Tutorial Introduction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
ACU-M™ Improving In-Building Communications
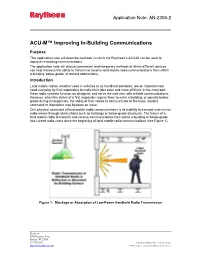
Application Note: AN-2306-2 ACU-M™ Improving In-Building Communications Purpose This application note will describe methods in which the Raytheon’s ACU-M can be used to improve in-building communications. The application note will discuss permanent and temporary methods at which different devices can help increase the ability to transmit or receive land mobile radio communications from within a building, below-grade, or behind obstructions. Introduction Land mobile radios, whether used in vehicles or as handheld portables, are an important tool used everyday by first responders to make their jobs safer and more efficient. In the most part, these radio systems function as designed, and serve the end-user with reliable communications. However, when the duties of a first responder require them to enter a building, or operate below- grade during emergencies, the ability of their radios to communicate to the base, incident command or dispatcher may become an issue. One physical constraint of land mobile radio communications is its inability to transmit and receive radio waves through obstructions such as buildings or below-grade structures. The failure of a land mobile radio to transmit and receive communications from within a building or below-grade has cursed radio users since the beginning of land mobile radio communications (see Figure 1). Figure 1: Blockage or Absorption of Low-Power Handheld Radio Transmission Raytheon 5800 Departure Drive Raleigh, NC 27616 919.790.1011 © Raytheon Company. Data is subject to change. http://www.raytheon.com All Trademarks are the property of their respective owners. Application Note: AN-2306-2 Solutions Land mobile radios were first introduced to public safety, in the late 20’s, in the form of shortwave receivers mounted inside patrol vehicles. -

Rs-232 Rs-422 Rs-485
ConceptConcept ofof SerialSerial CommunicationCommunication AgendaAgenda Serial v.s. Parallel Simplex , Half Duplex , Full Duplex Communication RS-485 Advantage over RS-232 SerialSerial v.s.v.s. ParallelParallel Application: How to Measure the temperature in a long distance? Measuring with a DAC card: 1200 m Remote sensor Control room T/C wire T/C A/D noise Application: How to Measure the temperature in a long distance? Measuring with a remote I/O module: 1200 m Remote sensor Control room T/C Remote I/O Standard Serial Communication T/C signal, 4-20mA, 0-5V… Noise rejection (Differential signal) MostMost PopularPopular 33 typestypes ofof SerialSerial Comm.Comm. z Most commonly available Tx Rx Rx Tx z Simple wiring CTS RTS z Low cost RTS CTS RS-232 z Short length (40 ft) DTR DSR DSR DTR Bar code reader z Slow data rates GND GND z Subject to noise Tx+ z High data rates Tx- z Longer cable lengths (4000 ft) Rx+ Rx- RS-422 z Full-duplex GND z Noise rejection PLC z Multipoint application (Up to 32 units) z Low cost Data+ z Longer cable lengths (4000 ft) Data- RS-485 zNoise immunity GND zHalf-duplex PLC SerialSerial V.S.V.S. ParallelParallel CommunicationCommunication Serial Communication Transfer the data bit by bit Synchronous Data Transfer Bit Send Data Receive Data Parallel Communication Transfer the all data simultaneously Asynchronous Data Transfer Bit Bit Bit Bit Bit Bit Bit Bit Send Data Receive Data SimplexSimplex ,, HalfHalf DuplexDuplex ,, FullFull DuplexDuplex CommunicationCommunication SimplexSimplex CommunicationCommunication Simplex Communication : – Data in a simplex channel is always one way. -

Restricted Radiotelephone Operator's
INDEPENDENT COMMUNICATIONS AUTHORITY OF SOUTH AFRICA RESTRICTED RADIOTELEPHONE OPERATOR’S EXAMINATION GUIDE (VHF, MF AND HF) June 2008 TABLE OF CONTENTS EXAMINATION PAYMENT INFORMATION ________________________________________ 3 BACKGROUND ______________________________________________________________ 4 COMMENTS _________________________________________________________________ 8 SYLLABUS FOR THE POSTMASTER GENERAL’S RESTRICTED CERTIFICATE __________ 8 EXAMINATION ARRANGEMENTS _______________________________________________ 9 IMPORTANT RADIOTELEPHONE FREQUENCIES __________________________________ 9 IMPORTANT VHF MARITIME FREQUENCIES ______________________________________ 9 RADIOTELEPHONE DISTRESS PROCEDURE _____________________________________ 9 RADIOTELEPHONE URGENCY ________________________________________________ 15 RADIOTELEPHONE SAFETY __________________________________________________ 16 MARINE TERMINOLOGY & MODES OF EMISSION ________________________________ 17 ALARM SIGNALS ____________________________________________________________ 18 EPIRBS, VERY IMPORTANT CHECKS ON EPIRBS ________________________________ 18 SART (SEARCH AND RESCUE RADAR TRANSPONDER) ___________________________ 19 NAVTEX RECEIVERS ________________________________________________________ 19 SATELLITE COMMUNICATIONS _______________________________________________ 19 RADIOTELEPHONE CALLING PROCEDURE _____________________________________ 20 TABLE OF CALLING AND ANSWERING FREQUENCIES ____________________________ 21 RADIOTELEGRAMS _________________________________________________________ -
Voice Radio Communications Guide for the Fire Service June 2016
U.S. Fire Administration Voice Radio Communications Guide for the Fire Service June 2016 U.S. Fire Administration Mission Statement We provide National leadership to foster a solid foundation for our fi re and emergency services stakeholders in prevention, preparedness, and response. This page intentionally left blank. Voice Radio Communications Guide for the Fire Service i Acknowledgment The U.S. Fire Administration (USFA) is committed to using all means possible for reducing the incidence of injuries and deaths to firefighters. One of these means is to partner with organizations that share this same admirable goal. One such organization is the International Association of Fire Fighters (IAFF). As a labor union, the IAFF has been deeply committed to improving the safety of its members and all firefighters as a whole. This is why the USFA was pleased to work with the IAFF through a partnership supported by the U.S. Department of Homeland Security (DHS), Science and Technology Directorate, First Responders Group, Office for Interoperability and Compatibility to develop this second edition of the “Voice Radio Communications Guide for the Fire Service.” The USFA gratefully acknowledges the following leaders of the IAFF for their willingness to partner on this project: General President Harold Schaitberger General Secretary-Treasurer Thomas Miller Assistant to the General President Occupational Health, Safety and Medicine Patrick Morrison International Association of Fire Fighters, AFL-CIO, CLC Division of Occupational Health, Safety and Medicine -

The Benefits of Computer Networks
قسم علوم الحاسوب | المرحلة الرابعة كلية الرافدين الجامعة د.اسيل خالد Introduction to Computer Network: Interconnected collection of autonomous computers. Tow computers are side to be interconnection if they are able to exchange information. Or: network is simply a collection of intercommunicating computers and peripherals possibly having access to remote hosts and other computer networks. A network consists of a set of computers: hosts, connected via a communication subnet. The word 'host' refers to an individual computer connected to the network, which can communicate with other hosts via the network. A Compute network should ensure: reliability of the data communication process security of the data performance by achieving higher throughput and smaller delay times The benefits of computer networks: We can summarize the benefits of computer networks as follow: 1. Resource sharing: the goal is to make all programs, equipment, and especially data available to anyone on the network without regard to physical location of the resource and the user. 2. High reliability: by having alternative sources of supply .for example, all files could be replicated on two or three machines, so if one of them is unavailable (due to a hardware failure. قسم علوم الحاسوب | المرحلة الرابعة كلية الرافدين الجامعة د.اسيل خالد 3. Saving money: small computers have a Mach better price/performance ratio than large ones. Mainframes (room-size computers) are roughly a factor of ten faster than personal computers, but they cost a thousand times more. 4. Scalability: is the ability to increase system performance gradually as the workload grows just by adding more processors. 5. -

Unit 1. Introduction to Data Communications and Networking
Unit 1. Introduction to data communications and networking 1 NETWORKING FUNDAMENTALS Unit Structure 1.0 Objectives 1.1 Introduction 1.2 Data & Information 1.3 Data Communication 1.3.1 Characteristics of Data Communication 1.3.2 Components of Data Communication 1.4 Data Representation 1.5 Data Flow 1.5.1. Simplex 1.52. Half Duplex 1.5.3. Full Duplex 1.6 Computer Network 1.6.1 Categories of a network 1.7 Protocol 1.7.1 Elements of a Protocol 1.8 Standards In Networking 1.8.1 Concept of Standard 1.8.2 Standard Organizations in field of Networking 1.0 OBJECTIVES: Introduce the readers to data communication and its fundamentals Define networks Define protocols Standards in networking 2 1.1 INTRODUCTION This chapter provides an introduction to Computer networks and covers fundamental topics like data, information to the definition of communication and computer networks. The main objective of data communication and networking is to enable seamless exchange of data between any two points in the world. This exchange of data takes place over a computer network. 1.2 DATA & INFORMATION Data refers to the raw facts that are collected while information refers to processed data that enables us to take decisions. Ex. When result of a particular test is declared it contains data of all students, when you find the marks you have scored you have the information that lets you know whether you have passed or failed. The word data refers to any information which is presented in a form that is agreed and accepted upon by is creators and users. -

Radio Communications
CHINO VALLEY FIRE TRAINING DIVISION Radio Communications June 2014 Article Five So What’s The Problem? Two Basic Types of Communication Dispatch One of the most significant problems facing firefighters Centers within a structure or in the WUI (Wildland Urban Interface) is the ability to communicate reliably between the firefight- 1. Command Center– ers themselves and command staff or dispatch. In an ideal has a Captain or Chief Officer that may augment or tier respons- world, firefighters would be able to communicate with one es due to information or inclem- another and the command post at all times, regardless of ent weather or special circum- stances (aircraft down, high winds, where they are or what they are doing. However, this is not swiftwater, shooter, etc) the case. Firefighter radio communications to, from and 2. Dispatch Center– within structures can be unreliable, thereby compromising has a the ability to dispatch units the safety of firefighters on the fireground. under predesignated run cards or computer generated zones Over the past decade, incidents involving firefighter injuries and fatalities have demonstrated that, despite technological advances in two-way radio communications, important information is not always adequately communicat- ed on the fireground or the incident scene. The continued incidence of firefighter fatalities where communications are cit- ed as a contributing factor as well as the industry-wide lack of consensus on the appropriate frequencies to use in fireground communications have prompted safety organizations to more thoroughly investigate fire communica- In this issue: tions and the problems associated with those communications. The nature of most firefighters is to dig deep into how things work and why What’s The Problem? 1 they fail. -

Boat Crew Seamanship Manual, Chapter 11
BOAT CREW SEAMANSHIP MANUAL “Train, Maintain, Operate” COMDTINST M16114.5C September 2003 Boat Crew Seamanship Manual Chapter 11 Communications Introduction Communication between mariners has long been recognized as a necessity. Using the radio proficiently and knowing proper radio protocol reflects well upon the boat crew’s and the radio operator’s professionalism. It is essential that each boat crewmember is completely aware of the common distress signals and how they are used in emergencies. This chapter will provide basic knowledge of voice communication conventions, procedures, and the various distress signals. Most marine communications are done by using voice radio transmissions. These are very much like two people talking on the telephone, but with significant differences that boat crewmembers must understand. Typically, voice radio communications are “simplex,” or one way at a time - when one person is speaking, the second person must wait. This differs from face-to-face and telephone conversations where voices may overlap. Simplex communication is the reason for many of the procedural regulations for voice radio communications. For additional information on Coast Guard communications, refer to the Telecommunications Manual NOTE (TCM), COMDTINST M2000.3 (series). All operators should check all of their radio equipment for proper operation before getting underway NOTE and immediately report any malfunctions. In this chapter This chapter contains the following sections: Section Title See Page A Radio Signal Characteristics 11-2 B Prowords and Common Abbreviations 11-6 C Verbal Communications 11-7 D Radio Operating Procedures 11-10 E Communicating Between Coast Guard Facilities 11-11 F Emergency Voice Communications and Distress Signals 11-15 G Radio Checks 11-22 H Rescue 21 11-23 11-1 Boat Crew Seamanship Manual Section A. -
Amateur Radio Emergency Communications First Level Training
Amateur Radio Emergency Communications First Level Training Revision 3.1 Final February 2008 Developed for Spokane County ARES/RACES Team Training By AD7FO Spokane County AEC 1 LU 1 What is a Communication Emergency • Occurs when a critical communication failure exists that puts the public at risk. • A variety of circumstances can overload or damage critical day to day communication systems • Storms that knock down communications infrastructure or lines • Fires in telephone equipment buildings • Vehicle penetration into communications centers like 911 or other CCB • Disruption in power • Terrorist attack • Disaster like earthquakes, tsunami's, hurricanes, ice storms, forest fires, volcanic eruptions, etc 2 LU 1 ARES/RACES EMCOMM Volunteers • Volunteers come from a wide variety of backgrounds and have a wide range of skills. • Share a desire to help others without personal gain of any kind • Train and practice to improve their communication skills • Can work together as a team and take direction from others • Can think and act quickly under the stress and pressure of an emergency 3 LU 1 Where does Amateur Radio Fit In? • A Skilled and equipped communications resource for our Served Agencies* • We do Public service events to practice our skills (Bloomsday, Lilac Parade, multiple bike races, etc) • We do practice drills with our Served Agencies to improve our skill in a more realistic scenario and to demonstrate our skills • We are not a single communication channel, system or network, we are dynamic and can adjust to the needs of the situation * Served Agencies are those we have commitments both local and national through ARRL agreements to provide communications when called upon like NOAA (SKYWARN), Red Cross, Spokane DEM, Hospitals, etc. -

Chapter 1.Pmd
1 Introduction 1.1. Concept 1.2. Point-to-Point Communication to Switching Exchange 1.3. Basic Telephone Equipments 1.4. Basic Telephone Communication 1.5. Switching System ➢ References ➢ Exercise 1.1 CONCEPT Telecommunication networks carry information from one place to another situated at a certain distance apart. The word ‘tele’ means distant and ‘communication’ is the process of exchanging feelings and ideas. Grossly, telecommunication can be of two types depending upon the transmission channel placed between the sender of information and the receiver of information. If the channel is a free space or air, the communication is named as Radio wave telecommunication and if the said channel is transmission line or cable, the communication is Line Communication. In telephone communication, the person who originates a call is referred to as the calling subscriber and the person for whom the call is originated is known as the called subscriber or called-for subscriber. In some cases like computer communication and to some extent in telephone communication, the communicating bodies or entities are also known as source (one who transmits a signal) and destination (one who receives a signal). The main idea behind modern telecommunication is to allow anybody in any part of the world to be able to communicate with anybody in any part of the world. The first technological development in the field of telecommunication was the transmission of telegraphic signals over wire. In March 1876, Alexander Graham Bell invented telephone and demonstrated it. It was basically a point-to-point connection. His discovery laid the foundation for telephone communication. -
Digital Mobile Telecommunication System for Local Government
General Papers Digital Mobile Telecommunication System for Local Government MORIYA Hidenori, KINOSHITA Manabu, KATOU Keiichirou, EZAKI Masafumi, NAKADA Yoshiyasu Abstract The “Digital Mobile Telecommunication System for Local Government” is intended to be used for rescue and recov- ery activities upon occurrence of disasters and to be utilized for transmission of administrative information in ordinary days. This paper reports the development result of this system. Keywords mobile communication system, mobile terminal, position information disaster prevention information, IP network which communicates in TDM/TDMA mode using the 1. Introduction 260MHz band frequency. The 260MHz band is a frequency band allotted by the Min- The Digital Mobile Telecommunication System for Local istry of Internal Affairs and Communications to this sys- Government was institutionalized by the Ministry of Internal tem; 260 to 266MHz is used for uplink (from the mobile Affairs and Communications in 2001 and its technical require- station to the base station), and 269 to 275MHz for down- ments are specified in standard T79 of ARIB (Association of link (from the base station to the mobile station) in units of Radio Industries and Businesses). Since then, it is built up and 25kHz. For the communication channel, one carrier is allot- operated as the disaster prevention administration radio sys- ted to a pair of uplink and downlink (with a difference of tem in local governments. 9MHz). For development of this system, NEC aimed for a univer- In TDM/TDMA mode, a frequency is time-divided by a sal design so that the terminal that is directly touched by the 40mS frame and the frame is divided by 4 with a 10mS slot. -

Sixth Meeting of the CCIT
This electronic version (PDF) was scanned by the International Telecommunication Union (ITU) Library & Archives Service from an original paper document in the ITU Library & Archives collections. La présente version électronique (PDF) a été numérisée par le Service de la bibliothèque et des archives de l'Union internationale des télécommunications (UIT) à partir d'un document papier original des collections de ce service. Esta versión electrónica (PDF) ha sido escaneada por el Servicio de Biblioteca y Archivos de la Unión Internacional de Telecomunicaciones (UIT) a partir de un documento impreso original de las colecciones del Servicio de Biblioteca y Archivos de la UIT. (ITU) ﻟﻼﺗﺼﺎﻻﺕ ﺍﻟﺪﻭﻟﻲ ﺍﻻﺗﺤﺎﺩ ﻓﻲ ﻭﺍﻟﻤﺤﻔﻮﻇﺎﺕ ﺍﻟﻤﻜﺘﺒﺔ ﻗﺴﻢ ﺃﺟﺮﺍﻩ ﺍﻟﻀﻮﺋﻲ ﺑﺎﻟﻤﺴﺢ ﺗﺼﻮﻳﺮ ﻧﺘﺎﺝ (PDF) ﺍﻹﻟﻜﺘﺮﻭﻧﻴﺔ ﺍﻟﻨﺴﺨﺔ ﻫﺬﻩ .ﻭﺍﻟﻤﺤﻔﻮﻇﺎﺕ ﺍﻟﻤﻜﺘﺒﺔ ﻗﺴﻢ ﻓﻲ ﺍﻟﻤﺘﻮﻓﺮﺓ ﺍﻟﻮﺛﺎﺋﻖ ﺿﻤﻦ ﺃﺻﻠﻴﺔ ﻭﺭﻗﻴﺔ ﻭﺛﻴﻘﺔ ﻣﻦ ﻧﻘﻼ ً◌ 此电子版(PDF版本)由国际电信联盟(ITU)图书馆和档案室利用存于该处的纸质文件扫描提供。 Настоящий электронный вариант (PDF) был подготовлен в библиотечно-архивной службе Международного союза электросвязи путем сканирования исходного документа в бумажной форме из библиотечно-архивной службы МСЭ. © International Telecommunication Union INTERNATIONAL TELEGRAPH CONSULTATIVE COMMITTEE (C. C. I. T.) DOCUMENTS O F T H E SIXTH MEETING AT BRUSSELS 'lOth—27th May, 1948 (GENEVA REVISION) March 1951 INTERNATIONAL TELECOMMUNICATION UNION OCTOBER 1951 INTERNATIONAL TELEGRAPH CONSULTATIVE COMMITTEE (C. C. I.T .) DOCUMENTS O F T H E SIXTH MEETING AT BRUSSELS 10th—27th May, 1948 (GENEVA REVISION) March 1951 INTERNATIONAL TELECOMMUNICATION UNION OCTOBER 1951 CONTENTS Page Extracts from Minutes of closing meeting of Brussels Meeting (27 May 1948) ...... 3 Postponement until 1953 of the next C. C. I. T. Plenary Meeting, and provisional arrange ments to prevent delay in the work of the C.