Of Curiosity in Gale Crater, and Other Landed Mars Missions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The IRM the Iron That Binds: the Unexpectedly Strong Magnetism Of
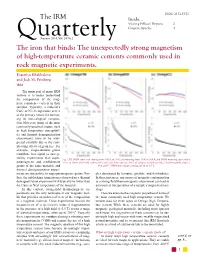
ISSN: 2152-1972 The IRM Inside... Visiting Fellows' Reports 2 Current Articles 4 QuarterlySummer 2014, Vol. 24 No.2 The iron that binds: The unexpectedly strong magnetism of high-temperature ceramic cements commonly used in rock magnetic experiments. Evgeniya Khakhalova and Josh M. Feinberg IRM The main goal of many IRM visitors is to better understand the composition of the mag- netic remanence carriers in their samples. Typically, a material’s Curie or Néel temperature serves as the primary means for estimat- ing its mineralogical composi- tion. However, many of the most commonly used techniques, such as high temperature susceptibil- ity and thermal demagnetization experiments, have to be inter- preted carefully due to the com- plicating effects of grain size. For example, single-domain grains contribute less signal to suscep- tibility experiments than super- Fig 1. RT SIRM curves on cooling from 300 K to 10 K and warming from 10 K to 300 K and SIRM warming curves from paramagnetic and multidomain 10 K to 300 K after field-cooling (FC) and zero-field-cooling (ZFC) of samples (a) Omega700_3, (b) Omega600, and (c) grains of the same material, and OmegaCC. SIRM was imparted using a field of 2.5 T. thermal demagnetization experi- ments are insensitive to superparamagnetic grains. Fur- ples dominated by hematite, goethite, and ferrihydrite). ther, the unblocking temperatures observed in a thermal In these instances, any source of magnetic contamination demagnetization experiment will typically be lower than in a strong-field thermomagnetic experiment can lead to the Curie or Néel temperature of the material. an incorrect interpretation of a sample’s magnetic miner- In this context, strong-field thermomagnetic ex- alogy. -

The Rock Abrasion Record at Gale Crater: Mars Science Laboratory
PUBLICATIONS Journal of Geophysical Research: Planets RESEARCH ARTICLE The rock abrasion record at Gale Crater: Mars 10.1002/2013JE004579 Science Laboratory results from Bradbury Special Section: Landing to Rocknest Results from the first 360 Sols of the Mars Science Laboratory N. T. Bridges1, F. J. Calef2, B. Hallet3, K. E. Herkenhoff4, N. L. Lanza5, S. Le Mouélic6, C. E. Newman7, Mission: Bradbury Landing D. L. Blaney2,M.A.dePablo8,G.A.Kocurek9, Y. Langevin10,K.W.Lewis11, N. Mangold6, through Yellowknife Bay S. Maurice12, P.-Y. Meslin12,P.Pinet12,N.O.Renno13,M.S.Rice14, M. E. Richardson7,V.Sautter15, R. S. Sletten3,R.C.Wiens6, and R. A. Yingst16 Key Points: • Ventifacts in Gale Crater 1Applied Physics Laboratory, Laurel, Maryland, USA, 2Jet Propulsion Laboratory, Pasadena, California, USA, 3Department • Maybeformedbypaleowind of Earth and Space Sciences, College of the Environments, University of Washington, Seattle, Washington, USA, 4U.S. • Can see abrasion textures at range 5 6 of scales Geological Survey, Flagstaff, Arizona, USA, Los Alamos National Laboratory, Los Alamos, New Mexico, USA, LPGNantes, UMR 6112, CNRS/Université de Nantes, Nantes, France, 7Ashima Research, Pasadena, California, USA, 8Universidad de Alcala, Madrid, Spain, 9Department of Geological Sciences, Jackson School of Geosciences, University of Texas at Austin, Supporting Information: Austin, Texas, USA, 10Institute d’Astrophysique Spatiale, Université Paris-Sud, Orsay, France, 11Department of • Figure S1 12 fi • Figure S2 Geosciences, Princeton University, Princeton, New Jersey, USA, Centre National de la Recherche Scienti que, Institut 13 • Table S1 de Recherche en Astrophysique et Planétologie, CNRS-Université Toulouse, Toulouse, France, Department of Atmospheric, Oceanic, and Space Science; College of Engineering, University of Michigan, Ann Arbor, Michigan, USA, Correspondence to: 14Division of Geological and Planetary Sciences, California Institute of Technology, Pasadena, California, USA, 15Lab N. -

Planetary Report Report
The PLANETARYPLANETARY REPORT REPORT Volume XXIX Number 1 January/February 2009 Beyond The Moon From The Editor he Internet has transformed the way science is On the Cover: Tdone—even in the realm of “rocket science”— The United States has the opportunity to unify and inspire the and now anyone can make a real contribution, as world’s spacefaring nations to create a future brightened by long as you have the will to give your best. new goals, such as the human exploration of Mars and near- In this issue, you’ll read about a group of amateurs Earth asteroids. Inset: American astronaut Peggy A. Whitson who are helping professional researchers explore and Russian cosmonaut Yuri I. Malenchenko try out training Mars online, encouraged by Mars Exploration versions of Russian Orlan spacesuits. Background: The High Rovers Project Scientist Steve Squyres and Plane- Resolution Camera on Mars Express took this snapshot of tary Society President Jim Bell (who is also head Candor Chasma, a valley in the northern part of Valles of the rovers’ Pancam team.) Marineris, on July 6, 2006. Images: Gagarin Cosmonaut Training This new Internet-enabled fun is not the first, Center. Background: ESA nor will it be the only, way people can participate in planetary exploration. The Planetary Society has been encouraging our members to contribute Background: their minds and energy to science since 1984, A dust storm blurs the sky above a volcanic caldera in this image when the Pallas Project helped to determine the taken by the Mars Color Imager on Mars Reconnaissance Orbiter shape of a main-belt asteroid. -

Chemical Variations in Yellowknife Bay Formation Sedimentary Rocks Analyzed by Chemcam on Board the Curiosity Rover on Mars N
Chemical variations in Yellowknife Bay formation sedimentary rocks analyzed by ChemCam on board the Curiosity rover on Mars N. Mangold, O. Forni, G. Dromart, K. Stack, R. C. Wiens, O. Gasnault, D. Y. Sumner, M. Nachon, P. -Y. Meslin, R. B. Anderson, et al. To cite this version: N. Mangold, O. Forni, G. Dromart, K. Stack, R. C. Wiens, et al.. Chemical variations in Yel- lowknife Bay formation sedimentary rocks analyzed by ChemCam on board the Curiosity rover on Mars. Journal of Geophysical Research. Planets, Wiley-Blackwell, 2015, 120 (3), pp.452-482. 10.1002/2014JE004681. hal-01281801 HAL Id: hal-01281801 https://hal.univ-lorraine.fr/hal-01281801 Submitted on 12 Apr 2021 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. PUBLICATIONS Journal of Geophysical Research: Planets RESEARCH ARTICLE Chemical variations in Yellowknife Bay formation 10.1002/2014JE004681 sedimentary rocks analyzed by ChemCam Special Section: on board the Curiosity rover on Mars Results from the first 360 Sols of the Mars Science Laboratory N. Mangold1, O. Forni2, G. Dromart3, K. Stack4, R. C. Wiens5, O. Gasnault2, D. Y. Sumner6, M. Nachon1, Mission: Bradbury Landing P.-Y. -

THE MARS 2020 ROVER ENGINEERING CAMERAS. J. N. Maki1, C
51st Lunar and Planetary Science Conference (2020) 2663.pdf THE MARS 2020 ROVER ENGINEERING CAMERAS. J. N. Maki1, C. M. McKinney1, R. G. Willson1, R. G. Sellar1, D. S. Copley-Woods1, M. Valvo1, T. Goodsall1, J. McGuire1, K. Singh1, T. E. Litwin1, R. G. Deen1, A. Cul- ver1, N. Ruoff1, D. Petrizzo1, 1Jet Propulsion Laboratory, California Institute of Technology (4800 Oak Grove Drive, Pasadena, CA 91109, [email protected]). Introduction: The Mars 2020 Rover is equipped pairs (the Cachecam, a monoscopic camera, is an ex- with a neXt-generation engineering camera imaging ception). The Mars 2020 engineering cameras are system that represents a significant upgrade over the packaged into a single, compact camera head (see fig- previous Navcam/Hazcam cameras flown on MER and ure 1). MSL [1,2]. The Mars 2020 engineering cameras ac- quire color images with wider fields of view and high- er angular/spatial resolution than previous rover engi- neering cameras. Additionally, the Mars 2020 rover will carry a new camera type dedicated to sample op- erations: the Cachecam. History: The previous generation of Navcams and Hazcams, known collectively as the engineering cam- eras, were designed in the early 2000s as part of the Mars Exploration Rover (MER) program. A total of Figure 1. Flight Navcam (left), Flight Hazcam (middle), 36 individual MER-style cameras have flown to Mars and flight Cachecam (right). The Cachecam optical assem- on five separate NASA spacecraft (3 rovers and 2 bly includes an illuminator and fold mirror. landers) [1-6]. The MER/MSL cameras were built in two separate production runs: the original MER run Each of the Mars 2020 engineering cameras utilize a (2003) and a second, build-to-print run for the Mars 20 megapixel OnSemi (CMOSIS) CMOS sensor Science Laboratory (MSL) mission in 2008. -

Operation and Performance of the Mars Exploration Rover Imaging System on the Martian Surface
Operation and Performance of the Mars Exploration Rover Imaging System on the Martian Surface Justin N. Maki Jet Propulsion Laboratory California Institute of Technology Pasadena, CA USA [email protected] Todd Litwin, Mark Schwochert Jet Propulsion Laboratory California Institute of Technology Pasadena, CA USA Ken Herkenhoff United States Geological Survey Flagstaff, AZ USA Abstract - The Imaging System on the Mars Exploration Rovers has successfully operated on the surface of Mars for over one Earth year. The acquisition of hundreds of panoramas and tens of thousands of stereo pairs has enabled the rovers to explore Mars at a level of detail unprecedented in the history of space exploration. In addition to providing scientific value, the images also play a key role in the daily tactical operation of the rovers. The mobile nature of the MER surface mission requires extensive use of the imaging system for traverse planning, rover localization, remote sensing instrument targeting, and robotic arm placement. Each of these activity types requires a different set of data compression rates, surface Figure 1. The Mars Exploration Spirit Rover, as viewed by coverage, and image acquisition strategies. An overview the Navcam shortly after lander egress early in the mission. of the surface imaging activities is provided, along with a presents an overview of the operation and performance of summary of the image data acquired to date. the MER Imaging System. Keywords: Imaging system, cameras, rovers, Mars, 1.2 Imaging System Design operations. The MER cameras are classified into five types: Descent cameras, Navigation cameras (Navcam), Hazard Avoidance 1 Introduction cameras (Hazcam), Panoramic cameras (Pancam), and Microscopic Imager (MI) cameras. -

A Retrospective Snapshot of the Planning Processes in MER Operations After 5 Years
A Retrospective Snapshot of the Planning Processes in MER Operations After 5 Years Anthony Barrett, Deborah Bass, Sharon Laubach, and Andrew Mishkin Jet Propulsion Laboratory California Institute of Technology 4800 Oak Grove Drive M/S 301-260 {firstname.lastname}@jpl.nasa.gov Abstract Over the past five years on Mars, the Mars Exploration Rovers have traveled over 20 kilometers to climb tall hills and descend into craters. Over that period the operations process has continued to evolve as deep introspection by the MER uplink team suggests streamlining improvements and lessons learned adds complexity to handle new problems. As such, the operations process and its supporting tools automate enough of the drudgery to circumvent staff burnout issues while being nimble and safe enough to let an operations staff respond to the problems that Mars throws up on a daily basis. This paper describes the currently used integrated set of planning processes that support rover operations on a daily basis after five years of evolution. Figure 1. Mars Exploration Rover For communications, each rover has a high gain antenna Introduction for receiving instructions from Earth, and a low gain On January 3 & 24, 2004 Spirit and Opportunity, the twin antenna for transmitting data to the Odyssey or Mars Mars Exploration Rovers (MER), landed on opposite sides Reconnaissance orbiters with subsequent relay to Earth. of Mars at Gusev Crater and Meridiani Planum Given that it takes between 6 and 44 minutes for a signal to respectively. Each rover was originally expected to last 90 travel to and from the rovers, simple joystick operations Sols (Martian days) due to dust accumulation on the solar are not feasible. -
2020 Crew Health & Performance EVA Roadmap
NASA/TP-20205007604 Crew Health and Performance Extravehicular Activity Roadmap: 2020 Andrew F. J. Abercromby1 Omar Bekdash4 J. Scott Cupples1 Jocelyn T. Dunn4 E. Lichar Dillon2 Alejandro Garbino3 Yaritza Hernandez4 Alexandros D. Kanelakos1 Christine Kovich5 Emily Matula6 Matthew J. Miller7 James Montalvo6 Jason Norcross4 Cameron W. Pittman7 Sudhakar Rajulu1 Richard A. Rhodes1 Linh Vu8 1NASA Johnson Space Center, Houston, Texas 2University of Texas Medical Branch, Galveston, Texas 3GeoControl Systems Inc., Houston, Texas 4KBR, Houston, Texas 5The Aerospace Corporation, Houston, Texas 6Stinger Ghaffarian Technologies (SGT) Inc., Houston, Texas 7Jacobs Technology, Inc., Houston, Texas 8MEI Technologies, Inc., Houston, Texas National Aeronautics and Space Administration Johnson Space Center Houston, Texas 77058 October 2020 The NASA STI Program Office ... in Profile Since its founding, NASA has been dedicated to the • CONFERENCE PUBLICATION. advancement of aeronautics and space science. The Collected papers from scientific and NASA scientific and technical information (STI) technical conferences, symposia, seminars, program plays a key part in helping NASA or other meetings sponsored or maintain this important role. co-sponsored by NASA. The NASA STI program operates under the • SPECIAL PUBLICATION. Scientific, auspices of the Agency Chief Information Officer. technical, or historical information from It collects, organizes, provides for archiving, and NASA programs, projects, and missions, disseminates NASA’s STI. The NASA STI often concerned with subjects having program provides access to the NTRS Registered substantial public interest. and its public interface, the NASA Technical Report Server, thus providing one of the largest • TECHNICAL TRANSLATION. collections of aeronautical and space science STI in English-language translations of foreign the world. Results are published in both non-NASA scientific and technical material pertinent to channels and by NASA in the NASA STI Report NASA’s mission. -

The Mars Science Laboratory (Msl) Navigation Cameras (Navcams)
42nd Lunar and Planetary Science Conference (2011) 2738.pdf THE MARS SCIENCE LABORATORY (MSL) NAVIGATION CAMERAS (NAVCAMS). J. N. Maki1, D. Thiessen1, A.Pourangi1, P. Kobzeff1, L. Scherr1, T. Elliott1, A. Dingizian1, Beverly St. Ange1, 1Jet Propulsion La- boratory/California Institute of Technology, 4800 Oak Grove Drive, Pasadena, CA 91109. Introduction: The Mars Science Laboratory (MSL) The camera plate, which also holds the Mastcam and Rover (scheduled for launch in November/December Chemcam instruments, is mounted to a 0.85-meter 2011) will fly four Navigation Cameras (Navcams). high Remote Sensing Mast (RSM), which points the The key requirements of the Navcam imaging system cameras in the azimuth and elevation directions. The are: 1) provide terrain context for traverse planning RSM is attached to the rover deck, which is 1.1 meters and Mastcam/Chemcam pointing, 2) provide a 360- above the nominal surface. The resultant configura- degree field of regard at <1 mrad/pixel angular resolu- tion places the Navcams 1.9 meters above the Martian tion, 3) provide stereo ranging data out to 100 m, and surface (0.4 meters higher than the MER Navcams). 4) use of a broadband, visible filter. The Navcams The MSL Navcams are build-to-print copies were built at the Jet Propulsion Laboratory in Pasade- of the Mars Exploration Rover (MER) cameras, which na, CA. are described in detail in [1]. The main difference Instrument Details: The mounting locations of the between the MER and MSL cameras is that the MSL Navcams are shown in figure 1. Navcams have slightly more powerful heaters to allow operation at colder ambient temperatures. -

The Mars Science Laboratory Engineering Cameras
Space Sci Rev DOI 10.1007/s11214-012-9882-4 The Mars Science Laboratory Engineering Cameras J. Maki · D. Thiessen · A. Pourangi · P. Kobzeff · T. Litwin · L. Scherr · S. Elliott · A. Dingizian · M. Maimone Received: 21 December 2011 / Accepted: 5 April 2012 © Springer Science+Business Media B.V. 2012 Abstract NASA’s Mars Science Laboratory (MSL) Rover is equipped with a set of 12 en- gineering cameras. These cameras are build-to-print copies of the Mars Exploration Rover cameras described in Maki et al. (J. Geophys. Res. 108(E12): 8071, 2003). Images returned from the engineering cameras will be used to navigate the rover on the Martian surface, de- ploy the rover robotic arm, and ingest samples into the rover sample processing system. The Navigation cameras (Navcams) are mounted to a pan/tilt mast and have a 45-degree square field of view (FOV) with a pixel scale of 0.82 mrad/pixel. The Hazard Avoidance Cameras (Hazcams) are body-mounted to the rover chassis in the front and rear of the vehicle and have a 124-degree square FOV with a pixel scale of 2.1 mrad/pixel. All of the cameras uti- lize a 1024 × 1024 pixel detector and red/near IR bandpass filters centered at 650 nm. The MSL engineering cameras are grouped into two sets of six: one set of cameras is connected to rover computer “A” and the other set is connected to rover computer “B”. The Navcams and Front Hazcams each provide similar views from either computer. The Rear Hazcams provide different views from the two computers due to the different mounting locations of the “A” and “B” Rear Hazcams. -

Crystal Chemistry of Martian Minerals from Bradbury Landing Through
1 Revision 2: 2 Crystal chemistry of martian minerals from Bradbury Landing 3 through Naukluft Plateau, Gale crater, Mars 4 5 SHAUNNA M. MORRISON,1,2* ROBERT T. DOWNS,1 DAVID F. BLAKE,3 DAVID T. VANIMAN,4 DOUGLAS 6 W. MING,5 ROBERT M. HAZEN,2 ALLAN H. TREIMAN,6 CHERIE N. ACHILLES,1 ALBERT S. YEN,7 7 RICHARD V. MORRIS,5 ELIZABETH B. RAMPE,5 THOMAS F. BRISTOW,3 STEVE J. CHIPERA,8 PHILIPPE 8 C. SARRAZIN,9 RALF GELLERT,10 KIM V. FENDRICH,11 JOHN MICHAEL MOROOKIAN,7 JACK D. 9 FARMER,12 DAVID J. DES MARAIS,3 AND PATRICIA I. CRAIG6 1 10 UNIVERSITY OF ARIZONA, 1040 E 4TH ST, TUCSON, AZ, 85721 U.S.A. 2 11 GEOPHYSICAL LABORATORY, CARNEGIE INSTITUTION, 5251 BROAD BRANCH RD NW, WASHINGTON, DC, 20015 12 U.S.A. 3 13 NASA AMES RESEARCH CENTER, MOFFETT FIELD, CA 94035, U.S.A. 4 14 PLANETARY SCIENCE INSTITUTE, 1700 E. FORT LOWELL, TUCSON, AZ 85719-2395, U.S.A. 5 15 NASA JOHNSON SPACE CENTER, HOUSTON, TX, 77058 U.S.A. 6 16 LUNAR AND PLANETARY INSTITUTE - USRA, 3600 BAY AREA BLVD, HOUSTON, TX 77058, U.S.A. 7 17 JET PROPULSION LABORATORY, CALIFORNIA INSTITUTE OF TECHNOLOGY, 4800 OAK GROVE DRIVE, PASADENA, CA 18 91109, U.S.A. 8 19 CHESAPEAKE ENERGY CORPORATION, 6100 N. WESTERN AVENUE, OKLAHOMA CITY, OK 73118, U.S.A. 9 20 SETI INSTITUTE, MOUNTAIN VIEW, CA 94043 U.S.A. 10 21 UNIVERSITY OF GUELPH, 50 STONE RD E, GUELPH, ON N1G 2W1, CANADA 11 22 AMERICAN MUSEUM OF NATURAL HISTORY, NEW YORK, NY 10024, U.S.A. -

Grotzinger 1..13
RESEARCH ◥ with sediment deposition and diagenesis. Ero- RESEARCH ARTICLE SUMMARY sion of Gale’s northern crater wall and rim gen- erated gravel and sand that were transported southward in shallow streams. Over time, these MARTIAN GEOLOGY stream deposits advanced toward the crater interior, transitioning downstream into finer- Deposition, exhumation, and grained (sand-sized), southward-advancing del- ta deposits. These deltas ◥ paleoclimate of an ancient lake ON OUR WEB SITE marked the boundary of Read the full article an ancient lake where the at http://dx.doi. finest (mud-sized) sedi- deposit, Gale crater, Mars org/10.1126/ ments accumulated, infill- science.aac7575 ing both the crater and its .................................................. J. P. Grotzinger,* S. Gupta, M. C. Malin, D. M. Rubin, J. Schieber, K. Siebach, internal lake basin. After D. Y. Sumner, K. M. Stack, A. R. Vasavada, R. E. Arvidson, F. Calef III, L. Edgar, infilling of the crater, the sedimentary deposits W. F. Fischer, J. A. Grant, J. Griffes, L. C. Kah, M. P. Lamb, K. W. Lewis, in Gale crater were exhumed, probably by wind- N. Mangold, M. E. Minitti, M. Palucis, M. Rice, R. M. E. Williams, R. A. Yingst, driven erosion, creating Mount Sharp. The an- D. Blake, D. Blaney, P. Conrad, J. Crisp, W. E. Dietrich, G. Dromart, K. S. Edgett, cient stream and lake deposits are erosional R. C. Ewing, R. Gellert, J. A. Hurowitz, G. Kocurek, P. Mahaffy, M. J. McBride, remnants of superimposed depositional se- S. M. McLennan, M. Mischna, D. Ming, R. Milliken, H. Newsom, D. Oehler, quences that once extended at least 75 m, and T.