Force Estimation Based on Semg Using Wavelet Analysis and Neural Network
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Hubei Province Overview
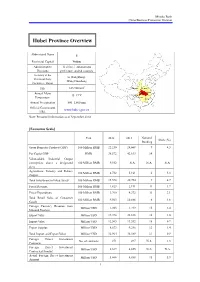
Mizuho Bank China Business Promotion Division Hubei Province Overview Abbreviated Name E Provincial Capital Wuhan Administrative 12 cities, 1 autonomous Divisions prefecture, and 64 counties Secretary of the Li Hongzhong; Provincial Party Wang Guosheng Committee; Mayor 2 Size 185,900 km Shaanxi Henan Annual Mean Hubei Anhui 15–17°C Chongqing Temperature Hunan Jiangxi Annual Precipitation 800–1,600 mm Official Government www.hubei.gov.cn URL Note: Personnel information as of September 2014 [Economic Scale] Unit 2012 2013 National Share (%) Ranking Gross Domestic Product (GDP) 100 Million RMB 22,250 24,668 9 4.3 Per Capita GDP RMB 38,572 42,613 14 - Value-added Industrial Output (enterprises above a designated 100 Million RMB 9,552 N.A. N.A. N.A. size) Agriculture, Forestry and Fishery 100 Million RMB 4,732 5,161 6 5.3 Output Total Investment in Fixed Assets 100 Million RMB 15,578 20,754 9 4.7 Fiscal Revenue 100 Million RMB 1,823 2,191 11 1.7 Fiscal Expenditure 100 Million RMB 3,760 4,372 11 3.1 Total Retail Sales of Consumer 100 Million RMB 9,563 10,886 6 4.6 Goods Foreign Currency Revenue from Million USD 1,203 1,219 15 2.4 Inbound Tourism Export Value Million USD 19,398 22,838 16 1.0 Import Value Million USD 12,565 13,552 18 0.7 Export Surplus Million USD 6,833 9,286 12 1.4 Total Import and Export Value Million USD 31,964 36,389 17 0.9 Foreign Direct Investment No. -

China Clean Energy Study Tour for Urban Infrastructure Development
China Clean Energy Study Tour for Urban Infrastructure Development BUSINESS ROUNDTABLE Tuesday, August 13, 2019 Hyatt Centric Fisherman’s Wharf Hotel • San Francisco, CA CONNECT WITH USTDA AGENDA China Urban Infrastructure Development Business Roundtable for U.S. Industry Hosted by the U.S. Trade and Development Agency (USTDA) Tuesday, August 13, 2019 ____________________________________________________________________ 9:30 - 10:00 a.m. Registration - Banquet AB 9:55 - 10:00 a.m. Administrative Remarks – KEA 10:00 - 10:10 a.m. Welcome and USTDA Overview by Ms. Alissa Lee - Country Manager for East Asia and the Indo-Pacific - USTDA 10:10 - 10:20 a.m. Comments by Mr. Douglas Wallace - Director, U.S. Department of Commerce Export Assistance Center, San Francisco 10:20 - 10:30 a.m. Introduction of U.S.-China Energy Cooperation Program (ECP) Ms. Lucinda Liu - Senior Program Manager, ECP Beijing 10:30 a.m. - 11:45 a.m. Delegate Presentations 10:30 - 10:45 a.m. Presentation by Professor ZHAO Gang - Director, Chinese Academy of Science and Technology for Development 10:45 - 11:00 a.m. Presentation by Mr. YAN Zhe - General Manager, Beijing Public Transport Tram Corporation 11:00 - 11:15 a.m. Presentation by Mr. LI Zhongwen - Head of Safety Department, Shenzhen Metro 11:15 - 11:30 a.m. Tea/Coffee Break 11:30 - 11:45 a.m. Presentation by Ms. WANG Jianxin - Deputy General Manager, Tianjin Metro Operation Corporation 11:45 a.m. - 12:00 p.m. Presentation by Mr. WANG Changyu - Director of General Engineer's Office, Wuhan Metro Group 12:00 - 12:15 p.m. -

Characteristics of Metro Networks and Methodology for Their Evaluation
22 TRANSPORTATION RESEARCH RECORD 1162 Characteristics of Metro Networks and Methodology for Their Evaluation ANTONIO Musso AND VuKAN R. VucH1c PURPOSE, ORGANIZATION, AND SCOPE Presented In this paper are the results of research on metro (rapid transit) networks, focusing on their geometric charac teristics. The object Is to define the most important measures, Presented in this paper is a systematic set of quantitative Indicators, and characteristics of geometric forms that can elements that defines the network characteristics of metro sys Improve the present predominantly empirical methods used in tems that can be used for their description, evaluation, and metro network planning and analysis. Several measures of comparative analysis. Examples of such evaluations include metro network size and rorm, including length, number or planning of new or analysis of existing networks, their com lines, and stations, which express the extensiveness of the sys parison with networks of other cities, and comparison of alter tem, are selected; they are also needed for derivations of various indicators. A number of selected indicators are then native network extensions. presented. These represent the most effective tool for network The quantitative elements are grouped into five general cate comparison because most of them are Independent of network gories, as follows: size. Several Indicators relating metro network to the city size and population express the degree of adequacy of the network 1. Measures of network size and form, to meet the city's needs. Based on experiences from a number of metro systems, characteristics of different types of lines 2. Indicators of network topology, (radial, diametrical, circumferential, and other) are defined. -

High Speed Rail: Wuhan Urban Garden 5-Day Trip
High Speed Rail: Wuhan Urban Garden 5-Day Trip Day 1 Itinerary Suggested Transportation Hong Kong → Wuhan High Speed Rail [Hong Kong West Kowloon Station → Wuhan Railway Station] To hotel: Recommend to stay in a hotel by the river in Wuchang District. Metro: From Wuhan Railway Hotel for reference: Station, take Metro Line 4 The Westin Wuhan Wuchang Hotel towards Huangjinkou. Address: 96 Linjiang Boulevard, Wuchang District, Wuhan Change to Line 2 at Hongshan Square Station towards Tianhe International Airport. Get off at Jiyuqiao Station and walk for about 7 minutes. (Total travel time about 46 minutes) Taxi: About 35 minutes. Enjoy lunch near the hotel On foot: Walk for about 5 minutes Restaurant for reference: Zhen Bafang Hot Pot from the hotel. Address: No. 43 & 44, Building 12-13, Qianjin Road, Wanda Plaza, Jiyu Bridge, Wuchang District, Wuhan Stand the Test of Time: Yellow Crane Tower Bus: Walk for about 4 minutes from the restaurant to Jiyuqiao Metro Station. Take bus 804 towards Nanhu Road Jiangnan Village. Get off at Yue Ma Chang Station and walk for about 6 minutes. (Total travel time about 37 minutes) Taxi: About 15 minutes. Known as “The No. 1 Tower in the World”, the Yellow Crane Tower is a landmark for Wuhan City and Hubei Province and a must-see attraction. The tower was built in the Three Kingdoms era and was named after its erection on Huangjiji, a submerged rock. Well-known ancient characters such as Li Bai, Bai Juyi, Lu You and Yue Fei had all referenced the tower in their poetry works. -
Leading New ICT Building a Smart Urban Rail
Leading New ICT Building A Smart Urban Rail 2017 HUAWEI TECHNOLOGIES CO., LTD. Bantian, Longgang District Shenzhen518129, P. R. China Tel:+86-755-28780808 Huawei Digital Urban Rail Solution Digital Urban Rail Solution LTE-M Solution 04 Next-Generation DCS Solution 10 Urban Rail Cloud Solution 15 Huawei Digital Urban Rail Solution Huawei Digital Urban Rail Solution Huawei LTE-M Solution for Urban Rail Huawei and Alstom the Completed World’s Huawei Digital Urban Rail LTE-M Solution First CBTC over LTE Live Pilot On June 29th, 2015, Huawei and Alstom, one of the world’s leading energy solutions and transport companies, announced the successful completion of the world’s first live pilot test of 4G LTE multi-services based on Communications- based Train Control (CBTC), a railway signalling system based on wireless ground-to-train CBTC PIS CCTV Dispatching communication. The successful pilot, which CURRENT STATUS IN URBAN RAIL covered the unified multi-service capabilities TV Wall ATS Server Terminal In recent years, public Wi-Fi access points have become a OCC of several systems including CBTC, Passenger popular commodity in urban areas. Due to the explosive growth Information System (PIS), and closed-circuit in use of multimedia devices like smart phones, tablets and NMS LTE CN television (CCTV), marks a major step forward in notebooks, the demand on services of these devices in crowded the LTE commercialization of CBTC services. Line/Station Section/Depot Station places such as metro stations has dramatically increased. Huge BBU numbers of Wi-Fi devices on the platforms and in the trains RRU create chances of interference with Wi-Fi networks, which TAU TAU Alstom is the world’s first train manufacturer to integrate LTE 4G into its signalling system solution, the Urbalis Fluence CBTC Train AR IPC PIS AP TCMS solution, which greatly improves the suitability of eLTE, providing a converged ground-to-train wireless communication network Terminal When the CBTC system uses Wi-Fi technology to implement for metro operations. -

Use Style: Paper Title
2019 4th International Conference on Education and Social Development (ICESD 2019) ISBN: 978-1-60595-621-3 Wuhan Subway Economic Development in the Perspective of "Innovation, Coordination, Green, Open, Sharing" Concept 1,a 2,b, Fang WANG and Xiao-sheng LEI * 1Hubei University of Traditional Chinese Medicine, Wuhan, Hubei, China 2Hubei University of Traditional Chinese Medicine, Wuhan, Hubei, China [email protected], [email protected] *Corresponding author Keywords: Development Concept, Wuhan, Subway Economy. Abstract. Since the 18th congress of the communist party of China, the "innovation, coordination, green, open and shared" development concept has been a profound change in the overall situation of China's development. In this context, the Wuhan Metro has developed rapidly, This paper analyzes the current situation, characteristics and influence of the development of subway economy in Wuhan from the perspective of development concept, and puts forward some suggestions for the future development of subway economy. Introduction For a long time, China has faced problems such as uneven, inadequate, uncoordinated and unsustainable development, and it has already faced the "ceiling dilemma". In recent years, China is facing the downward pressure of the economy. In order to change the development mode and solve the development problems, the 18th National Congress put forward five development concepts of “innovation, coordination, green, openness and sharing”, which have important guidance for the future development of social economy. Xiong'an New District is an innovative, coordinated, green ecological, open and co-constructed shared future urban model. Wuhan, following the glory of history, is becoming a reactivated city, and it must follow this development philosophy. -

Executive Management's Report: Overseas Growth
MTR CORPORATION LIMITED ANNUAL REPORT 2005 27 growingbroader The RMB4.6 billion Beijing Metro Line 4 and RMB6 billion Shenzhen Metro Line 4 projects, both major milestones on our overseas expansion, saw significant progress Overseas growth MTR Corporation made significant strides in our international expansion in 2005, achieving a number of major milestones in the Mainland of China. Mainland of China MTR Corporation’s entry into the rail market in the Mainland of China was heralded by the signing of an Agreement in Principle in January 2004 with the Shenzhen Municipal Government to build Phase 2 of the Shenzhen Metro Line 4 and to operate both Phase 1 and Phase 2 of the line for 30 years. With total project cost of Phase 2 estimated at RMB6 billion, the project also envisages significant property development at stations and depots along the new extension with an aggregate gross floor area of 2.9 million square metres of residential and commercial space based on the Company’s well proven “rail and property”business model in Hong Kong. During 2005, the Company achieved several major milestones on this build-operate-transfer project. In May, the feasibility study report was submitted to NDRC for approval, and the Concession Agreement was initialled with the Shenzhen Municipal Government, following which detailed design work began in earnest.This was followed in November by ground breaking on a trial section of Phase 2, with full project construction planned to commence once the Concession Agreement is signed. Bank financing for the project, representing approximately 60% of the total project cost, was secured in June when a detailed term sheet providing for a RMB 3.6 billion 25-year non-recourse bank loan was initialled with China Development Bank. -

Development of High-Speed Rail in the People's Republic of China
ADBI Working Paper Series DEVELOPMENT OF HIGH-SPEED RAIL IN THE PEOPLE’S REPUBLIC OF CHINA Pan Haixiao and Gao Ya No. 959 May 2019 Asian Development Bank Institute Pan Haixiao is a professor at the Department of Urban Planning of Tongji University. Gao Ya is a PhD candidate at the Department of Urban Planning of Tongji University. The views expressed in this paper are the views of the author and do not necessarily reflect the views or policies of ADBI, ADB, its Board of Directors, or the governments they represent. ADBI does not guarantee the accuracy of the data included in this paper and accepts no responsibility for any consequences of their use. Terminology used may not necessarily be consistent with ADB official terms. Working papers are subject to formal revision and correction before they are finalized and considered published. The Working Paper series is a continuation of the formerly named Discussion Paper series; the numbering of the papers continued without interruption or change. ADBI’s working papers reflect initial ideas on a topic and are posted online for discussion. Some working papers may develop into other forms of publication. Suggested citation: Haixiao, P. and G. Ya. 2019. Development of High-Speed Rail in the People’s Republic of China. ADBI Working Paper 959. Tokyo: Asian Development Bank Institute. Available: https://www.adb.org/publications/development-high-speed-rail-prc Please contact the authors for information about this paper. Email: [email protected] Asian Development Bank Institute Kasumigaseki Building, 8th Floor 3-2-5 Kasumigaseki, Chiyoda-ku Tokyo 100-6008, Japan Tel: +81-3-3593-5500 Fax: +81-3-3593-5571 URL: www.adbi.org E-mail: [email protected] © 2019 Asian Development Bank Institute ADBI Working Paper 959 Haixiao and Ya Abstract High-speed rail (HSR) construction is continuing at a rapid pace in the People’s Republic of China (PRC) to improve rail’s competitiveness in the passenger market and facilitate inter-city accessibility. -

METROS/U-BAHN Worldwide
METROS DER WELT/METROS OF THE WORLD STAND:31.12.2020/STATUS:31.12.2020 ّ :جمهورية مرص العرب ّية/ÄGYPTEN/EGYPT/DSCHUMHŪRIYYAT MISR AL-ʿARABIYYA :القاهرة/CAIRO/AL QAHIRAH ( حلوان)HELWAN-( المرج الجديد)LINE 1:NEW EL-MARG 25.12.2020 https://www.youtube.com/watch?v=jmr5zRlqvHY DAR EL-SALAM-SAAD ZAGHLOUL 11:29 (RECHTES SEITENFENSTER/RIGHT WINDOW!) Altamas Mahmud 06.11.2020 https://www.youtube.com/watch?v=P6xG3hZccyg EL-DEMERDASH-SADAT (LINKES SEITENFENSTER/LEFT WINDOW!) 12:29 Mahmoud Bassam ( المنيب)EL MONIB-( ش ربا)LINE 2:SHUBRA 24.11.2017 https://www.youtube.com/watch?v=-UCJA6bVKQ8 GIZA-FAYSAL (LINKES SEITENFENSTER/LEFT WINDOW!) 02:05 Bassem Nagm ( عتابا)ATTABA-( عدىل منصور)LINE 3:ADLY MANSOUR 21.08.2020 https://www.youtube.com/watch?v=t7m5Z9g39ro EL NOZHA-ADLY MANSOUR (FENSTERBLICKE/WINDOW VIEWS!) 03:49 Hesham Mohamed ALGERIEN/ALGERIA/AL-DSCHUMHŪRĪYA AL-DSCHAZĀ'IRĪYA AD-DĪMŪGRĀTĪYA ASCH- َ /TAGDUDA TAZZAYRIT TAMAGDAYT TAỴERFANT/ الجمهورية الجزائرية الديمقراطيةالشعبية/SCHA'BĪYA ⵜⴰⴳⴷⵓⴷⴰ ⵜⴰⵣⵣⴰⵢⵔⵉⵜ ⵜⴰⵎⴰⴳⴷⴰⵢⵜ ⵜⴰⵖⴻⵔⴼⴰⵏⵜ : /DZAYER TAMANEỴT/ دزاير/DZAYER/مدينة الجزائر/ALGIER/ALGIERS/MADĪNAT AL DSCHAZĀ'IR ⴷⵣⴰⵢⴻⵔ ⵜⴰⵎⴰⵏⴻⵖⵜ PLACE DE MARTYRS-( ع ني نعجة)AÏN NAÂDJA/( مركز الحراش)LINE:EL HARRACH CENTRE ( مكان دي مارت بز) 1 ARGENTINIEN/ARGENTINA/REPÚBLICA ARGENTINA: BUENOS AIRES: LINE:LINEA A:PLACA DE MAYO-SAN PEDRITO(SUBTE) 20.02.2011 https://www.youtube.com/watch?v=jfUmJPEcBd4 PIEDRAS-PLAZA DE MAYO 02:47 Joselitonotion 13.05.2020 https://www.youtube.com/watch?v=4lJAhBo6YlY RIO DE JANEIRO-PUAN 07:27 Así es BUENOS AIRES 4K 04.12.2014 https://www.youtube.com/watch?v=PoUNwMT2DoI -

Ozone and Fine Particle in the Western Yangtze River Delta: an Overview Of
Atmos. Chem. Phys. Discuss., 13, C673–C680, 2013 Atmospheric www.atmos-chem-phys-discuss.net/13/C673/2013/ Chemistry © Author(s) 2013. This work is distributed under and Physics the Creative Commons Attribute 3.0 License. Discussions Interactive comment on “Ozone and fine particle in the western Yangtze River Delta: an overview of 1-yr data at the SORPES station” by A. J. Ding et al. Anonymous Referee #1 Received and published: 19 March 2013 General comments: The manuscript shows a 1 year data series of trace gases and PM2.5 observations in the recently set up SORPES station in East China. The site is under influence of urban and biomass burning emissions, being an interesting location to study the interactions between surface emissions and pollution transport. The dataset is of good quality and the data analysis consistent. I recommend publication in ACP after minor revisions, according to the following comments. Specific comments: 1. Section 2.1: You did not mention the construction works in the campus (Herman et C673 al., 2013). This could be a significant source or aerosols. Please discuss the potential impact on your results. 2. Page 2840, lines 11-13: It would be great to give the reader an idea of spatial distances, either by adding a length scale to Figure 1c, or by mentioning distances in the text. 3. Page 2840, line 19: what was the measurement height? 40 m above ground level? Or 40 m above the surrounding landscape? 4. Section 2.1: How about meteorological measurements? What equipment was used, and which variables were measured? 5. -

High-Resolution (0.05°X0.05°) Nox Emissions in the Yangtze River Delta Inferred from OMI”
Review “High-resolution (0.05°x0.05°) NOx emissions in the Yangtze River delta inferred from OMI” The manuscript entitled ‘High-resolution (0.05◦×0.05◦) NOx emissions in the Yangtze River Delta inferred from OMI’ presents an inventive method to estimate NOx emissions on a high resolution from satellite observations. The topic is interesting and important. Important aspect is also the error analysis that has been described in detail. However, before the paper gets published, the manuscript can be improved a lot by adding more discussion of the results including the relation to other existing inventories, and the description of method should be rephrased in a clearer way. General remarks This inventory is presented as the only high resolution inventory for the YRD region, but in the MarcoPolo-Panda project, a high resolution emission inventory of 0.01 degree resolution has been developed for this region (see http://www.marcopolo-panda.eu/products/toolbox/emission-data/) Since the affiliations of the authors were also participating in the MarcoPolo-Panda project it is surprising that this inventory is not mentioned or used in their comparisons. Also Zhao et al. (2015) present a city-scale emission inventory with the resolution of 3kmx3km in Nanjing, in the Yangtze River Delta.: Zhao, Y., Qiu, L. P., Xu, R. Y., Xie, F. J., Zhang, Q., Yu, Y. Y., Nielsen, C. P., Qin, H. X., Wang, H. K., Wu, X. C., Li, W. Q., and Zhang, J.: Advantages of a city-scale emission inventory for urban air quality research and policy: the case of Nanjing, a typical industrial city in the Yangtze River Delta, China, Atmos. -

Associating the COVID-19 Severity with Urban Factors: a Case Study of Wuhan
Associating the COVID-19 Severity with Urban Factors: A Case Study of Wuhan Xin Li School of Architecture and Civil Engineering, Xiamen University Lin Zhou School of Urban Design, Wuhan University Tao Jia ( [email protected] ) Wuhan University Ran Peng School of Civil Engineering and Architecture, Wuhan Institute of Technology Xiongwu Fu Wuhan Landuse and Urban Spatial Planning Research Center Yuliang Zou School of Public Health, Wuhan University Research Keywords: COVID-19, Weibo, epidemic pattern, spatial analysis, urban factors Posted Date: June 18th, 2020 DOI: https://doi.org/10.21203/rs.3.rs-34863/v1 License: This work is licensed under a Creative Commons Attribution 4.0 International License. Read Full License Page 1/28 Abstract Wuhan encountered a serious attack in the rst round of the COVID-19 pandemic which has resulted in serious worldwide consequences politically and economically. Based on the Weibo help data, we inferred the spatial distribution pattern of the epidemic situation and its impacts. Seven urban factors, i.e. urban growth, general hospital, commercial facilities, subway station, landuse mixture, aging ratio, and road density, were selected for validation with the ordinary linear model, and the former six presented globally signicant association with the epidemic severity; thereafter, the geographically weighted regression model was further adopted for local test to identify their unevenly distributed effects in urban space. Among the six, the place where general hospitals exert effects on epidemic situation highly is associated with their distribution and density; commercial facilities appear the most prevalently distributed factor over the city; newly developed residential quarters with high-rise buildings face greater risks, mainly distributed around the waterfront area of Hanyang and Wuchang; the inuence of subway stations concentrates at the adjacency place where the three towns meet and near-terminal locations; aging ratio dominantly affects the hinterland of Hankou in a broader extent than other areas in the city.