Urban Deformation Monitoring Using Persistent Scatterer Interferometry and SAR Tomography
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Spatiotemporal Evolution of Lakes Under Rapid Urbanization: a Case Study in Wuhan, China
water Article Spatiotemporal Evolution of Lakes under Rapid Urbanization: A Case Study in Wuhan, China Chao Wen 1, Qingming Zhan 1,* , De Zhan 2, Huang Zhao 2 and Chen Yang 3 1 School of Urban Design, Wuhan University, Wuhan 430072, China; [email protected] 2 China Construction Third Bureau Green Industry Investment Co., Ltd., Wuhan 430072, China; [email protected] (D.Z.); [email protected] (H.Z.) 3 College of Urban and Environmental Sciences, Peking University, Beijing 100871, China; [email protected] * Correspondence: [email protected]; Tel.: +86-139-956-686-39 Abstract: The impact of urbanization on lakes in the urban context has aroused continuous attention from the public. However, the long-term evolution of lakes in a certain megacity and the heterogeneity of the spatial relationship between related influencing factors and lake changes are rarely discussed. The evolution of 58 lakes in Wuhan, China from 1990 to 2019 was analyzed from three aspects of lake area, lake landscape, and lakefront ecology, respectively. The Multi-Scale Geographic Weighted Regression model (MGWR) was then used to analyze the impact of related influencing factors on lake area change. The investigation found that the total area of 58 lakes decreased by 15.3%. A worsening trend was found regarding lake landscape with the five landscape indexes of lakes dropping; in contrast, lakefront ecology saw a gradual recovery with variations in the remote sensing ecological index (RSEI) in the lakefront area. The MGWR regression results showed that, on the whole, the increase in Gross Domestic Product (GDP), RSEI in the lakefront area, precipitation, and humidity Citation: Wen, C.; Zhan, Q.; Zhan, contributed to lake restoration. -

Seasonal Succession of Bacterial Communities in Three Eutrophic Freshwater Lakes
International Journal of Environmental Research and Public Health Case Report Seasonal Succession of Bacterial Communities in Three Eutrophic Freshwater Lakes Bin Ji, Cheng Liu, Jiechao Liang and Jian Wang * Department of Water and Wastewater Engineering, Wuhan University of Science and Technology, Wuhan 430065, China; [email protected] (B.J.); [email protected] (C.L.); [email protected] (J.L.) * Correspondence: [email protected]; Tel.: +86-27-68893616 Abstract: Urban freshwater lakes play an indispensable role in maintaining the urban environment and are suffering great threats of eutrophication. Until now, little has been known about the seasonal bacterial communities of the surface water of adjacent freshwater urban lakes. This study reported the bacterial communities of three adjacent freshwater lakes (i.e., Tangxun Lake, Yezhi Lake and Nan Lake) during the alternation of seasons. Nan Lake had the best water quality among the three lakes as reflected by the bacterial eutrophic index (BEI), bacterial indicator (Luteolibacter) and functional prediction analysis. It was found that Alphaproteobacteria had the lowest abundance in summer and the highest abundance in winter. Bacteroidetes had the lowest abundance in winter, while Planctomycetes had the highest abundance in summer. N/P ratio appeared to have some relationships with eutrophication. Tangxun Lake and Nan Lake with higher average N/P ratios (e.g., N/P = 20) tended to have a higher BEI in summer at a water temperature of 27 ◦C, while Yezhi Lake with a relatively lower average N/P ratio (e.g., N/P = 14) tended to have a higher BEI in spring and autumn at a water temperature of 9–20 ◦C. -

Planning Strategy and Practice of Low-Carbon City Construction , 46 Th ISOCARP Congress 2010
Zhang Wentong, Planning Strategy and Practice of Low-carbon City Construction , 46 th ISOCARP Congress 2010 Planning Strategy and Practice of Low-carbon City Construction Development in Wuhan, China Zhang Wentong Yidong Hu I. Exploration on Planning of Low-carbon City Construction under the Global Context The concept of low-carbon is proposed in the context of responding to global climate change and advocating reducing the discharge of greenhouse gases in human’s production activities. While in the urban area, the low-carbon city is evolved gradually from the concept of ecological city, and these two can go hand in hand. The connotation of low-carbon city has also changed from the environment subject majoring in reducing carbon emission to a comprehensive subject including society, culture, economy and environment. Low-carbon city has become a macro-system synthesizing low-carbon technology, low-carbon production & consumption mode and mode of operation of low-carbon city. At last it will be amplified to the entire level of ecological city. The promotion of low-carbon city construction has a profound background of times and practical significance. Just as Professor Yu Li from Cardiff University of Great Britain has summed up, at least there are reasons from three aspects for the promotion of low-carbon city construction: firstly, reduce the emission of carbon through the building of ecological cities and return to a living style with the harmonious development between man and the nature; secondly, different countries hope to obtain a leading position in innovation through exploration on ecological city technology, idea and development mode and to lead the construction of sustainable city of the next generation; thirdly, to resolve the main problems in the country and local areas as well as the problem of “global warming”. -

Technical Assistance Consultant's Report People's Republic of China
Technical Assistance Consultant’s Report Project Number: 42011 November 2009 People’s Republic of China: Wuhan Urban Environmental Improvement Project Prepared by Easen International Co., Ltd in association with Kocks Consult GmbH For Wuhan Municipal Government This consultant’s report does not necessarily reflect the views of ADB or the Government concerned, and ADB and the Government cannot be held liable for its contents. (For project preparatory technical assistance: All the views expressed herein may not be incorporated into the proposed project’s design. ADB TA No. 7177- PRC Project Preparatory Technical Assistance WUHAN URBAN ENVIRONMENTAL IMPROVEMENT PROJECT Final Report November 2009 Volume I Project Analysis Consultant Executing Agency Easen International Co., Ltd. Wuhan Municipal Government in association with Kocks Consult GmbH ADB TA 7177-PRC Wuhan Urban Environmental Improvement Project Table of Contents WUHAN URBAN ENVIRONMENTAL IMPROVEMENT PROJECT ADB TA 7177-PRC FINAL REPORT VOLUME I PROJECT ANALYSIS TABLE OF CONTENTS Abbreviations Executive Summary Section 1 Introduction 1.1 Introduction 1-1 1.2 Objectives of the PPTA 1-1 1.3 Summary of Activities to Date 1-1 1.4 Implementation Arrangements 1-2 Section 2 Project Description 2.1 Project Rationale 2-1 2.2 Project Impact, Outcome and Benefits 2-2 2.3 Brief Description of the Project Components 2-3 2.4 Estimated Costs and Financial Plan 2-6 2.5 Synchronized ADB and Domestic Processes 2-6 Section 3 Technical Analysis 3.1 Introduction 3-1 3.2 Sludge Treatment and Disposal Component 3-1 3.3 Technical Analysis for Wuhan New Zone Lakes/Channels Rehabilitation, Sixin Pumping Station and Yangchun Lake Secondary Urban Center Lake Rehabilitation 3-51 3.4 Summary, Conclusions and Recommendations 3-108 Section 4 Environmental Impact Assessment 4.1 Status of EIAs and SEIA Approval 4-1 4.2 Overview of Chinese EIA Reports 4-1 Easen International Co. -
Hubei Province Overview
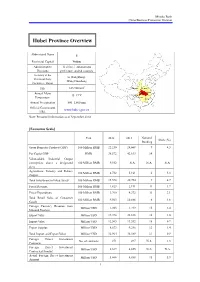
Mizuho Bank China Business Promotion Division Hubei Province Overview Abbreviated Name E Provincial Capital Wuhan Administrative 12 cities, 1 autonomous Divisions prefecture, and 64 counties Secretary of the Li Hongzhong; Provincial Party Wang Guosheng Committee; Mayor 2 Size 185,900 km Shaanxi Henan Annual Mean Hubei Anhui 15–17°C Chongqing Temperature Hunan Jiangxi Annual Precipitation 800–1,600 mm Official Government www.hubei.gov.cn URL Note: Personnel information as of September 2014 [Economic Scale] Unit 2012 2013 National Share (%) Ranking Gross Domestic Product (GDP) 100 Million RMB 22,250 24,668 9 4.3 Per Capita GDP RMB 38,572 42,613 14 - Value-added Industrial Output (enterprises above a designated 100 Million RMB 9,552 N.A. N.A. N.A. size) Agriculture, Forestry and Fishery 100 Million RMB 4,732 5,161 6 5.3 Output Total Investment in Fixed Assets 100 Million RMB 15,578 20,754 9 4.7 Fiscal Revenue 100 Million RMB 1,823 2,191 11 1.7 Fiscal Expenditure 100 Million RMB 3,760 4,372 11 3.1 Total Retail Sales of Consumer 100 Million RMB 9,563 10,886 6 4.6 Goods Foreign Currency Revenue from Million USD 1,203 1,219 15 2.4 Inbound Tourism Export Value Million USD 19,398 22,838 16 1.0 Import Value Million USD 12,565 13,552 18 0.7 Export Surplus Million USD 6,833 9,286 12 1.4 Total Import and Export Value Million USD 31,964 36,389 17 0.9 Foreign Direct Investment No. -

China Clean Energy Study Tour for Urban Infrastructure Development
China Clean Energy Study Tour for Urban Infrastructure Development BUSINESS ROUNDTABLE Tuesday, August 13, 2019 Hyatt Centric Fisherman’s Wharf Hotel • San Francisco, CA CONNECT WITH USTDA AGENDA China Urban Infrastructure Development Business Roundtable for U.S. Industry Hosted by the U.S. Trade and Development Agency (USTDA) Tuesday, August 13, 2019 ____________________________________________________________________ 9:30 - 10:00 a.m. Registration - Banquet AB 9:55 - 10:00 a.m. Administrative Remarks – KEA 10:00 - 10:10 a.m. Welcome and USTDA Overview by Ms. Alissa Lee - Country Manager for East Asia and the Indo-Pacific - USTDA 10:10 - 10:20 a.m. Comments by Mr. Douglas Wallace - Director, U.S. Department of Commerce Export Assistance Center, San Francisco 10:20 - 10:30 a.m. Introduction of U.S.-China Energy Cooperation Program (ECP) Ms. Lucinda Liu - Senior Program Manager, ECP Beijing 10:30 a.m. - 11:45 a.m. Delegate Presentations 10:30 - 10:45 a.m. Presentation by Professor ZHAO Gang - Director, Chinese Academy of Science and Technology for Development 10:45 - 11:00 a.m. Presentation by Mr. YAN Zhe - General Manager, Beijing Public Transport Tram Corporation 11:00 - 11:15 a.m. Presentation by Mr. LI Zhongwen - Head of Safety Department, Shenzhen Metro 11:15 - 11:30 a.m. Tea/Coffee Break 11:30 - 11:45 a.m. Presentation by Ms. WANG Jianxin - Deputy General Manager, Tianjin Metro Operation Corporation 11:45 a.m. - 12:00 p.m. Presentation by Mr. WANG Changyu - Director of General Engineer's Office, Wuhan Metro Group 12:00 - 12:15 p.m. -

1 Opening Speech Time: 08:45 - 09:00 President’S Speech: Jian Guo Zhou, 10 Min Dean’S Speech: Baoshan Cui, 5 Min
Sponsored by National Key R&D Program of China (2018YFC1406400, 2016YFC0500402, 2017YFC0506603, 2018YFC0407403) Key Lab of Water and Sediment Science of the Ministry of Education (IAHR) International Association for Hydro-Environment Engineering and Research 1 Scientific Committee Name School Country John Bridgeman The University of Bradford U.K. Stuart Bunn Griffith University Australia John Cater The University of Auckland New Zealand Muk Chen Ong University of Stavanger Norway Taiwan, Jianzhong Chen Fooyin University China Carlo Gualtieri University of Naples Italy China Institute of Water Resources and Wei Huang China Hydropower Research Magnus Larson Lund University Sweden Yiping Li Hohai University China Pengzhi Lin Sichuan University China China Institute of Water Resources and Shu Liu China Hydropower Research William Nardin The University of Maryland U.S.A. Ling Qian Manchester Metropolitan University U.K. Benedict Rogers The University of Manchester U.K. Xinshan Song Donghua University China Marcel Stive Delft University of Technology Netherlands Guangzhi Sun Edith Cowan University Australia Xuelin Tang Chinese Agricultural University China Roger Wang Rutgers University U.S.A. Zheng Bing Wang Delft University of Technology Netherlands Yujun Yi Beijing Normal University China Xiao Yu University of Florida U.S.A. Zhonglong Zhang Portland State University U.S.A. 2 Conference Committee Chair: Jian Guo Zhou, Manchester Metropolitan University Co-Chairs: Baoshan Cui, Beijing Normal University Alistair G.L. Borthwick, The University -

Summary Environmental Impact Assessment Wuhan
SUMMARY ENVIRONMENTAL IMPACT ASSESSMENT WUHAN WASTEWATER MANAGEMENT PROJECT IN THE PEOPLE’S REPUBLIC OF CHINA July 2002 CURRENCY EQUIVALENTS (as of 15 June 2002) Currency Unit - yuan (CNY) CNY 1.00 = $0.121 $1.00 = CNY8.27 The exchange rate of the yuan is determined under a floating exchange rate system. In this report a rate of $1.00 = CNY8.27 is used. ABBREVIATIONS AAOV average annual output value A/C anaerobic plus modified carousel oxidation ditch process ADB Asian Development Bank A/O anaerobic/ oxic AP affected people BOD biochemical oxygen demand CODcr chemical oxygen demand EIA environmental impact assessment EIRR economic internal rate of return HPEPB Hubei Provincial Environmental Protection Bureau PPTA project preparatory technical assistance PRC People’s Republic of China PRO project resettlement office RAP Resettlement Action Plan RP Resettlement Plan SEPA State Environmental Protection Administration t/yr ton per year WMEPB Wuhan Municipal Environmental Protection Bureau WMWC Wuhan Municipal Wastewater Company WPMO Wuhan Project Management Office WWTP wastewater treatment plant WEIGHTS AND MEASURES ha Hectare km Kilometer km2 square kilometer m Meter m/s meter per second m3 cubic meter m3/day cubic meter per day t/yr ton per year NOTES: (i) The fiscal year (FY) of the government coincides with the calendar year. (ii) In this report, “$” refers to US dollars. CONTENTS MAP(s) ii I. INTRODUCTION 1 II. PROJECT DESCRIPTION 1 III. DESCRIPTION OF THE ENVIRONMENT 2 A. Topography and Geology 2 B. Climate and Rainfall 2 C. Hydrology 3 D. Ecological Resources 3 E. Water Quality and Pollution 4 F. Social and Economic Conditions 4 IV. -

High Speed Rail: Wuhan Urban Garden 5-Day Trip
High Speed Rail: Wuhan Urban Garden 5-Day Trip Day 1 Itinerary Suggested Transportation Hong Kong → Wuhan High Speed Rail [Hong Kong West Kowloon Station → Wuhan Railway Station] To hotel: Recommend to stay in a hotel by the river in Wuchang District. Metro: From Wuhan Railway Hotel for reference: Station, take Metro Line 4 The Westin Wuhan Wuchang Hotel towards Huangjinkou. Address: 96 Linjiang Boulevard, Wuchang District, Wuhan Change to Line 2 at Hongshan Square Station towards Tianhe International Airport. Get off at Jiyuqiao Station and walk for about 7 minutes. (Total travel time about 46 minutes) Taxi: About 35 minutes. Enjoy lunch near the hotel On foot: Walk for about 5 minutes Restaurant for reference: Zhen Bafang Hot Pot from the hotel. Address: No. 43 & 44, Building 12-13, Qianjin Road, Wanda Plaza, Jiyu Bridge, Wuchang District, Wuhan Stand the Test of Time: Yellow Crane Tower Bus: Walk for about 4 minutes from the restaurant to Jiyuqiao Metro Station. Take bus 804 towards Nanhu Road Jiangnan Village. Get off at Yue Ma Chang Station and walk for about 6 minutes. (Total travel time about 37 minutes) Taxi: About 15 minutes. Known as “The No. 1 Tower in the World”, the Yellow Crane Tower is a landmark for Wuhan City and Hubei Province and a must-see attraction. The tower was built in the Three Kingdoms era and was named after its erection on Huangjiji, a submerged rock. Well-known ancient characters such as Li Bai, Bai Juyi, Lu You and Yue Fei had all referenced the tower in their poetry works. -

Spatiotemporal Distribution and Mass Loadings of Perfluoroalkyl
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Institutional Repository of Guangzhou Institute of Geochemistry,CAS(GIGCAS OpenIR) Science of the Total Environment 493 (2014) 580–587 Contents lists available at ScienceDirect Science of the Total Environment journal homepage: www.elsevier.com/locate/scitotenv Spatiotemporal distribution and mass loadings of perfluoroalkyl substances in the Yangtze River of China Chang-Gui Pan, Guang-Guo Ying ⁎, Jian-Liang Zhao, You-Sheng Liu, Yu-Xia Jiang, Qian-Qian Zhang State Key Laboratory of Organic Geochemistry, Guangzhou Institute of Geochemistry, Chinese Academy of Sciences, Guangzhou 510640, China HIGHLIGHTS • Contamination profiles of 18 PFCs in the Yangtze River investigated • PFOA was the predominant PFAS contaminant both in water and sediment. • The annual mass loading of total PFASs was 20900 kg/year. • Wuhan and Er'zhou contributed the most amounts of PFASs into the Yangtze River. • No significant seasonal variations observed for most PFASs in water. • Most PFAS concentrations were correlated positively with TN both in water and sediment. article info abstract Article history: A systematic investigation into contamination profiles of eighteen perfluoroalkyl substances (PFASs) in both sur- Received 13 March 2014 face water and sediments of Yangtze River was carried out by using high performance liquid chromatography– Received in revised form 9 June 2014 tandem mass spectrometry (HPLC–MS/MS) in summer and winter of 2013. The total concentrations of the Accepted 10 June 2014 PFASs in the water and sediment of Yangtze River ranged from 2.2 to 74.56 ng/L and 0.05 to 1.44 ng/g dry weights Available online 28 June 2014 (dw), respectively. -
Leading New ICT Building a Smart Urban Rail
Leading New ICT Building A Smart Urban Rail 2017 HUAWEI TECHNOLOGIES CO., LTD. Bantian, Longgang District Shenzhen518129, P. R. China Tel:+86-755-28780808 Huawei Digital Urban Rail Solution Digital Urban Rail Solution LTE-M Solution 04 Next-Generation DCS Solution 10 Urban Rail Cloud Solution 15 Huawei Digital Urban Rail Solution Huawei Digital Urban Rail Solution Huawei LTE-M Solution for Urban Rail Huawei and Alstom the Completed World’s Huawei Digital Urban Rail LTE-M Solution First CBTC over LTE Live Pilot On June 29th, 2015, Huawei and Alstom, one of the world’s leading energy solutions and transport companies, announced the successful completion of the world’s first live pilot test of 4G LTE multi-services based on Communications- based Train Control (CBTC), a railway signalling system based on wireless ground-to-train CBTC PIS CCTV Dispatching communication. The successful pilot, which CURRENT STATUS IN URBAN RAIL covered the unified multi-service capabilities TV Wall ATS Server Terminal In recent years, public Wi-Fi access points have become a OCC of several systems including CBTC, Passenger popular commodity in urban areas. Due to the explosive growth Information System (PIS), and closed-circuit in use of multimedia devices like smart phones, tablets and NMS LTE CN television (CCTV), marks a major step forward in notebooks, the demand on services of these devices in crowded the LTE commercialization of CBTC services. Line/Station Section/Depot Station places such as metro stations has dramatically increased. Huge BBU numbers of Wi-Fi devices on the platforms and in the trains RRU create chances of interference with Wi-Fi networks, which TAU TAU Alstom is the world’s first train manufacturer to integrate LTE 4G into its signalling system solution, the Urbalis Fluence CBTC Train AR IPC PIS AP TCMS solution, which greatly improves the suitability of eLTE, providing a converged ground-to-train wireless communication network Terminal When the CBTC system uses Wi-Fi technology to implement for metro operations. -

Use Style: Paper Title
2019 4th International Conference on Education and Social Development (ICESD 2019) ISBN: 978-1-60595-621-3 Wuhan Subway Economic Development in the Perspective of "Innovation, Coordination, Green, Open, Sharing" Concept 1,a 2,b, Fang WANG and Xiao-sheng LEI * 1Hubei University of Traditional Chinese Medicine, Wuhan, Hubei, China 2Hubei University of Traditional Chinese Medicine, Wuhan, Hubei, China [email protected], [email protected] *Corresponding author Keywords: Development Concept, Wuhan, Subway Economy. Abstract. Since the 18th congress of the communist party of China, the "innovation, coordination, green, open and shared" development concept has been a profound change in the overall situation of China's development. In this context, the Wuhan Metro has developed rapidly, This paper analyzes the current situation, characteristics and influence of the development of subway economy in Wuhan from the perspective of development concept, and puts forward some suggestions for the future development of subway economy. Introduction For a long time, China has faced problems such as uneven, inadequate, uncoordinated and unsustainable development, and it has already faced the "ceiling dilemma". In recent years, China is facing the downward pressure of the economy. In order to change the development mode and solve the development problems, the 18th National Congress put forward five development concepts of “innovation, coordination, green, openness and sharing”, which have important guidance for the future development of social economy. Xiong'an New District is an innovative, coordinated, green ecological, open and co-constructed shared future urban model. Wuhan, following the glory of history, is becoming a reactivated city, and it must follow this development philosophy.