e been devolt~dto lotlI~dto be effectivein alertingthe pi~ot of errone- it~ an experimentto e~aluatese~era} termina] area the SpaceShvatti¢. which amounts Io ab,,)u*25":; ol ous data entryThe~e concepts wiIl be flight-tested operationaliechniqtle~, lor fuelconservation. In the thetotal shttttJe wind tit]reel teal program. m lhe Cessna402B dtaring the earl}:part of 1978 experiment,two piloted simulatorsat Ames were flo~n Mmuftaneou~l.~uitt~ an elaborateair tralfic A colnpu~ercode has been developedfor compres- controlsimulation at NAFEC by means of a trans- sible,subsl~nic flo’~. ~hich permits inve>tigating MLS conlinenta]~o~ce and data }ink. The experimei’~t tunnelwall Iilldnterferencefor wind lnnne/swith ~erifiedthe fuel sa~ingspotential of the new pro- non-homogenot~sporous or -dottedboundarie ~, The Amesha:, played a ~,ewimportant role in the e~alu- cedure,,under typicalhiNs-densit!.’ air traffic codeis l~eingused ~o investigatethe of!eats el model ation of lhe proposedNational Microwave Landing condition:,. -

Investigating Swirl and Tumble Flow with a Comparison of Visualization Techniques
Investigating Swirl and Tumble Flow with a Comparison of Visualization Techniques Robert S. Laramee∗ Daniel Weiskopf§ Jurgen¨ Schneider¶ Helwig Hauser∗ VRVis Research Center, VIS, University of Stuttgart AVL, Graz VRVis Research Center, Vienna Vienna Figure 1: Visualization of swirl and tumble flow using a combination of direct color-mapping, streamlines, isosurfaces, texture-based flow vi- sualization and slicing. (Left) visualizing swirl flow using 3D streamlines and texture-based flow visualization on an isosurface, (middle-left) a clipping plane is applied to reveal occluded flow structures, (middle-right) an isosurface and 3D streamlines visualize tumble motion, and (right) the addition of texture-based flow visualization on a color-mapped slice. ABSTRACT simulation results. AVL’s own engineers as well as engineers at We investigate two important, common fluid flow patterns from industry affiliates use visualization software to analyze and evaluate computational fluid dynamics (CFD) simulations, namely, swirl the results of their automotive design and simulation. and tumble motion typical of automotive engines. We study and Previously, AVL engineers used a series of several color-mapped visualize swirl and tumble flow using three different flow visual- slices to assess and visualize the results of their CFD simulations. ization techniques: direct, geometric, and texture-based. When Isosurfaces were used less commonly to assess certain 3D features illustrating these methods side-by-side, we describe the relative that could not be investigated sufficiently with 2D slices. Recently, strengths and weaknesses of each approach within a specific spatial new solutions for the visualization of CFD simulation data have dimension and across multiple spatial dimensions typical of an en- been introduced. -

Martian Crater Morphology
ANALYSIS OF THE DEPTH-DIAMETER RELATIONSHIP OF MARTIAN CRATERS A Capstone Experience Thesis Presented by Jared Howenstine Completion Date: May 2006 Approved By: Professor M. Darby Dyar, Astronomy Professor Christopher Condit, Geology Professor Judith Young, Astronomy Abstract Title: Analysis of the Depth-Diameter Relationship of Martian Craters Author: Jared Howenstine, Astronomy Approved By: Judith Young, Astronomy Approved By: M. Darby Dyar, Astronomy Approved By: Christopher Condit, Geology CE Type: Departmental Honors Project Using a gridded version of maritan topography with the computer program Gridview, this project studied the depth-diameter relationship of martian impact craters. The work encompasses 361 profiles of impacts with diameters larger than 15 kilometers and is a continuation of work that was started at the Lunar and Planetary Institute in Houston, Texas under the guidance of Dr. Walter S. Keifer. Using the most ‘pristine,’ or deepest craters in the data a depth-diameter relationship was determined: d = 0.610D 0.327 , where d is the depth of the crater and D is the diameter of the crater, both in kilometers. This relationship can then be used to estimate the theoretical depth of any impact radius, and therefore can be used to estimate the pristine shape of the crater. With a depth-diameter ratio for a particular crater, the measured depth can then be compared to this theoretical value and an estimate of the amount of material within the crater, or fill, can then be calculated. The data includes 140 named impact craters, 3 basins, and 218 other impacts. The named data encompasses all named impact structures of greater than 100 kilometers in diameter. -

Discovery of Silica-Rich Deposits on Mars by the Spirit Rover
Ancient Aqueous Environments at Endeavour Crater, Mars Authors: R.E. Arvidson1, S.W. Squyres2, J.F. Bell III3, J. G. Catalano1, B.C. Clark4, L.S. Crumpler5, P.A. de Souza Jr.6, A.G. Fairén2, W.H. Farrand4, V.K. Fox1, R. Gellert7, A. Ghosh8, M.P. Golombek9, J.P. Grotzinger10, E. A. Guinness1, K. E. Herkenhoff11, B. L. Jolliff1, A. H. Knoll12, R. Li13, S.M. McLennan14,D. W. Ming15, D.W. Mittlefehldt15, J.M. Moore16, R. V. Morris15, S. L. Murchie17, T.J. Parker9, G. Paulsen18, J.W. Rice19, S.W. Ruff3, M. D. Smith20, M. J. Wolff4 Affiliations: 1 Dept. Earth and Planetary Sci., Washington University in Saint Louis, St. Louis, MO, 63130, USA. 2 Dept. Astronomy, Cornell University, Ithaca, NY, 14853, USA. 3 School of Earth and Space Exploration, Arizona State University, Tempe, AZ 85287, USA. 4Space Science Institute, Boulder, CO 80301, USA. 5 New Mexico Museum of Natural History & Science, Albuquerque, NM 87104, USA. 6 CSIRO Computational Informatics, Hobart 7001 TAS, Australia. 7 Department of Physics, University of Guelph, Guelph, ON, N1G 2W1, Canada. 8 Tharsis Inc., Gaithersburg MD 20877, USA. 9 Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109, USA. 10 Division of Geological and Planetary Sciences, Caltech, Pasadena, CA 91125, USA. 11 U.S. Geological Survey, Astrogeology Science Center, Flagstaff, AZ 86001, USA. 12 Botanical Museum, Harvard University, Cambridge MA 02138, USA. 13 Dept. of Civil & Env. Eng. & Geodetic Science, Ohio State University, Columbus, OH 43210, USA. 14 Dept. of Geosciences, State University of New York, Stony Brook, NY 11794, USA. -

EROSION and BASIN MODIFICATION of SMALLER COMPLEX CRATERS in the ISIDIS REGION, MARS. J.A. Mclaughlin1 and A.K. Davatzes2, 1Temp
Lunar and Planetary Science XLVIII (2017) 1190.pdf EROSION AND BASIN MODIFICATION OF SMALLER COMPLEX CRATERS IN THE ISIDIS REGION, MARS. J.A. McLaughlin1 and A.K. Davatzes2, 1Temple University, [email protected], 2Temple University, [email protected]. Introduction: Crater erosion and morphology are Level of Degradation (LOD) was defined for each indicators of the climatic and erosional history of the crater using depth to diameter ratios (d/D) and percent- area in which the crater is found [1][2]. Here we pre- age of crater rim remaining. This categorizes craters sent a detailed analysis of crater erosion and morphol- into four types; 1 is the least degraded and 4 is the ogy in the Isidis Planitia Basin region. The goal of this most degraded. Criteria are based on the following: work is to produce a thorough database of crater prop- erties and document the modification processes that dominate locally and regionally. Crater degradation, age, and geomorphology are all considered and cross- correlated to narrow down the timing and dominance of persistent fluvial, lacustrine, and volcanic processes Floor features are complex and variable, but struc- on Mars. These geologic processes modify the crater tures indicative of the following processes were identi- rims and floor, often in distinguishable ways that pro- fied: Volcanic, Aeolian, Impact, Glacial, Mass Wast- vide insight into past environmental conditions. These ing, and Water Interaction. When possible, percent environments may hold clues to past habitable envi- floor cover of features such as lava flows, mass wast- ronments that are of particular interest for future mis- ing, dune and dust coverage were documented. -

A Unified Plane Coordinate Reference System
This dissertation has been microfilmed exactly as received COLVOCORESSES, Alden Partridge, 1918- A UNIFIED PLANE COORDINATE REFERENCE SYSTEM. The Ohio State University, Ph.D., 1965 Geography University Microfilms, Inc., Ann Arbor, Michigan A UNIFIED PLANE COORDINATE REFERENCE SYSTEM DISSERTATION Presented in Partial Fulfillment of the Requirements for The Degree Doctor of Philosophy in the Graduate School of The Ohio State University Alden P. Colvocoresses, B.S., M.Sc. Lieutenant Colonel, Corps of Engineers United States Army * * * * * The Ohio State University 1965 Approved by Adviser Department of Geodetic Science PREFACE This dissertation was prepared while the author was pursuing graduate studies at The Ohio State University. Although attending school under order of the United States Army, the views and opinions expressed herein represent solely those of the writer. A list of individuals and agencies contributing to this paper is presented as Appendix B. The author is particularly indebted to two organizations, The Ohio State University and the Army Map Service. Without the combined facilities of these two organizations the preparation of this paper could not have been accomplished. Dr. Ivan Mueller of the Geodetic Science Department of The Ohio State University served as adviser and provided essential guidance and counsel. ii VITA September 23, 1918 Born - Humboldt, Arizona 1941 oo.oo.o BoS. in Mining Engineering, University of Arizona 1941-1945 .... Military Service, European Theatre 1946-1950 o . o Mining Engineer, Magma Copper -

Operation and Performance of the Mars Exploration Rover Imaging System on the Martian Surface
Operation and Performance of the Mars Exploration Rover Imaging System on the Martian Surface Justin N. Maki Jet Propulsion Laboratory California Institute of Technology Pasadena, CA USA [email protected] Todd Litwin, Mark Schwochert Jet Propulsion Laboratory California Institute of Technology Pasadena, CA USA Ken Herkenhoff United States Geological Survey Flagstaff, AZ USA Abstract - The Imaging System on the Mars Exploration Rovers has successfully operated on the surface of Mars for over one Earth year. The acquisition of hundreds of panoramas and tens of thousands of stereo pairs has enabled the rovers to explore Mars at a level of detail unprecedented in the history of space exploration. In addition to providing scientific value, the images also play a key role in the daily tactical operation of the rovers. The mobile nature of the MER surface mission requires extensive use of the imaging system for traverse planning, rover localization, remote sensing instrument targeting, and robotic arm placement. Each of these activity types requires a different set of data compression rates, surface Figure 1. The Mars Exploration Spirit Rover, as viewed by coverage, and image acquisition strategies. An overview the Navcam shortly after lander egress early in the mission. of the surface imaging activities is provided, along with a presents an overview of the operation and performance of summary of the image data acquired to date. the MER Imaging System. Keywords: Imaging system, cameras, rovers, Mars, 1.2 Imaging System Design operations. The MER cameras are classified into five types: Descent cameras, Navigation cameras (Navcam), Hazard Avoidance 1 Introduction cameras (Hazcam), Panoramic cameras (Pancam), and Microscopic Imager (MI) cameras. -

A Retrospective Snapshot of the Planning Processes in MER Operations After 5 Years
A Retrospective Snapshot of the Planning Processes in MER Operations After 5 Years Anthony Barrett, Deborah Bass, Sharon Laubach, and Andrew Mishkin Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive M/S 301-260 {firstname.lastname}@jpl.nasa.gov Abstract Over the past five years on Mars, the Mars Exploration Rovers have traveled over 20 kilometers to climb tall hills and descend into craters. Over that period the operations process has continued to evolve as deep introspection by the MER uplink team suggests streamlining improvements and lessons learned adds complexity to handle new problems. As such, the operations process and its supporting tools automate enough of the drudgery to circumvent staff burnout issues while being nimble and safe enough to let an operations staff respond to the problems that Mars throws up on a daily basis. This paper describes the currently used integrated set of planning processes that support rover operations on a daily basis after five years of evolution. Figure 1. Mars Exploration Rover For communications, each rover has a high gain antenna Introduction for receiving instructions from Earth, and a low gain On January 3 & 24, 2004 Spirit and Opportunity, the twin antenna for transmitting data to the Odyssey or Mars Mars Exploration Rovers (MER), landed on opposite sides Reconnaissance orbiters with subsequent relay to Earth. of Mars at Gusev Crater and Meridiani Planum Given that it takes between 6 and 44 minutes for a signal to respectively. Each rover was originally expected to last 90 travel to and from the rovers, simple joystick operations Sols (Martian days) due to dust accumulation on the solar are not feasible. -

The Pancam Instrument for the Exomars Rover
ASTROBIOLOGY ExoMars Rover Mission Volume 17, Numbers 6 and 7, 2017 Mary Ann Liebert, Inc. DOI: 10.1089/ast.2016.1548 The PanCam Instrument for the ExoMars Rover A.J. Coates,1,2 R. Jaumann,3 A.D. Griffiths,1,2 C.E. Leff,1,2 N. Schmitz,3 J.-L. Josset,4 G. Paar,5 M. Gunn,6 E. Hauber,3 C.R. Cousins,7 R.E. Cross,6 P. Grindrod,2,8 J.C. Bridges,9 M. Balme,10 S. Gupta,11 I.A. Crawford,2,8 P. Irwin,12 R. Stabbins,1,2 D. Tirsch,3 J.L. Vago,13 T. Theodorou,1,2 M. Caballo-Perucha,5 G.R. Osinski,14 and the PanCam Team Abstract The scientific objectives of the ExoMars rover are designed to answer several key questions in the search for life on Mars. In particular, the unique subsurface drill will address some of these, such as the possible existence and stability of subsurface organics. PanCam will establish the surface geological and morphological context for the mission, working in collaboration with other context instruments. Here, we describe the PanCam scientific objectives in geology, atmospheric science, and 3-D vision. We discuss the design of PanCam, which includes a stereo pair of Wide Angle Cameras (WACs), each of which has an 11-position filter wheel and a High Resolution Camera (HRC) for high-resolution investigations of rock texture at a distance. The cameras and electronics are housed in an optical bench that provides the mechanical interface to the rover mast and a planetary protection barrier.