Generative Modelling and Artificial Intelligence for Structural Optimization of a Large Span Structure
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Panorama CPC December 2014 1 in the FIRST PERSON Nikolay Tokarev: “Transneft Highly Appreciates the Established Partner Relations”
December 2014 In Focus: CPC People p. 20–33 Contents: The General Director and Shareholders of the Consortium – on the results of 2014 6 p. 1–9 / Expansion Project: “We have learnt how to work together” 6 p. 10 / Year of Culture: A gift of new opportunities from CPC 6 p. 18 / About Love – in the female voice 6 p. 36 / Made in the USSR: the story of the construction of the first oil pipeline to the Black Sea 6 p. 40 IN THE FIRST PERSON Nikolay Brunich: “The 2014 Results: Call for Optimism.” DEAR COLLEAGUES, FRIENDS, The passing year, 2014, was the Consortium’s head offi ce in rich in important events and Moscow. Large scale construction will defi nitely enter CPC’s work is under way at the existing history as an important one for facilities, and oil transportation the development of the whole is continually increasing. The Consortium. We have completed successful combination of Phase 1 Expansion Project expansion and operation is facilities and are proceeding possible because we are one confi dently with Phase 2. With team and are capable of almost Facilities). Yury Belov is a relative new facilities already in operation unspoken understanding. At newcomer to the Consortium, but we will be able to achieve a regular meetings with CPC he has managed to quickly blend considerable increase in the regional supervisors I always into the team and has shown him- pipeline system’s throughput see for myself that they are well self to be a good leader. Well done! capacity. Prior to expansion, aware of how things are on the A true leader leads by personal ex- the pipeline transported Expansion Project, and are fully ample and creates a sense of team approximately 30 mln t of oil in control of the situation. -

Theories of Architecture Lecture-8- Architecture in the Beginnings of 20Th Century 1915- 1930
Theories of Architecture Lecture-8- Architecture in the beginnings of 20th century 1915- 1930 CONSTRUCTIVISM Prepared by Tara Azad Rauof This lecture Context: The Origin Characteristics of Constructivism A revolution in architecture Famous Constructivism Pioneers Constructivism [The Origin]: Constructivist architecture emerged from the wider constructivist art movement, which grew out of Russian Futurism in the Soviet Union in the 1920s and early 1930s. After the Russian Revolution of 1917 it turned its attentions to the new social demands and industrial tasks required of the new regime. Two distinguished approach emerged, the first was encapsulated in Antoine Pevsner's and Naum Gabo's Realist manifesto which was concerned with space and rhythm, the second represented those who argued for pure art and the Productivists, a more socially-oriented group who wanted this art to be absorbed in industrial production such as Vladimir Tatlin. A central aim of the Constructivists was instilling the avant-garde in everyday life. From 1927 they worked on projects for Workers' Clubs, communal leisure facilities usually built in factory districts. Among the most famous of these are the Kauchuk, Svoboda and Rusakov clubs. Characteristics of Constructivism: * Combined engineering and technology with political ideology. * Constructivist art had attempted to apply a three-dimensional cubist vision to wholly abstract non-objective 'constructions' with a characterized by movement element. * Technological details such as signs, and projection screens * Abstract geometric shapes. * Glass and steel * The term Constructivism has frequently been used since the 1920s, in a looser fashion, to evoke a continuing tradition of geometric abstract art constructed from autonomous visual elements such as lines and planes. -
Vladimir Shukhov Pipelines and Water Towers
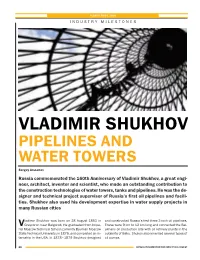
PLASTIC PIPES 2014 INDUSTRY MILESTONES VLADIMIR SHUKHOV PIPELINES AND WATER TOWERS Sergey Arssenev Russia commemorated the 160th Anniversary of Vladimir Shukhov, a great engi- neer, architect, inventor and scientist, who made an outstanding contribution to the construction technologies of water towers, tanks and pipelines. He was the de- signer and technical project supervisor of Russia’s first oil pipelines and facili- ties. Shukhov also used his development expertise in water supply projects in many Russian cities ladimir Shukhov was born on 28 August 1853 in and constructed Russia’s first three 3-inch oil pipelines. VGrayvoron near Belgorod. He graduated from Impe- These were 9 km to 12 km long and connected the Bal- rial Moscow Technical School (currently Bauman Moscow akhany oil production site with oil refinery plants in the State Technical University) in 1876, and completed an in- outskirts of Baku. Shukov also invented several types of ternship in the USA. In 1878–1879 Shukhov designed oil pumps. 68 ANNUAL INFORMATION AND ANALYTICAL DIGEST PLASTIC PIPES 2014 INDUSTRY MILESTONES In 1878 Shukhov designed and constructed the first cylindrical reservoirs / oil storages for the Baku oil pro- duction sites. Before Shukhovs’s reservoirs, oil was stored in drums and ponds and polluted the environment and soil. At the end of XIX, oil and oil products in the USA and Europe were stored in square tanks. The construc- tion office of Alexander Bari, where Shukhov was a Chief Engineer and a business partner, had built over 20,000 cylindrical reservoirs. Nowadays there are hun- dreds of thousands of reservoirs built all over the world using Shukhov’s design. -

Adventures in the Soviet Imaginary: Children’S Books and Graphic Art
Adventures in the Soviet Imaginary: Children’s Books and Graphic Art Twenty years after the demise of the Soviet Union, its culture continues to fascinate and mystify. Like other modern states, the Soviet Union exercised its power not only through direct coercion, but also through a vast media system that drew on the full power and range of modern technologies and aesthetic techniques. This media system not only served as a tool of central power, but also provided a relatively open space where individuals could construct their own meanings and identities. Children’s books and posters were two of the primary media through which a distinct Soviet imaginary was created, disseminated, and reinterpreted. Benefiting from the energy of young artists and from technological innovations in production, both media provided attractive and affordable products in huge print runs, sometimes reaching the hundreds of thousands. Despite the massive scale of production, their direct address and interactive construction encouraged a sense of individual autonomy, even as they enforced a sense of social belonging. Soviet images were unusually intensive, communicating enormous amounts of cultural information with immediacy and verve. But they were also extensive, achieving broad distribution through society, constantly being copied, reiterated, and transposed from one medium to another. While elite artists continued to exercise leadership in traditional media, professional graphic artists brought formal and thematic innovations into such mundane spaces as the workplace, the barracks, the school, and even the nursery. Thus Soviet cultural identity was shaped not only through state ideology and propaganda, but also through everyday activities that could be edifying, productive, and even fun. -

Architectural Geometry
Architectural geometry Item Type Article Authors Pottmann, Helmut; Eigensatz, Michael; Vaxman, Amir; Wallner, Johannes Citation Architectural geometry 2014, 47:145 Computers & Graphics Eprint version Post-print DOI 10.1016/j.cag.2014.11.002 Publisher Elsevier BV Journal Computers & Graphics Rights NOTICE: this is the author’s version of a work that was accepted for publication in Computers & Graphics. Changes resulting from the publishing process, such as peer review, editing, corrections, structural formatting, and other quality control mechanisms may not be reflected in this document. Changes may have been made to this work since it was submitted for publication. A definitive version was subsequently published in Computers & Graphics, 26 November 2014. DOI: 10.1016/j.cag.2014.11.002 Download date 05/10/2021 12:43:44 Link to Item http://hdl.handle.net/10754/555976 Architectural Geometry Helmut Pottmann a,b, Michael Eigensatz c, Amir Vaxman b, Johannes Wallner d aKing Abdullah University of Science and Technology, Thuwal 23955, Saudi Arabia bVienna University of Technology, 1040 Vienna, Austria cEvolute GmbH, 1040 Vienna, Austria dGraz University of Technology, 8010 Graz, Austria Abstract Around 2005 it became apparent in the geometry processing community that freeform architecture contains many problems of a geometric nature to be solved, and many opportunities for optimization which however require geometric understanding. This area of research, which has been called architectural geometry, meanwhile contains a great wealth of individual contributions which are relevant in various fields. For mathematicians, the relation to discrete differential geometry is significant, in particular the integrable system viewpoint. Besides, new application contexts have become available for quite some old-established concepts. -

Шухов Формула Архитектуры Shukhov. Formula of Architecture
Шухов Shukhov. Формула Formula архитектуры of Architecture Москва Moscow 2019 Издание приурочено Государственный научно- Участники выставки Каталог This book is published Schusev State Museum Project participants Catalogue к выставке «Шухов. исследовательский музей of Architecture архитектуры имени А. В. Щусева Архив Российской академии наук Составители on the occasion of the Archive of the Russian Academy Editors Формула архитектуры» (Москва) Марк Акопян, Елена Власова exhibition project Shukhov. Chief Curator of Collections of Sciences (Moscow) Mark Akopian, Elena Vlasova Парадная анфилада Главный хранитель Formula of Architecture M. Kostyuk Российский государственный архив Russian State Archive of Scientific and Государственного научно- М. А. Костюк Авторы Schusev State Museum Essay authors научно-технической документации Марк Акопян (Государственный Deputy Director of Education Technical Documentation (Moscow) исследовательского Заместитель директора (Москва) of Architecture K. Smirnova Mark Аkopian (Schusev State Museum научно-исследовательский музей Central State Archive of Moscow музея архитектуры по просветительской of Architecture, Moscow) Центральный государственный архитектуры имени А. В. Щусева, Enfilade Research Department for the деятельности Popov Central Museum имени А. В. Щусева архив города Москвы Москва) of the Main Building Storage of Unique Photographs Elena Vlasova (Schusev State Museum К. В. Смирнова of Communications (St. Petersburg) 22.10.2019 — 19.01.2020 M. Ametova, N. Askerko of Architecture, Moscow) Центральный музей связи имени Елена Власова (Государственный October 22, 2019 — Научный отдел хранения Central Museum of the Navy А. С. Попова (Санкт-Петербург) научно-исследовательский музей January 19, 2020 Research Department for the Matthias Beckh (Technische Кураторы уникальных фотографий (St. Petersburg) архитектуры имени А. В. Щусева, Storage of Three-Dimensional Universität Dresden, Germany) Марк Акопян, Елена Власова М. -

Building the Revolution. Soviet Art and Architecture, 1915
Press Dossier ”la Caixa” Social Outreach Programmes discovers at CaixaForum Madrid the art and architecture from the 1920s and 30s Building the Revolution. Soviet Art and Architecture 1915-1935 The Soviet State that emerged from the 1917 Russian Revolution fostered a new visual language aimed at building a new society based on the socialist ideal. The decade and a half that followed the Revolution was a period of intense activity and innovation in the field of the arts, particularly amongst architects, marked by the use of pure geometric forms. The new State required new types of building, from commune houses, clubs and sports facilities for the victorious proletariat, factories and power stations in order to bring ambitious plans for industrialisation to fruition, and operations centres from which to implement State policy and to broadcast propaganda, as well as such outstanding monuments as Lenin’s Mausoleum. Building the Revolution. Soviet Art and Architecture 1915-1935 illustrates one of the most exceptional periods in the history of architecture and the visual arts, one that is reflected in the engagement of such constructivist artists as Lyubov Popova and Alexander Rodchenko and and Russian architects like Konstantin Melnikov, Moisei Ginzburg and Alexander Vesnin, as well as the European architects Le Corbusier and Mendelsohn. The exhibition features some 230 works, including models, artworks (paintings and drawings) and photographs, featuring both vintage prints from the 1920s and 30s and contemporary images by the British photographer Richard Pare. Building the Revolution. Soviet Art and Architecture 1915-1935 , is organised by the Royal Academy of Arts of London in cooperation with ”la Caixa” Social Outreach Programmes and the SMCA-Costakis Collection of Thessaloniki. -

Shukhov Tower Watch Day to Be Held on March 19 and 20 in Moscow
SHUKHOV TOWER WATCH DAY TO BE HELD ON MARCH 19 AND 20 IN MOSCOW Two-Day Event Celebrates Shukhov Tower’s 94th Anniversary and Launch of Petition to Save the Modern Icon Press Conference to Discuss Issues Facing Shukhov Tower to be Held on March 19 NEW YORK, NEW YORK/MOSCOW, RUSSIA, March 9, 2016— A two-day event will take place on Saturday, March 19, and Sunday, March 20, 2016, in Moscow, Russia, to celebrate Shukhov Tower’s 94th anniversary and the launch of a petition to save the modern icon, which currently faces the threat of demolition. The tower is on the 2016 World Monuments Watch, World Monuments Fund’s biennial list of at-risk cultural heritage sites around the globe. A press conference on Saturday, March 19, at 3:00 p.m. (Moscow Time Zone) will be held to address Shukhov Tower’s current state and the petition to President Vladimir Putin on change.org to help save it. Events also include tours around the tower, a film screening, activities for children, tower reconstruction demonstrations, and more (see below for event details). Shukhov Tower, known after the name of its designer Vladimir Shukhov (1853-1939), is a landmark in the history of structural engineering. Built between 1919 and 1922, it is an emblem of the creative genius of an entire generation of modernist architects in the years that followed the Russian Revolution. Currently, the tower suffers from corrosion, a process which was accelerated due to inappropriate repairs carried out in the 1970s. The tower also sits close to the center of a growing Moscow, and demand for land, coupled with its poor condition and lack of public access, have led to the looming threat of demolition. -

Russian Architecture
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ КАЗАНСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ Кафедра иностранных языков RUSSIAN ARCHITECTURE Методические указания для студентов направлений подготовки 270100.62 «Архитектура», 270200.62 «Реставрация и реконструкция архитектурного наследия», 270300.62 «Дизайн архитектурной среды» Казань 2015 УДК 72.04:802 ББК 81.2 Англ. К64 К64 Russian architecture=Русская архитектура: Методические указания дляРусская архитектура:Методическиеуказаниядля студентов направлений подготовки 270100.62, 270200.62, 270300.62 («Архитектура», «Реставрация и реконструкция архитектурного наследия», «Дизайн архитектурной среды») / Сост. Е.Н.Коновалова- Казань:Изд-во Казанск. гос. архитект.-строит. ун-та, 2015.-22 с. Печатается по решению Редакционно-издательского совета Казанского государственного архитектурно-строительного университета Методические указания предназначены для студентов дневного отделения Института архитектуры и дизайна. Основная цель методических указаний - развить навыки самостоятельной работы над текстом по специальности. Рецензент кандидат архитектуры, доцент кафедры Проектирования зданий КГАСУ Ф.Д. Мубаракшина УДК 72.04:802 ББК 81.2 Англ. © Казанский государственный архитектурно-строительный университет © Коновалова Е.Н., 2015 2 Read the text and make the headline to each paragraph: KIEVAN’ RUS (988–1230) The medieval state of Kievan Rus'was the predecessor of Russia, Belarus and Ukraine and their respective cultures (including architecture). The great churches of Kievan Rus', built after the adoption of christianity in 988, were the first examples of monumental architecture in the East Slavic region. The architectural style of the Kievan state, which quickly established itself, was strongly influenced by Byzantine architecture. Early Eastern Orthodox churches were mainly built from wood, with their simplest form known as a cell church. Major cathedrals often featured many small domes, which has led some art historians to infer how the pagan Slavic temples may have appeared. -

Richard Pare Press Release.Indd
FOR IMMEDIATE RELEASE ‘The Lost Vanguard: Soviet Modernist Architecture, 1922–32’ on view at the Graham Foundation for Advanced Studies in the Fine Arts October 11, 2012–February 16, 2013. Richard Pare, Melnikov House, Moscow, Russia. Konstantin Melnikov, 1927-31. Photograph Copyright Richard Pare 2007. Chicago, August 23, 2012 – The Graham Foundation is pleased to present The Lost Vanguard: Soviet Modernist Architecture, 1922-32, an exhibition documenting the work of modernist architects in the Soviet Union in the years following the 1917 revolution and the period of instability during the subsequent civil war. In little more than a decade, some of the most radical buildings of the twentieth century were completed by a small group of architects who developed a new architectural language in support of social goals of communal life. Rarely published and virtually inaccessible until the collapse of the Soviet regime, these important buildings have remained unknown and unappreciated. Installed throughout all three floors of the Graham Foundation’s Madlener House, the exhibition consists of over eighty large-scale photographs of Soviet structures from the first revolutionary period documented by British photographer Richard Pare as he found them during extensive visits between 1992–2010. The structures featured in the exhibition are located in a wide territory spanning the old Soviet Union that includes Azerbaijan, Ukraine, Georgia, and Russia, and were drawn from an archive of about 15,000 photographs taken by Pare. Selections from this body of work were first exhibited at the Ruina, an annex of the Shchusev State Museum of Architecture (MUAR) in Moscow. The Lost Vanguard exhibition originated at the Museum of Modern Art, New York organized by Barry Bergdoll, with guest curator Jean-Louis Cohen. -

Industrial Process Industrial Process
INDUSTRIAL PROCESS INDUSTRIAL PROCESS SESSION 10 PETROLEUM AND ORGANIC COMPOUNDS SESSION 10 Petroleum and organic compounds Session 10 Petroleum and organic compounds The nature of an organic molecule means it can be transformed at the molecular level to create a range of products. Cracking (chemistry) - the generic term for breaking up the larger molecules. Alkylation - refining of crude oil Burton process - cracking of hydrocarbons Cumene process - making phenol and acetone from benzene Friedel-Crafts reaction, Kolbe-Schmitt reaction Olefin metathesis, Thermal depolymerization Transesterification - organic chemicals Raschig process - part of the process to produce nylon Oxo process - Produces aldehydes from alkenes. Polymerisation . Cracking (chemistry) In petroleum geology and chemistry, cracking is the process whereby complex organic molecules such as kerogens or heavy hydrocarbons are broken down into simpler molecules such as light hydrocarbons, by the breaking of carbon- carbon bonds in the precursors. The rate of cracking and the end products are strongly dependent on the temperature and presence of catalysts. Cracking is the breakdown of a large alkane into smaller, more useful alkanes and alkenes. Simply put, hydrocarbon cracking is the process of breaking a long-chain of hydrocarbons into short ones. More loosely, outside the field of petroleum chemistry, the term "cracking" is used to describe any type of splitting of molecules under the influence of heat, catalysts and solvents, such as in processes of destructive distillation or pyrolysis. Fluid catalytic cracking produces a high yield of gasoline and LPG, while hydrocracking is a major source of jet fuel, Diesel fuel, naphtha, and LPG.[ 1 Refinery using the Shukhov cracking process, Baku, Soviet Union, 1934. -

Industry and Society in Baku, Azerbaijan, 1870- Present
OIL CAPITAL: INDUSTRY AND SOCIETY IN BAKU, AZERBAIJAN, 1870- PRESENT by REBECCA LINDSAY HASTINGS A DISSERTATION Presented to the Department of History and the Graduate School of the University of Oregon in partial fulfillment of the requirements for the degree of Doctor of Philosophy June 2020 DISSERTATION APPROVAL PAGE Student: Rebecca Lindsay Hastings Title: Oil Capital: Industry and Society in Baku, Azerbaijan, 1870-Present This dissertation has been accepted and approved in partial fulfillment of the requirements for the Doctor of Philosophy degree in the Department of History by: Julie Hessler Chairperson, Advisor Julie Weise Core Member Ryan Jones Core Member Alexander Murphy Institutional Representative and Kate Mondloch Interim Vice Provost and Dean of the Graduate School Original approval signatures are on file with the University of Oregon Graduate School Degree awarded June 2020 ii © 2020 Rebecca Lindsay Hastings iii DISSERTATION ABSTRACT Rebecca Lindsay Hastings Doctor of Philosophy Department of History June 2020 Title: Oil Capital: Industry and Society in Baku, Azerbaijan, 1870-Present This dissertation is a historical study of the city of Baku, Azerbaijan, and its oil industry from the 1870s to the present, covering the tsarist Russian, Soviet, and post- Soviet eras. The history of the Baku oil industry offers a clear, focused example of the social and physical effects of the imposition of external parties’ financial and commodity demands on an urban-industrial setting. Baku as an urban environment, comprising not just the physical elements of the city but also its sociocultural communities, has embodied priorities imposed on the oil industry that have shifted as the global importance of oil and natural gas has grown, as those commodities’ uses have changed over time, and according to successive regimes’ respective political and economic ideologies.