GEOMETRIC GEODESY Part 2.Tif
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Implications for the Adoption of Global Reference Geodesic System SIRGAS2000 on the Large Scale Cadastral Cartography in Brazil
Implications for the Adoption of Global Reference Geodesic System SIRGAS2000 on the Large Scale Cadastral Cartography in Brazil Vivian de Oliveira FERNANDES and Ruth Emilia NOGUEIRA, Brazil Key words: SIRGAS2000, SAD69, Global Geodesic System SUMMARY Since 2005 Brazil is going through a singular moment into Cartography. In January 2005, SIRGAS2000 began to be the geodetic official reference system for Geodesy and Cartography, with the concomitant use of SAD69. Since January 2015, only SIRGAS2000 will be official, and all cartographical products will have to be referenced into this Datum. The adoption of a geocentric reference system happens from the technological evolution that has favored an improvement of the Geodetic Reference System – SGR. Differently of a single alternative for the improvement of the SGR, the adoption of a new geocentric reference system is a basic necessity into the world-wide scenery to activities that depend on spatialized information. The technological advancements in the global positioning methods, specially in the satellite positioning systems. This change reaches more quickly the organs that need spatialized information in their infrastructure and planning activities, like town halls and services concessionaires like Telecommunications, Sanitation, Electric Energy among others, which need the real knowledge of the urban space: use and occupation of the soil, subsoil and air space, fiscal and housing technical register, generic plant of values, block plant, register reference plant, municipal master plan, among others that are derived from a cartographical basis of quality. Officially, were adopted these geodetic reference systems in Brazil: Córrego Alegre, Astro Datum Chuá, SAD69, and now SIRGAS2000. For legislation it is in transition for the SIRGAS2000. -
Geomatics Guidance Note 3
Geomatics Guidance Note 3 Contract area description Revision history Version Date Amendments 5.1 December 2014 Revised to improve clarity. Heading changed to ‘Geomatics’. 4 April 2006 References to EPSG updated. 3 April 2002 Revised to conform to ISO19111 terminology. 2 November 1997 1 November 1995 First issued. 1. Introduction Contract Areas and Licence Block Boundaries have often been inadequately described by both licensing authorities and licence operators. Overlaps of and unlicensed slivers between adjacent licences may then occur. This has caused problems between operators and between licence authorities and operators at both the acquisition and the development phases of projects. This Guidance Note sets out a procedure for describing boundaries which, if followed for new contract areas world-wide, will alleviate the problems. This Guidance Note is intended to be useful to three specific groups: 1. Exploration managers and lawyers in hydrocarbon exploration companies who negotiate for licence acreage but who may have limited geodetic awareness 2. Geomatics professionals in hydrocarbon exploration and development companies, for whom the guidelines may serve as a useful summary of accepted best practice 3. Licensing authorities. The guidance is intended to apply to both onshore and offshore areas. This Guidance Note does not attempt to cover every aspect of licence boundary definition. In the interests of producing a concise document that may be as easily understood by the layman as well as the specialist, definitions which are adequate for most licences have been covered. Complex licence boundaries especially those following river features need specialist advice from both the survey and the legal professions and are beyond the scope of this Guidance Note. -

Reference Systems for Surveying and Mapping Lecture Notes
Delft University of Technology Reference Systems for Surveying and Mapping Lecture notes Hans van der Marel ii The front cover shows the NAP (Amsterdam Ordnance Datum) ”datum point” at the Stopera, Amsterdam (picture M.M.Minderhoud, Wikipedia/Michiel1972). H. van der Marel Lecture notes on Reference Systems for Surveying and Mapping: CTB3310 Surveying and Mapping CTB3425 Monitoring and Stability of Dikes and Embankments CIE4606 Geodesy and Remote Sensing CIE4614 Land Surveying and Civil Infrastructure February 2020 Publisher: Faculty of Civil Engineering and Geosciences Delft University of Technology P.O. Box 5048 Stevinweg 1 2628 CN Delft The Netherlands Copyright ©20142020 by H. van der Marel The content in these lecture notes, except for material credited to third parties, is licensed under a Creative Commons AttributionsNonCommercialSharedAlike 4.0 International License (CC BYNCSA). Third party material is shared under its own license and attribution. The text has been type set using the MikTex 2.9 implementation of LATEX. Graphs and diagrams were produced, if not mentioned otherwise, with Matlab and Inkscape. Preface This reader on reference systems for surveying and mapping has been initially compiled for the course Surveying and Mapping (CTB3310) in the 3rd year of the BScprogram for Civil Engineering. The reader is aimed at students at the end of their BSc program or at the start of their MSc program, and is used in several courses at Delft University of Technology. With the advent of the Global Positioning System (GPS) technology in mobile (smart) phones and other navigational devices almost anyone, anywhere on Earth, and at any time, can determine a three–dimensional position accurate to a few meters. -

Geodetic Position Computations
GEODETIC POSITION COMPUTATIONS E. J. KRAKIWSKY D. B. THOMSON February 1974 TECHNICALLECTURE NOTES REPORT NO.NO. 21739 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. GEODETIC POSITION COMPUTATIONS E.J. Krakiwsky D.B. Thomson Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton. N .B. Canada E3B5A3 February 197 4 Latest Reprinting December 1995 PREFACE The purpose of these notes is to give the theory and use of some methods of computing the geodetic positions of points on a reference ellipsoid and on the terrain. Justification for the first three sections o{ these lecture notes, which are concerned with the classical problem of "cCDputation of geodetic positions on the surface of an ellipsoid" is not easy to come by. It can onl.y be stated that the attempt has been to produce a self contained package , cont8.i.ning the complete development of same representative methods that exist in the literature. The last section is an introduction to three dimensional computation methods , and is offered as an alternative to the classical approach. Several problems, and their respective solutions, are presented. The approach t~en herein is to perform complete derivations, thus stqing awrq f'rcm the practice of giving a list of for11111lae to use in the solution of' a problem. -
Anton Pannekoek: Ways of Viewing Science and Society
STUDIES IN THE HISTORY OF KNOWLEDGE Tai, Van der Steen & Van Dongen (eds) Dongen & Van Steen der Van Tai, Edited by Chaokang Tai, Bart van der Steen, and Jeroen van Dongen Anton Pannekoek: Ways of Viewing Science and Society Ways of Viewing ScienceWays and Society Anton Pannekoek: Anton Pannekoek: Ways of Viewing Science and Society Studies in the History of Knowledge This book series publishes leading volumes that study the history of knowledge in its cultural context. It aspires to offer accounts that cut across disciplinary and geographical boundaries, while being sensitive to how institutional circumstances and different scales of time shape the making of knowledge. Series Editors Klaas van Berkel, University of Groningen Jeroen van Dongen, University of Amsterdam Anton Pannekoek: Ways of Viewing Science and Society Edited by Chaokang Tai, Bart van der Steen, and Jeroen van Dongen Amsterdam University Press Cover illustration: (Background) Fisheye lens photo of the Zeiss Planetarium Projector of Artis Amsterdam Royal Zoo in action. (Foreground) Fisheye lens photo of a portrait of Anton Pannekoek displayed in the common room of the Anton Pannekoek Institute for Astronomy. Source: Jeronimo Voss Cover design: Coördesign, Leiden Lay-out: Crius Group, Hulshout isbn 978 94 6298 434 9 e-isbn 978 90 4853 500 2 (pdf) doi 10.5117/9789462984349 nur 686 Creative Commons License CC BY NC ND (http://creativecommons.org/licenses/by-nc-nd/3.0) The authors / Amsterdam University Press B.V., Amsterdam 2019 Some rights reserved. Without limiting the rights under copyright reserved above, any part of this book may be reproduced, stored in or introduced into a retrieval system, or transmitted, in any form or by any means (electronic, mechanical, photocopying, recording or otherwise). -
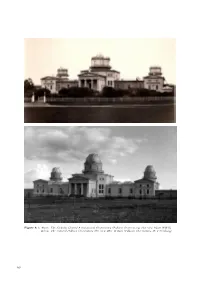
(Pulkovo Observatory) (The View Before WWII) Below: the Restored Pulkovo Observatory (The View After WWII) (Pulkovo Observatory, St
Figure 6.1: Above: The Nicholas Central Astronomical Observatory (Pulkovo Observatory) (the view before WWII) Below: The restored Pulkovo Observatory (the view after WWII) (Pulkovo Observatory, St. Petersburg) 60 6. The Pulkovo Observatory on the Centuries’ Borderline Viktor K. Abalakin (St. Petersburg, Russia) in Astronomy” presented in 1866 to the Saint-Petersburg Academy of Sciences. The wide-scale astrophysical studies were performed at Pulkovo Observatory around 1900 during the directorship of Theodore Bredikhin, Oscar Backlund and Aristarchos Be- lopolsky. The Nicholas Central Astronomical Observatory at Pulkovo, now the Central (Pulkovo) Astronomical Observatory of the Russian Academy of Sciences, had been co-founded by Friedrich Georg Wilhelm Struve (1793–1864) [Fig. 6.2] together with the All-Russian Emperor Nicholas the First [Fig. 6.3] and inaugurated in 1839. The Observatory had been erected on the Pulkovo Heights (the Pulkovo Hill) near Saint-Petersburg in ac- cordance with the design of Alexander Pavlovich Brül- low, [Fig. 6.3] the well-known architect of the Russian Empire. [Fig. 6.4: Plan of the Observatory] From the very beginning, the traditional field of re- search work of the Observatory was Astrometry – i. e. determination of precise coordinates of stars from the observations and derivation of absolute star catalogues for the epochs of 1845.0, 1865.0 and 1885.0 (the later catalogues were derived for epochs of 1905.0 and 1930.0); they contained positions of 374 through 558 bright, so- called fundamental, stars. It is due to these extraordi- Figure 6.2: Friedrich Georg Wilhelm (Vasily Yakovlevich) narily precise Pulkovo catalogues that Benjamin Gould Struve (1793–1864), director 1834 to 1862 had called the Pulkovo Observatory the “astronomical (Courtesy of Pulkovo Observatory, St. -

Observations of the Satellites of the Major Planets at Pulkovo Observatory: History and Present N
Astronomy and Astrophysics in the Gaia sky Proceedings IAU Symposium No. 330, 2017 A. Recio-Blanco, P. de Laverny, A.G.A. Brown c International Astronomical Union 2018 & T. Prusti, eds. doi:10.1017/S1743921317005737 Observations of the satellites of the major planets at Pulkovo Observatory: history and present N. A. Shakht, A. V. Devyatkin, D. L. Gorshanov and M. S. Chubey Central (Pulkovo) Observatory RAS, St- Petersburg 196140, Russia email: [email protected] Abstract. In connection with long on-orbit European space satellite Gaia and the opportunity that now provides ESA, to use the results of observations of the space telescope, we would like to present some results of our long-term observations of the major planets satellites at Pulkovo Observatory. We hope to translate into reality these opportunities, namely the use of new observations and new ephemeris and a practical possibility of a new reduction for modern and old observations. The essential facilities can appear in the space, we give the shortest presentation of space project Orbital Stellar Stereoscopic Observatory. Keywords. natural satellites of great planets, observations, space project OStSO The astrometric positional observations of the major planets and their satellites started almost since the foundation of Pulkovo observatory. The first photographic observations made with Pulkovo Normal Astrograph (PNA) since 1894 yr and continued during one hundred years. Now we have about 6500 plates with the bodies of the Solar System from of total quantity 48 000 plates collected in Pulkovo glass library. The most positions and the list of publications took place in our database www.puldb.ru which is updated. -

Coordinate Systems in Geodesy
COORDINATE SYSTEMS IN GEODESY E. J. KRAKIWSKY D. E. WELLS May 1971 TECHNICALLECTURE NOTES REPORT NO.NO. 21716 COORDINATE SYSTElVIS IN GEODESY E.J. Krakiwsky D.E. \Vells Department of Geodesy and Geomatics Engineering University of New Brunswick P.O. Box 4400 Fredericton, N .B. Canada E3B 5A3 May 1971 Latest Reprinting January 1998 PREFACE In order to make our extensive series of lecture notes more readily available, we have scanned the old master copies and produced electronic versions in Portable Document Format. The quality of the images varies depending on the quality of the originals. The images have not been converted to searchable text. TABLE OF CONTENTS page LIST OF ILLUSTRATIONS iv LIST OF TABLES . vi l. INTRODUCTION l 1.1 Poles~ Planes and -~es 4 1.2 Universal and Sidereal Time 6 1.3 Coordinate Systems in Geodesy . 7 2. TERRESTRIAL COORDINATE SYSTEMS 9 2.1 Terrestrial Geocentric Systems • . 9 2.1.1 Polar Motion and Irregular Rotation of the Earth • . • • . • • • • . 10 2.1.2 Average and Instantaneous Terrestrial Systems • 12 2.1. 3 Geodetic Systems • • • • • • • • • • . 1 17 2.2 Relationship between Cartesian and Curvilinear Coordinates • • • • • • • . • • 19 2.2.1 Cartesian and Curvilinear Coordinates of a Point on the Reference Ellipsoid • • • • • 19 2.2.2 The Position Vector in Terms of the Geodetic Latitude • • • • • • • • • • • • • • • • • • • 22 2.2.3 Th~ Position Vector in Terms of the Geocentric and Reduced Latitudes . • • • • • • • • • • • 27 2.2.4 Relationships between Geodetic, Geocentric and Reduced Latitudes • . • • • • • • • • • • 28 2.2.5 The Position Vector of a Point Above the Reference Ellipsoid . • • . • • • • • • . .• 28 2.2.6 Transformation from Average Terrestrial Cartesian to Geodetic Coordinates • 31 2.3 Geodetic Datums 33 2.3.1 Datum Position Parameters . -

Vertical Component
ARTIFICIAL SATELLITES, Vol. 46, No. 3 – 2011 DOI: 10.2478/v10018-012-0001-2 THE PROBLEM OF COMPATIBILITY AND INTEROPERABILITY OF SATELLITE NAVIGATION SYSTEMS IN COMPUTATION OF USER’S POSITION Jacek Januszewski Gdynia Maritime University, Navigation Department al. JanaPawla II 3, 81–345 Gdynia, Poland e–mail:[email protected] ABSTRACT. Actually (June 2011) more than 60 operational GPS and GLONASS (Satellite Navigation Systems – SNS), EGNOS, MSAS and WAAS (Satellite Based Augmentation Systems – SBAS) satellites are in orbits transmitting a variety of signals on multiple frequencies. All these satellite signals and different services designed for the users must be compatible and open signals and services should also be interoperable to the maximum extent possible. Interoperability definition addresses signal, system time and geodetic reference frame considerations. The part of compatibility and interoperability of all these systems and additionally several systems under construction as Compass, Galileo, GAGAN, SDCM or QZSS in computation user’s position is presented in this paper. Three parameters – signal in space, system time and coordinate reference frame were taken into account in particular. Keywords: Satellite Navigation System (SNS), Saellite Based Augmentation System (SBAS), compability, interoperability, coordinate reference frame, time reference, signal in space INTRODUCTION Information about user’s position can be obtained from specialized electronic position-fixing systems, in particular, Satellite Navigation Systems (SNS) as GPS and GLONASS, and Satellite Based Augmentation Systems (SBAS) as EGNOS, WAAS and MSAS. All these systems are known also as GNSS (Global Navigation Satellite System). Actually (June 2011) more than 60 operational GPS, GLONASS, EGNOS, MSAS and WAAS satellites are in orbits transmitting a variety of signals on multiple frequencies. -

The History of Geodesy Told Through Maps
The History of Geodesy Told through Maps Prof. Dr. Rahmi Nurhan Çelik & Prof. Dr. Erol KÖKTÜRK 16 th May 2015 Sofia Missionaries in 5000 years With all due respect... 3rd FIG Young Surveyors European Meeting 1 SUMMARIZED CHRONOLOGY 3000 BC : While settling, people were needed who understand geometries for building villages and dividing lands into parts. It is known that Egyptian, Assyrian, Babylonian were realized such surveying techniques. 1700 BC : After floating of Nile river, land surveying were realized to set back to lost fields’ boundaries. (32 cm wide and 5.36 m long first text book “Papyrus Rhind” explain the geometric shapes like circle, triangle, trapezoids, etc. 550+ BC : Thereafter Greeks took important role in surveying. Names in that period are well known by almost everybody in the world. Pythagoras (570–495 BC), Plato (428– 348 BC), Aristotle (384-322 BC), Eratosthenes (275–194 BC), Ptolemy (83–161 BC) 500 BC : Pythagoras thought and proposed that earth is not like a disk, it is round as a sphere 450 BC : Herodotus (484-425 BC), make a World map 350 BC : Aristotle prove Pythagoras’s thesis. 230 BC : Eratosthenes, made a survey in Egypt using sun’s angle of elevation in Alexandria and Syene (now Aswan) in order to calculate Earth circumferences. As a result of that survey he calculated the Earth circumferences about 46.000 km Moreover he also make the map of known World, c. 194 BC. 3rd FIG Young Surveyors European Meeting 2 150 : Ptolemy (AD 90-168) argued that the earth was the center of the universe. -

Sistemas De Coordendas Celestes
Prof. DR. Carlos Aurélio Nadal - Sistemas de Referência e Tempo em Geodésia – Aula 05 1.3 Posicionamento na Terra Elipsóidica Na cartografia utiliza-se como modelo matemático para a forma da Terra o elipsóide de revolução Posicionamento na Terra Elipsóidica Prof. DR. Carlos Aurélio Nadal - Sistemas de Referência e Tempo em Geodésia – Aula 05 O SISTEMA GPS EFETUA MEDIÇÕES GEODÉSICAS Posicionamento na Terra Elipsóidica Prof. DR. Carlos Aurélio Nadal - Sistemas de Referência e Tempo em Geodésia – Aula 05 Qual é a forma da Terra? Qual é a representação matemática da superfície de referência para a cartografia? A superfície topográfica da Terra apresenta uma forma muito irregular, com elevações e depressões. Posicionamento na Terra Elipsóidica Prof. DR. Carlos Aurélio Nadal - Sistemas de Referência e Tempo em Geodésia – Aula 05 Modelos utilizados para a Terra esfera elipsóide geóide PosicionamentoTerra na Terra Elipsóidica Prof. DR. Carlos Aurélio Nadal - Sistemas de Referência e Tempo em Geodésia – Aula 05 O GEÓIDE Geóide: superfície cuja normal coincide com a vertical do lugar V V´ Superfície equipotencial O geóide é uma superfície equipotencial coincidente com o nível médio dos mares g considerados em repouso. Posicionamento na Terra Elipsóidica Prof. DR. Carlos Aurélio Nadal - Sistemas de Referência e Tempo em Geodésia – Aula 05 Geóide tem uma superfície irregular, determinável ponto a ponto. Causas: crosta terrestre heterogenea. Isostasia |f| = k m1 m2 2 d12 Posicionamento na Terra Elipsóidica Prof. DR. Carlos Aurélio Nadal - Sistemas de Referência e Tempo em Geodésia – Aula 05 REPRESENTAÇÃO GEODÉSICA DA TERRA Elipsóide de revolução: elipse girando em torno do seu eixo menor (2b) Círculo máximo a= raio maior ou semi-eixo maior b= raio menor ou semi-eixo menor Prof .M A Zanetti Posicionamento na Terra Elipsóidica Prof. -

Advanced Positioning for Offshore Norway
Advanced Positioning for Offshore Norway Thomas Alexander Sahl Petroleum Geoscience and Engineering Submission date: June 2014 Supervisor: Sigbjørn Sangesland, IPT Co-supervisor: Bjørn Brechan, IPT Norwegian University of Science and Technology Department of Petroleum Engineering and Applied Geophysics Summary When most people hear the word coordinates, they think of latitude and longitude, variables that describe a location on a spherical Earth. Unfortunately, the reality of the situation is far more complex. The Earth is most accurately represented by an ellipsoid, the coordinates are three-dimensional, and can be found in various forms. The coordinates are also ambiguous. Without a proper reference system, a geodetic datum, they have little meaning. This field is what is known as "Geodesy", a science of exactly describing a position on the surface of the Earth. This Thesis aims to build the foundation required for the position part of a drilling software. This is accomplished by explaining, in detail, the field of geodesy and map projections, as well as their associated formulae. Special considerations is taken for the area offshore Norway. Once the guidelines for transformation and conversion have been established, the formulae are implemented in MATLAB. All implemented functions are then verified, for every conceivable method of opera- tion. After which, both the limitation and accuracy of the various functions are discussed. More specifically, the iterative steps required for the computation of geographic coordinates, the difference between the North Sea Formulae and the Bursa-Wolf transformation, and the accuracy of Thomas-UTM series for UTM projections. The conclusion is that the recommended guidelines have been established and implemented.