Geodetic Computations on Triaxial Ellipsoid
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Reference Systems for Surveying and Mapping Lecture Notes
Delft University of Technology Reference Systems for Surveying and Mapping Lecture notes Hans van der Marel ii The front cover shows the NAP (Amsterdam Ordnance Datum) ”datum point” at the Stopera, Amsterdam (picture M.M.Minderhoud, Wikipedia/Michiel1972). H. van der Marel Lecture notes on Reference Systems for Surveying and Mapping: CTB3310 Surveying and Mapping CTB3425 Monitoring and Stability of Dikes and Embankments CIE4606 Geodesy and Remote Sensing CIE4614 Land Surveying and Civil Infrastructure February 2020 Publisher: Faculty of Civil Engineering and Geosciences Delft University of Technology P.O. Box 5048 Stevinweg 1 2628 CN Delft The Netherlands Copyright ©20142020 by H. van der Marel The content in these lecture notes, except for material credited to third parties, is licensed under a Creative Commons AttributionsNonCommercialSharedAlike 4.0 International License (CC BYNCSA). Third party material is shared under its own license and attribution. The text has been type set using the MikTex 2.9 implementation of LATEX. Graphs and diagrams were produced, if not mentioned otherwise, with Matlab and Inkscape. Preface This reader on reference systems for surveying and mapping has been initially compiled for the course Surveying and Mapping (CTB3310) in the 3rd year of the BScprogram for Civil Engineering. The reader is aimed at students at the end of their BSc program or at the start of their MSc program, and is used in several courses at Delft University of Technology. With the advent of the Global Positioning System (GPS) technology in mobile (smart) phones and other navigational devices almost anyone, anywhere on Earth, and at any time, can determine a three–dimensional position accurate to a few meters. -

Curvilinear Coordinate Systems
Appendix A Curvilinear coordinate systems Results in the main text are given in one of the three most frequently used coordinate systems: Cartesian, cylindrical or spherical. Here, we provide the material necessary for formulation of the elasticity problems in an arbitrary curvilinear orthogonal coor- dinate system. We then specify the elasticity equations for four coordinate systems: elliptic cylindrical, bipolar cylindrical, toroidal and ellipsoidal. These coordinate systems (and a number of other, more complex systems) are discussed in detail in the book of Blokh (1964). The elasticity equations in general curvilinear coordinates are given in terms of either tensorial or physical components. Therefore, explanation of the relationship between these components and the necessary background are given in the text to follow. Curvilinear coordinates ~i (i = 1,2,3) can be specified by expressing them ~i = ~i(Xl,X2,X3) in terms of Cartesian coordinates Xi (i = 1,2,3). It is as- sumed that these functions have continuous first partial derivatives and Jacobian J = la~i/axjl =I- 0 everywhere. Surfaces ~i = const (i = 1,2,3) are called coordinate surfaces and pairs of these surfaces intersects along coordinate curves. If the coordinate surfaces intersect at an angle :rr /2, the curvilinear coordinate system is called orthogonal. The usual summation convention (summation over repeated indices from 1 to 3) is assumed, unless noted otherwise. Metric tensor In Cartesian coordinates Xi the square of the distance ds between two neighboring points in space is determined by ds 2 = dxi dXi Since we have ds2 = gkm d~k d~m where functions aXi aXi gkm = a~k a~m constitute components of the metric tensor. -

Analytical Results Regarding Electrostatic Resonances of Surface Phonon/Plasmon Polaritons: Separation of Variables with a Twist
Analytical results regarding electrostatic resonances of surface phonon/plasmon polaritons: separation of variables with a twist R. C. Voicu1 and T. Sandu1 1Research Centre for Integrated Systems, Nanotechnologies, and Carbon Based Materials, National Institute for Research and Development in Microtechnologies-IMT, 126A, Erou Iancu Nicolae Street, Bucharest, ROMANIA∗ (Dated: February 16, 2017) Abstract The boundary integral equation method ascertains explicit relations between localized surface phonon and plasmon polariton resonances and the eigenvalues of its associated electrostatic opera- tor. We show that group-theoretical analysis of Laplace equation can be used to calculate the full set of eigenvalues and eigenfunctions of the electrostatic operator for shapes and shells described by separable coordinate systems. These results not only unify and generalize many existing studies but also offer the opportunity to expand the study of phenomena like cloaking by anomalous localized resonance. For that reason we calculate the eigenvalues and eigenfunctions of elliptic and circular cylinders. We illustrate the benefits of using the boundary integral equation method to interpret recent experiments involving localized surface phonon polariton resonances and the size scaling of plasmon resonances in graphene nano-disks. Finally, symmetry-based operator analysis can be extended from electrostatic to full-wave regime. Thus, bound states of light in the continuum can be studied for shapes beyond spherical configurations. PACS numbers: 02.20.Sv,02.30.Em,02.30.Uu,41.20.Cv,63.22.-m,78.67.Bf arXiv:1702.04655v1 [cond-mat.mes-hall] 15 Feb 2017 ∗Electronic address: [email protected] 1 I. INTRODUCTION Materials with negative permittivity allow light confinement to sub-diffraction limit and field enhancement at the interface with ordinary dielectrics [1]. -

Computer Facilitated Generalized Coordinate Transformations of Partial Differential Equations with Engineering Applications
Computer Facilitated Generalized Coordinate Transformations of Partial Differential Equations With Engineering Applications A. ELKAMEL,1 F.H. BELLAMINE,1,2 V.R. SUBRAMANIAN3 1Department of Chemical Engineering, University of Waterloo, 200 University Avenue West, Waterloo, Ontario, Canada N2L 3G1 2National Institute of Applied Science and Technology in Tunis, Centre Urbain Nord, B.P. No. 676, 1080 Tunis Cedex, Tunisia 3Department of Chemical Engineering, Tennessee Technological University, Cookeville, Tennessee 38505 Received 16 February 2008; accepted 2 December 2008 ABSTRACT: Partial differential equations (PDEs) play an important role in describing many physical, industrial, and biological processes. Their solutions could be considerably facilitated by using appropriate coordinate transformations. There are many coordinate systems besides the well-known Cartesian, polar, and spherical coordinates. In this article, we illustrate how to make such transformations using Maple. Such a use has the advantage of easing the manipulation and derivation of analytical expressions. We illustrate this by considering a number of engineering problems governed by PDEs in different coordinate systems such as the bipolar, elliptic cylindrical, and prolate spheroidal. In our opinion, the use of Maple or similar computer algebraic systems (e.g. Mathematica, Reduce, etc.) will help researchers and students use uncommon transformations more frequently at the very least for situations where the transformations provide smarter and easier solutions. ß2009 Wiley Periodicals, Inc. Comput Appl Eng Educ 19: 365À376, 2011; View this article online at wileyonlinelibrary.com; DOI 10.1002/cae.20318 Keywords: partial differential equations; symbolic computation; Maple; coordinate transformations INTRODUCTION usual Cartesian, polar, and spherical coordinates. For example, Figure 1 shows two identical pipes imbedded in a concrete slab. -

Advanced Positioning for Offshore Norway
Advanced Positioning for Offshore Norway Thomas Alexander Sahl Petroleum Geoscience and Engineering Submission date: June 2014 Supervisor: Sigbjørn Sangesland, IPT Co-supervisor: Bjørn Brechan, IPT Norwegian University of Science and Technology Department of Petroleum Engineering and Applied Geophysics Summary When most people hear the word coordinates, they think of latitude and longitude, variables that describe a location on a spherical Earth. Unfortunately, the reality of the situation is far more complex. The Earth is most accurately represented by an ellipsoid, the coordinates are three-dimensional, and can be found in various forms. The coordinates are also ambiguous. Without a proper reference system, a geodetic datum, they have little meaning. This field is what is known as "Geodesy", a science of exactly describing a position on the surface of the Earth. This Thesis aims to build the foundation required for the position part of a drilling software. This is accomplished by explaining, in detail, the field of geodesy and map projections, as well as their associated formulae. Special considerations is taken for the area offshore Norway. Once the guidelines for transformation and conversion have been established, the formulae are implemented in MATLAB. All implemented functions are then verified, for every conceivable method of opera- tion. After which, both the limitation and accuracy of the various functions are discussed. More specifically, the iterative steps required for the computation of geographic coordinates, the difference between the North Sea Formulae and the Bursa-Wolf transformation, and the accuracy of Thomas-UTM series for UTM projections. The conclusion is that the recommended guidelines have been established and implemented. -

Map Projections and Coordinate Systems Datums Tell Us the Latitudes and Longi- Vertex, Node, Or Grid Cell in a Data Set, Con- Tudes of Features on an Ellipsoid
116 GIS Fundamentals Map Projections and Coordinate Systems Datums tell us the latitudes and longi- vertex, node, or grid cell in a data set, con- tudes of features on an ellipsoid. We need to verting the vector or raster data feature by transfer these from the curved ellipsoid to a feature from geographic to Mercator coordi- flat map. A map projection is a systematic nates. rendering of locations from the curved Earth Notice that there are parameters we surface onto a flat map surface. must specify for this projection, here R, the Nearly all projections are applied via Earth’s radius, and o, the longitudinal ori- exact or iterated mathematical formulas that gin. Different values for these parameters convert between geographic latitude and give different values for the coordinates, so longitude and projected X an Y (Easting and even though we may have the same kind of Northing) coordinates. Figure 3-30 shows projection (transverse Mercator), we have one of the simpler projection equations, different versions each time we specify dif- between Mercator and geographic coordi- ferent parameters. nates, assuming a spherical Earth. These Projection equations must also be speci- equations would be applied for every point, fied in the “backward” direction, from pro- jected coordinates to geographic coordinates, if they are to be useful. The pro- jection coordinates in this backward, or “inverse,” direction are often much more complicated that the forward direction, but are specified for every commonly used pro- jection. Most projection equations are much more complicated than the transverse Mer- cator, in part because most adopt an ellipsoi- dal Earth, and because the projections are onto curved surfaces rather than a plane, but thankfully, projection equations have long been standardized, documented, and made widely available through proven programing libraries and projection calculators. -

Conversion of Latitude and Longitude to UTM Coordinates
Paper 410, CCG Annual Report 11 , 2009 (© 2009) Conversion of Latitude and Longitude to UTM Coordinates John G. Manchuk The frame of reference is an important aspect of natural resource modeling. Two principal coordinate systems are encountered in resource analysis: latitude and longitude and universal transverse Mercator or UTM. Operations can also have their own local coordinate system that is defined within a specific lease area; however, these are typically just translated and/or rotated UTM coordinates. This paper reviews some of the basics behind these two coordinate systems and describes a program for conversion. Introduction Map projections are useful for presentation purposes and to simplify calculations of distances, areas, and volumes. In the earth’s coordinate system, which is ellipsoidal, these computations can be cumbersome. The two coordinate systems that are explained here are the ellipsoidal coordinates defining the earth having longitude, latitude, and height axes, and universal transverse Mercator (UTM) coordinates which is a map projection to a cylindrical coordinate system that is discretized into a set of zones, each being an approximate Cartesian system with East and North coordinates. Of course, coordinate systems require a point of reference or datum. Defining latitude and longitude from an ellipsoidal model of the earth is only possible by defining a point of reference on the ellipsoid. For the World Geodetic System of 1984 (WGS 84) defined principally for the global positioning system (GPS), the reference is a series of monitoring stations positioned on the earth with known coordinates. This provides an ellipsoid that fits the earth, or geoid, with minimal error in height between them. -

Path Integral Discussion for Smorodinsky-Winternitz Potentials: I
best; sq V 0// 8 qw Fw ro DESY 94-018 February 1994 Path Integral Discussion for Smorodinsky-Winternitz Potentials: I. Two- and Three Dimensional Euclidean Space C. Grosche II. Institut hir Theoretische Physik, Universitat Hamburg G. S. Pogosyan, A. N. Sissakian Laboratory of Theoretical Physics, Joint Institute for Nuclear Research, Dubna, Moscow Region, Russia naml\\\\\\\\\\\ Lraanexas. 1\\\l\\ll\\\ smava ISSN 0418-9833 OCR Output OCR OutputDESY 94 - 018 ISSN 0418 - 9833 February 1994 hep-th/9402121 PATH INTEGRAL DISCUSSION FOR SMORODINSKY-WINTERNITZ POTENTIALS: I. TWO- AND THREE DIMENSIONAL EUCLIDEAN SPACE C. Grosche* II. Institut fur Theoretische Physik Universitat Hamburg, Luruper Chaussee 149 22761 Hamburg, Germany G. S. Pog0syan** and A. N. Sissakian* Laboratory of Theoretical Physics Joint Institute for Nuclear Research (Dubna} 141980 Dubna, Moscow Region, Russia Abstract Path integral formulations for the Smorodinsky-Winternitz potentials in two- and three dimensional Euclidean space are presented. We mention all coordinate systems which sep arate the Smorodinsky-Winternitz potentials and state the corresponding path integral for mulations. Whereas in many coordinate systems an explicit path integral formulation is not possible, we list in all soluble cases the path integral evaluations explicitly in terms of the propagators and the spectral expansions into the wave-functions. Supported by Deutsche Forschungsgemeinschaft under contract number GR 1031/2-1. Supported by Heisenberg-Landau program. OCR Output OCR Output1. Introduction. In the study of the Kepler problem and therharmonic oscillator it turns out that they possess properties making them of special interest, for instance, all finite classical trajectories are closed and all energy eigen-values are multiply degenerated. -

China Geodetic Coordinate System 2000*
UNITED NATIONS E/CONF.100/CRP.16 ECONOMIC AND SOCIAL COUNCIL Eighteenth United Nations Regional Cartographic Conference for Asia and the Pacific Bangkok, 26-29 October 2009 Item 7(a) of the provisional agenda Country Reports China Geodetic Coordinate System 2000* * Prepared by Pengfei Cheng, Hanjiang Wen, Yingyan Cheng, Hua Wang, Chinese Academy of Surveying and Mapping China Geodetic Coordinate System 2000 CHENG Pengfei,WEN Hanjiang,CHENG Yingyan, WANG Hua Chinese Academy of Surveying and Mapping, Beijing 100039, China Abstract Two national geodetic coordinate systems have been used in China since 1950’s, i.e., the Beijing geodetic coordinate system 1954 and Xi’an geodetic coordinate system 1980. As non-geocentric and local systems, they were established based on national astro-geodetic network. Since 1990, several national GPS networks have been established for different applications in China, such as the GPS networks of order-A and order-B established by the State Bureau of Surveying and Mapping in 1997 were mainly used for the geodetic datum. A combined adjustment was carried out to unify the reference frame and the epoch of the control points of these GPS networks, and the national GPS control network 2000(GPS2000) was established afterwards. In order to establish the connection between CGCS2000 and the old coordinate systems and to get denser control points, so that the geo-information products can be transformed into the new system, the combined adjustment between the astro-geodetic network and GPS2000 network were also completed. China Geodetic Coordinate System 2000(CGCS2000) has been adopted as the new national geodetic reference system since July 2008,which will be used to replace the old systems. -

A Global Vertical Datum Defined by the Conventional Geoid Potential And
Journal of Geodesy (2019) 93:1943–1961 https://doi.org/10.1007/s00190-019-01293-3 ORIGINAL ARTICLE A global vertical datum defined by the conventional geoid potential and the Earth ellipsoid parameters Hadi Amin1 · Lars E. Sjöberg1,2 · Mohammad Bagherbandi1,2 Received: 24 January 2019 / Accepted: 22 August 2019 / Published online: 12 September 2019 © The Author(s) 2019 Abstract The geoid, according to the classical Gauss–Listing definition, is, among infinite equipotential surfaces of the Earth’s gravity field, the equipotential surface that in a least squares sense best fits the undisturbed mean sea level. This equipotential surface, except for its zero-degree harmonic, can be characterized using the Earth’s global gravity models (GGM). Although, nowadays, satellite altimetry technique provides the absolute geoid height over oceans that can be used to calibrate the unknown zero- degree harmonic of the gravimetric geoid models, this technique cannot be utilized to estimate the geometric parameters of the mean Earth ellipsoid (MEE). The main objective of this study is to perform a joint estimation of W 0, which defines the zero datum of vertical coordinates, and the MEE parameters relying on a new approach and on the newest gravity field, mean sea surface and mean dynamic topography models. As our approach utilizes both satellite altimetry observations and a GGM model, we consider different aspects of the input data to evaluate the sensitivity of our estimations to the input data. Unlike previous studies, our results show that it is not sufficient to use only the satellite-component of a quasi-stationary GGM to estimate W 0. -
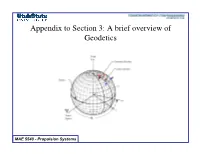
Appendix to Section 3: a Brief Overview of Geodetics
Appendix to Section 3: A brief overview of Geodetics MAE 5540 - Propulsion Systems Geodesy • Navigation Geeks do Calculations in Geocentric (spherical) Coordinates • Map Makers Give Surface Data in Terms !earth of Geodetic (elliptical) Coordinates • Need to have some idea how to relate one to another -- science of geodesy MAE 5540 - Propulsion Systems How Does the Earth Radius Vary with Latitude? k z ? 2 ? 2 REarth = x + y2 + z = r + z r R " Ellipse: y j ! r 2 + z 2 = 1 j 2 Req Req 1 - eEarth y x i "a" "b" r Prime Meridian ! x MAE 5540 - Propulsion Systems How Does the Earth Radius vary with Latitude? r 2 + z 2 = 1 2 Req Req 1 - eEarth ! 2 2 2 2 2 1 - eEarth r + z = Req 1 - eEarth ! z 2 2 2 2 z 2 r Req = r + 2 = r 1 + 2 1 - eEarth 1 - eEarth Rearth z " r 2 2 2 z 2 2 r = Rearth cos " r = tan " MAE 5540 - Propulsion Systems How Does the Earth Radius vary with Latitude? 2 2 Req 2 tan ! 2 = cos ! 1 + 2 = Rearth 1 - eEarth 2 2 2 1 - eEarth cos ! + sin ! 2 = 1 - eEarth Inverting .... 2 2 2 2 2 2 cos ! + sin ! - eEarth cos ! 1 - eEarth cos ! 2 = 2 1 - eEarth 1 - eEarth R earth ! = 2 Req 1 - eEarth 2 2 1 - eEarth cos ! MAE 5540 - Propulsion Systems Earth Radius vs Geocentric Latitude R earth ! = Polar Radius: 6356.75170 km 2 Req 1 - eEarth Equatorial Radius: 6378.13649 km 2 2 1 - eEarth cos ! 2 2 2 e = 1 - b = a - b = Earth a a2 6378.13649 2 6378.136492 - = 0.08181939 6378.13649 MAE 5540 - Propulsion Systems Earth Radius vs Geocentric Latitude (concluded) 6380. -

New Solutions for the Geoid Potential W0 and the Mean Earth Ellipsoid Dimensions
Journal of Geodetic Science • 3(4) • 2013 • 258-265 DOI: 10.2478/jogs-2013-0031 • New solutions for the geoid potential W 0 and the Mean Earth Ellipsoid dimensions Research Article L. E. Sjöberg Royal Institute of Technology, Stockholm, Sweden Abstract: Earth Gravitational Models (EGMs) describe the Earth’s gravity field including the geoid, except for its zero-degree harmonic, whichisa scaling parameter that needs a known geometric distance for its calibration. Today this scale can be provided by the absolute geoid height as estimated from satellite altimetry at sea. On the contrary, the above technique cannot be used to determine the geometric parameters of the Mean Earth Ellipsoidal (MEE), as this problem needs global data of both satellite altimetry and gravimetric geoid models, and the standard technique used today leads to a bias for the unknown zero-degree harmonic of the gravimetric geoid height model. Here we present a new method that eliminates this problem and simultaneously determines the potential of the geoid (W0) and the MEE axes. As the resulting equations are non-linear, the linearized observation equations are also presented. Keywords: Geoid datum • global vertical datum • Mean Earth Ellipsoid • reference ellipsoid © 2013 L. E. Sjöberg, licensee Versita Sp. z o. o. This work is licensed under the Creative Commons Attribution-NonCommercial-NoDerivs license, which means that the text may be used for non-commercial purposes, provided credit is given to the author. Received 20-06-2013; accepted 16-10-2013 1. Introduction The event of satellite altimetry in the 1970s provided a tool for the realization of a GVD as being the equipotential surface of the Earth’s gravity field that minimizes the sea surface topography The level surface of the Earth’s gravity field defined by the undis- (SST) all over the oceans in a least squares sense (Mather 1978).