Tutorial Ellipsoid, Geoid, Gravity, Geodesy, and Geophysics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Fast Method for Calculation of Marine Gravity Anomaly
applied sciences Article A Fast Method for Calculation of Marine Gravity Anomaly Yuan Fang 1, Shuiyuan He 2,*, Xiaohong Meng 1,*, Jun Wang 1, Yongkang Gan 1 and Hanhan Tang 1 1 School of Geophysics and Information Technology, China University of Geosciences, Beijing 100083, China; [email protected] (Y.F.); [email protected] (J.W.); [email protected] (Y.G.); [email protected] (H.T.) 2 Guangzhou Marine Geological Survey, China Geological Survey, Ministry of Land and Resources, Guangzhou 510760, China * Correspondence: [email protected] (S.H.); [email protected] (X.M.); Tel.: +86-136-2285-1110 (S.H.); +86-136-9129-3267 (X.M.) Abstract: Gravity data have been playing an important role in marine exploration and research. However, obtaining gravity data over an extensive marine area is expensive and inefficient. In reality, marine gravity anomalies are usually calculated from satellite altimetry data. Over the years, numer- ous methods have been presented for achieving this purpose, most of which are time-consuming due to the integral calculation over a global region and the singularity problem. This paper proposes a fast method for the calculation of marine gravity anomalies. The proposed method introduces a novel scheme to solve the singularity problem and implements the parallel technique based on a graphics processing unit (GPU) for fast calculation. The details for the implementation of the proposed method are described, and it is tested using the geoid height undulation from the Earth Gravitational Model 2008 (EGM2008). The accuracy of the presented method is evaluated by comparing it with marine shipboard gravity data. -

THE EARTH's GRAVITY OUTLINE the Earth's Gravitational Field
GEOPHYSICS (08/430/0012) THE EARTH'S GRAVITY OUTLINE The Earth's gravitational field 2 Newton's law of gravitation: Fgrav = GMm=r ; Gravitational field = gravitational acceleration g; gravitational potential, equipotential surfaces. g for a non–rotating spherically symmetric Earth; Effects of rotation and ellipticity – variation with latitude, the reference ellipsoid and International Gravity Formula; Effects of elevation and topography, intervening rock, density inhomogeneities, tides. The geoid: equipotential mean–sea–level surface on which g = IGF value. Gravity surveys Measurement: gravity units, gravimeters, survey procedures; the geoid; satellite altimetry. Gravity corrections – latitude, elevation, Bouguer, terrain, drift; Interpretation of gravity anomalies: regional–residual separation; regional variations and deep (crust, mantle) structure; local variations and shallow density anomalies; Examples of Bouguer gravity anomalies. Isostasy Mechanism: level of compensation; Pratt and Airy models; mountain roots; Isostasy and free–air gravity, examples of isostatic balance and isostatic anomalies. Background reading: Fowler §5.1–5.6; Lowrie §2.2–2.6; Kearey & Vine §2.11. GEOPHYSICS (08/430/0012) THE EARTH'S GRAVITY FIELD Newton's law of gravitation is: ¯ GMm F = r2 11 2 2 1 3 2 where the Gravitational Constant G = 6:673 10− Nm kg− (kg− m s− ). ¢ The field strength of the Earth's gravitational field is defined as the gravitational force acting on unit mass. From Newton's third¯ law of mechanics, F = ma, it follows that gravitational force per unit mass = gravitational acceleration g. g is approximately 9:8m/s2 at the surface of the Earth. A related concept is gravitational potential: the gravitational potential V at a point P is the work done against gravity in ¯ P bringing unit mass from infinity to P. -
The Global Positioning System the Global Positioning System
The Global Positioning System The Global Positioning System 1. System Overview 2. Biases and Errors 3. Signal Structure and Observables 4. Absolute v. Relative Positioning 5. GPS Field Procedures 6. Ellipsoids, Datums and Coordinate Systems 7. Mission Planning I. System Overview ! GPS is a passive navigation and positioning system available worldwide 24 hours a day in all weather conditions developed and maintained by the Department of Defense ! The Global Positioning System consists of three segments: ! Space Segment ! Control Segment ! User Segment Space Segment Space Segment ! The current GPS constellation consists of 29 Block II/IIA/IIR/IIR-M satellites. The first Block II satellite was launched in February 1989. Control Segment User Segment How it Works II. Biases and Errors Biases GPS Error Sources • Satellite Dependent ? – Orbit representation ? Satellite Orbit Error Satellite Clock Error including 12 biases ? 9 3 Selective Availability 6 – Satellite clock model biases Ionospheric refraction • Station Dependent L2 L1 – Receiver clock biases – Station Coordinates Tropospheric Delay • Observation Multi- pathing Dependent – Ionospheric delay 12 9 3 – Tropospheric delay Receiver Clock Error 6 1000 – Carrier phase ambiguity Satellite Biases ! The satellite is not where the GPS broadcast message says it is. ! The satellite clocks are not perfectly synchronized with GPS time. Station Biases ! Receiver clock time differs from satellite clock time. ! Uncertainties in the coordinates of the station. ! Time transfer and orbital tracking. Observation Dependent Biases ! Those associated with signal propagation Errors ! Residual Biases ! Cycle Slips ! Multipath ! Antenna Phase Center Movement ! Random Observation Error Errors ! In addition to biases factors effecting position and/or time determined by GPS is dependant upon: ! The geometric strength of the satellite configuration being observed (DOP). -

Ts 144 031 V12.3.0 (2015-07)
ETSI TS 1144 031 V12.3.0 (201515-07) TECHNICAL SPECIFICATION Digital cellular telecocommunications system (Phahase 2+); Locatcation Services (LCS); Mobile Station (MS) - SeServing Mobile Location Centntre (SMLC) Radio Resosource LCS Protocol (RRLP) (3GPP TS 44.0.031 version 12.3.0 Release 12) R GLOBAL SYSTTEM FOR MOBILE COMMUNUNICATIONS 3GPP TS 44.031 version 12.3.0 Release 12 1 ETSI TS 144 031 V12.3.0 (2015-07) Reference RTS/TSGG-0244031vc30 Keywords GSM ETSI 650 Route des Lucioles F-06921 Sophia Antipolis Cedex - FRANCE Tel.: +33 4 92 94 42 00 Fax: +33 4 93 65 47 16 Siret N° 348 623 562 00017 - NAF 742 C Association à but non lucratif enregistrée à la Sous-Préfecture de Grasse (06) N° 7803/88 Important notice The present document can be downloaded from: http://www.etsi.org/standards-search The present document may be made available in electronic versions and/or in print. The content of any electronic and/or print versions of the present document shall not be modified without the prior written authorization of ETSI. In case of any existing or perceived difference in contents between such versions and/or in print, the only prevailing document is the print of the Portable Document Format (PDF) version kept on a specific network drive within ETSI Secretariat. Users of the present document should be aware that the document may be subject to revision or change of status. Information on the current status of this and other ETSI documents is available at http://portal.etsi.org/tb/status/status.asp If you find errors in the present document, please send your comment to one of the following services: https://portal.etsi.org/People/CommiteeSupportStaff.aspx Copyright Notification No part may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying and microfilm except as authorized by written permission of ETSI. -

B3 : Variation of Gravity with Latitude and Elevation
Geophysics 210 September 2008 B3 Variation of gravity with latitude and elevation By measuring the subtle changes in the acceleration of gravity from one place to another, it is possible to learn about changes in subsurface density. However, other factors can cause gravity to vary with position on the Earth. These effects must be removed from measurements in order to use gravity data to study the interior of the Earth. B3.1 Variation of gravity with latitude It is observed that at the Equator, g E = 978,033 mgal while at the poles g P = 983,219 mgal This difference is 5186 mgal, which is a lot larger than changes in gravity because of subsurface density. Can this observation be explained by the fact that the Earth is a rotating ellipsoid? (A)The Earth is distorted by rotation The Earth is an oblate spheroid. R E = 6378 km R P = 6357 km. Qualitative answer Since a point on the Equator is further from the centre of the Earth than the poles, gravity will be weaker at the Equator and g E < g P Quantitative answer GM E 24 For a sphere g (r) = where the mass of the Earth, ME = 5.957 10 kg. r 2 At the North Pole, RP = 6357 km and g P = 983,219 mgal. If we move up 21 km to the equator, the decrease in gravity will be 6467 mgal Thus g E = g P - 6467 mgal, which is too much to explain the observed difference between the Equator and the Poles. 1 Geophysics 210 September 2008 (B) - Centrifugal forces vary with latitude The rotation of the Earth also causes gravity to vary with latitude. -

Detection of Caves by Gravimetry
Detection of Caves by Gravimetry By HAnlUi'DO J. Cmco1) lVi/h plates 18 (1)-21 (4) Illtroduction A growing interest in locating caves - largely among non-speleolo- gists - has developed within the last decade, arising from industrial or military needs, such as: (1) analyzing subsUl'face characteristics for building sites or highway projects in karst areas; (2) locating shallow caves under airport runways constructed on karst terrain covered by a thin residual soil; and (3) finding strategic shelters of tactical significance. As a result, geologists and geophysicists have been experimenting with the possibility of applying standard geophysical methods toward void detection at shallow depths. Pioneering work along this line was accomplishecl by the U.S. Geological Survey illilitary Geology teams dUl'ing World War II on Okinawan airfields. Nicol (1951) reported that the residual soil covel' of these runways frequently indicated subsi- dence due to the collapse of the rooves of caves in an underlying coralline-limestone formation (partially detected by seismic methods). In spite of the wide application of geophysics to exploration, not much has been published regarding subsUl'face interpretation of ground conditions within the upper 50 feet of the earth's surface. Recently, however, Homberg (1962) and Colley (1962) did report some encoUl'ag- ing data using the gravity technique for void detection. This led to the present field study into the practical means of how this complex method can be simplified, and to a use-and-limitations appraisal of gravimetric techniques for speleologic research. Principles all(1 Correctiolls The fundamentals of gravimetry are based on the fact that natUl'al 01' artificial voids within the earth's sUl'face - which are filled with ail' 3 (negligible density) 01' water (density about 1 gmjcm ) - have a remark- able density contrast with the sUl'roun<ling rocks (density 2.0 to 1) 4609 Keswick Hoad, Baltimore 10, Maryland, U.S.A. -

The First Measurement of the Deflection of the Vertical in Longitude
Eur. Phys. J. H. DOI: 10.1140/epjh/e2014-40055-2 The first measurement of the deflection of the vertical in longitude The figure of the earth in the early 19th century Andreas Schrimpfa Philipps-Universit¨atMarburg, Fachbereich Physik, Renthof 5, D-35032 Marburg, Germany Abstract. During the summer of 1837 Christian Ludwig Gerling, a for- mer student of Carl Friedrich Gauß’s, organized the world wide first de- termination of the deflection of the vertical in longitude. From a mobile observatory at the Frauenberg near Marburg (Hesse) he measured the astronomical longitude difference between C.F. Gauß’s observatory at G¨ottingenand F.G.B. Nicolai's observatory at Mannheim within an er- ror of 000: 4. To achieve this precision he first used a series of light signals for synchronizing the observatory clocks and, second, he very carefully corrected for the varying reaction time of the observers. By comparing these astronomical results with the geodetic{determined longitude dif- ferences he had recently measured for the triangulation of Kurhessen, he was able to extract a combined value of the deflection of the vertical in longitude of G¨ottingenand Mannheim. His results closely agree with modern vertical deflection data. 1 Introduction The discussion about the figure of the earth and its determination was an open ques- tion for almost two thousand years, the sciences involved were geodesy, geography and astronomy. Without precise instruments the everyday experience suggested a flat, plane world, although ideas of a spherically shaped earth were known and ac- cepted even in the ancient world. Assuming that the easily observable daily motion of the stars is due to the rotation of the earth, the rotational axis can be used to define a celestial sphere; a coordinate system, where the stars' position is given by two angles. -

Reference Systems for Surveying and Mapping Lecture Notes
Delft University of Technology Reference Systems for Surveying and Mapping Lecture notes Hans van der Marel ii The front cover shows the NAP (Amsterdam Ordnance Datum) ”datum point” at the Stopera, Amsterdam (picture M.M.Minderhoud, Wikipedia/Michiel1972). H. van der Marel Lecture notes on Reference Systems for Surveying and Mapping: CTB3310 Surveying and Mapping CTB3425 Monitoring and Stability of Dikes and Embankments CIE4606 Geodesy and Remote Sensing CIE4614 Land Surveying and Civil Infrastructure February 2020 Publisher: Faculty of Civil Engineering and Geosciences Delft University of Technology P.O. Box 5048 Stevinweg 1 2628 CN Delft The Netherlands Copyright ©20142020 by H. van der Marel The content in these lecture notes, except for material credited to third parties, is licensed under a Creative Commons AttributionsNonCommercialSharedAlike 4.0 International License (CC BYNCSA). Third party material is shared under its own license and attribution. The text has been type set using the MikTex 2.9 implementation of LATEX. Graphs and diagrams were produced, if not mentioned otherwise, with Matlab and Inkscape. Preface This reader on reference systems for surveying and mapping has been initially compiled for the course Surveying and Mapping (CTB3310) in the 3rd year of the BScprogram for Civil Engineering. The reader is aimed at students at the end of their BSc program or at the start of their MSc program, and is used in several courses at Delft University of Technology. With the advent of the Global Positioning System (GPS) technology in mobile (smart) phones and other navigational devices almost anyone, anywhere on Earth, and at any time, can determine a three–dimensional position accurate to a few meters. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -

GPS and the Search for Axions
GPS and the Search for Axions A. Nicolaidis1 Theoretical Physics Department Aristotle University of Thessaloniki, Greece Abstract: GPS, an excellent tool for geodesy, may serve also particle physics. In the presence of Earth’s magnetic field, a GPS photon may be transformed into an axion. The proposed experimental setup involves the transmission of a GPS signal from a satellite to another satellite, both in low orbit around the Earth. To increase the accuracy of the experiment, we evaluate the influence of Earth’s gravitational field on the whole quantum phenomenon. There is a significant advantage in our proposal. While the geomagnetic field B is low, the magnetized length L is very large, resulting into a scale (BL)2 orders of magnitude higher than existing or proposed reaches. The transformation of the GPS photons into axion particles will result in a dimming of the photons and even to a “light shining through the Earth” phenomenon. 1 Email: [email protected] 1 Introduction Quantum Chromodynamics (QCD) describes the strong interactions among quarks and gluons and offers definite predictions at the high energy-perturbative domain. At low energies the non-linear nature of the theory introduces a non-trivial vacuum which violates the CP symmetry. The CP violating term is parameterized by θ and experimental bounds indicate that θ ≤ 10–10. The smallness of θ is known as the strong CP problem. An elegant solution has been offered by Peccei – Quinn [1]. A global U(1)PQ symmetry is introduced, the spontaneous breaking of which provides the cancellation of the θ – term. As a byproduct, we obtain the axion field, the Nambu-Goldstone boson of the broken U(1)PQ symmetry. -
Instruments and Gravity Processing Drift and Tides
Gravity 5 Objectives Instruments Gravity Gravity 5 Corrections Instruments and gravity processing Drift and Tides Latitude Free Air Chuck Connor, Laura Connor Atmosphere Simple Bouguer Summary Potential Fields Geophysics: Week 5 Further Reading EOMA Gravity 5 Objectives for Week 5 Gravity 5 Objectives Instruments • Gravity Learn about gravity Corrections instruments Drift and Tides • Learn about Latitude processing of gravity Free Air data Atmosphere • Make the Simple Bouguer corrections to Summary calculate a simple Further Bouguer anomaly Reading EOMA Gravity 5 The pendulum The first gravity data collected in the US were Gravity 5 obtained by G. Putman working for the Coast and Geodetic survey, around 1890. These gravity data comprised a set of 26 measurements made along a roughly E-W transect across the entire continental Objectives US. The survey took about 6 months to complete and was designed primarily to investigate isostatic Instruments compensation across the continent. Gravity Putnam used a pendulum gravity meter, based on the Corrections relation between gravity and the period of a pendulum: Drift and Tides 4π2l g = Latitude T 2 Free Air where: l is the length of the pendulum Atmosphere T is the pendulum period Simple Example Seems easy enough to obtain an absolute gravity Bouguer reading, but in practice pendulum gravity meters are Assuming the period of a pendulum is known to be 1 s Summary problematic. The length of the pendulum can change exactly, how well must the length of the pendulum be with temperature, the pendulum stand tends to sway, known to measure gravity to 10 mGal precision? Further air density effects the measurements, etc. -
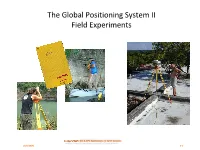
The Global Positioning System II Field Experiments
The Global Positioning System II Field Experiments Geo327G/386G: GIS & GPS Applications in Earth Sciences Jackson School of Geosciences, University of Texas at Austin 10/8/2020 5-1 Mexico DGPS Field Campaign Cenotes in Tamaulipas, MX, near Aldama Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-2 Are Cenote Water Levels Related? Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-3 DGPS Static Survey of Cenote Water Levels Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-4 Determining Orthometric Heights ❑Ortho. Height = H.A.E. – Geoid Height Height above MSL (Orthometric height) H.A.E. Geoid height Earth Surface = H.A.E. Geoid Ellipsoid Geoid Height Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-5 Determining Orthometric Heights ❑Ortho. Height = (H.A.E. – Geoid Height) Need: 1) Ellipsoid model – GRS80 – NAVD88 ❑reference stations: HARN (+ 2 cm), CORS (+ ~2 cm) 2) Geoid model – GEOID99 ( + 5 cm for US) Procedure: Base receiver at reference station, rover at point of interest a) measure HAE, apply DGS corrections b) subtract local Geoid Height Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-6 Sources of Error ❑Geoid error – model less well constrained in areas of few gravity measurement ❑NAVD88 error – benchmark stability, measurement errors ❑GPS errors – need precise ephemeri, tropospheric delay model, equipment (antennae should be same for base and rover) Geo327G/386G: GIS & GPS Applications in Earth Sciences 10/8/2020 Jackson School of Geosciences, University of Texas at Austin 5-7 Static Carrier-phase solutions obtained by: ❑Commercial post-processing software ❑e.g.