The Next Generation Control System of Ganil
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Openvms Record Management Services Reference Manual
OpenVMS Record Management Services Reference Manual Order Number: AA-PV6RD-TK April 2001 This reference manual contains general information intended for use in any OpenVMS programming language, as well as specific information on writing programs that use OpenVMS Record Management Services (OpenVMS RMS). Revision/Update Information: This manual supersedes the OpenVMS Record Management Services Reference Manual, OpenVMS Alpha Version 7.2 and OpenVMS VAX Version 7.2 Software Version: OpenVMS Alpha Version 7.3 OpenVMS VAX Version 7.3 Compaq Computer Corporation Houston, Texas © 2001 Compaq Computer Corporation Compaq, AlphaServer, VAX, VMS, the Compaq logo Registered in U.S. Patent and Trademark Office. Alpha, PATHWORKS, DECnet, DEC, and OpenVMS are trademarks of Compaq Information Technologies Group, L.P. in the United States and other countries. UNIX and X/Open are trademarks of The Open Group in the United States and other countries. All other product names mentioned herein may be the trademarks of their respective companies. Confidential computer software. Valid license from Compaq required for possession, use, or copying. Consistent with FAR 12.211 and 12.212, Commercial Computer Software, Computer Software Documentation, and Technical Data for Commercial Items are licensed to the U.S. Government under vendor’s standard commercial license. Compaq shall not be liable for technical or editorial errors or omissions contained herein. The information in this document is provided "as is" without warranty of any kind and is subject to change without notice. The warranties for Compaq products are set forth in the express limited warranty statements accompanying such products. Nothing herein should be construed as constituting an additional warranty. -

HP C Run-Time Library Reference Manual for Openvms Systems
HP C Run-Time Library Reference Manual for OpenVMS Systems Order Number: BA554-90014 June 2010 This manual describes the functions and macros in the HP C Run-Time Library for OpenVMS systems. Revision/Update Information: This manual supersedes the HP C Run-Time Library Reference Manual for OpenVMS Systems, Version 8.3 Software Version: OpenVMS Version 8.4 for Integrity servers OpenVMS Alpha Version 8.4 Hewlett-Packard Company Palo Alto, California © Copyright 2010 Hewlett-Packard Development Company, L.P. Confidential computer software. Valid license from HP required for possession, use or copying. Consistent with FAR 12.211 and 12.212, Commercial Computer Software, Computer Software Documentation, and Technical Data for Commercial Items are licensed to the U.S. Government under vendor’s standard commercial license. The information contained herein is subject to change without notice. The only warranties for HP products and services are set forth in the express warranty statements accompanying such products and services. Nothing herein should be construed as constituting an additional warranty. HP shall not be liable for technical or editorial errors or omissions contained herein. UNIX is a registered trademark of The Open Group. X/Open is a registered trademark of X/Open Company Ltd. in the UK and other countries. Intel and Itanium are trademarks or registered trademarks of Intel Corporation or its subsidiaries in the United States and other countries. Microsoft and Windows are US registered trademarks of Microsoft Corporation. Printed in the US ZK5763 The HP OpenVMS documentation set is available on CD-ROM. This document was prepared using DECdocument, Version 3.3-1b. -
DEC Ada Developing Ada Programs on Openvms Systems
DEC Ada Developing Ada Programs on OpenVMS Systems Order Number: AA–PWGYA–TK January 1993 This manual describes how to compile, link, and execute DEC Ada programs. It describes the use of the DEC Ada compiler and DEC Ada program library manager. Revision/Update Information: This revised manual supersedes Developing Ada Programs on VMS Systems (Order No. AA–EF86B–TE). Operating System and Version: VMS Version 5.4 or higher OpenVMS AXP Version 1.0 or higher Software Version: DEC Ada Version 3.0 Digital Equipment Corporation Maynard, Massachusetts February 1985 Revised, May 1989 Revised, January 1993 The information in this document is subject to change without notice and should not be construed as a commitment by Digital Equipment Corporation. Digital Equipment Corporation assumes no responsibility for any errors that may appear in this document. The software described in this document is furnished under a license and may be used or copied only in accordance with the terms of such license. No responsibility is assumed for the use or reliability of software on equipment that is not supplied by Digital Equipment Corporation or its affiliated companies. Restricted Rights: Use, duplication, or disclosure by the U.S. Government is subject to restrictions as set forth in subparagraph (c)(1)(ii) of the Rights in Technical Data and Computer Software clause at DFARS 252.227-7013. © Digital Equipment Corporation 1985, 1989, 1993. All Rights Reserved. The postpaid Reader’s Comments forms at the end of this document request your critical evaluation to assist in preparing future documentation. The following are trademarks of Digital Equipment Corporation: AXP, DEC, DEC Ada, DECnet, DECset VMS, Digital, OpenVMS, ULTRIX, VAX, VAX Ada, VAX Pascal, VAXcluster, VAXELN, VAXset, VAXStation, VMS, VAX–11/780, XD Ada, and the DIGITAL logo. -

The Computer History Simulation Project
The Computer History Simulation Project The Computer History Simulation Project The Computer History Simulation Project is a loose Internet-based collective of people interested in restoring historically significant computer hardware and software systems by simulation. The goal of the project is to create highly portable system simulators and to publish them as freeware on the Internet, with freely available copies of significant or representative software. Simulators SIMH is a highly portable, multi-system simulator. ● Download the latest sources for SIMH (V3.5-1 updated 15-Oct-2005 - see change log). ● Download a zip file containing Windows executables for all the SIMH simulators. The VAX and PDP-11 are compiled without Ethernet support. Versions with Ethernet support are available here. If you download the executables, you should download the source archive as well, as it contains the documentation and other supporting files. ● If your host system is Alpha/VMS, and you want Ethernet support, you need to download the VMS Pcap library and execlet here. SIMH implements simulators for: ● Data General Nova, Eclipse ● Digital Equipment Corporation PDP-1, PDP-4, PDP-7, PDP-8, PDP-9, PDP-10, PDP-11, PDP- 15, VAX ● GRI Corporation GRI-909 ● IBM 1401, 1620, 1130, System 3 ● Interdata (Perkin-Elmer) 16b and 32b systems ● Hewlett-Packard 2116, 2100, 21MX ● Honeywell H316/H516 ● MITS Altair 8800, with both 8080 and Z80 ● Royal-Mcbee LGP-30, LGP-21 ● Scientific Data Systems SDS 940 Also available is a collection of tools for manipulating simulator file formats and for cross- assembling code for the PDP-1, PDP-7, PDP-8, and PDP-11. -

CM50S Specification and Technical Data
L CM50S Specification and Technical Data CM03-541 Release 5.0 6/95 detergant coffee chocolate CM03-541 Page 2 CM50S Specification and Release 5.0 Technical Data Introduction within an overall plant-wide management information system. An Ethernet network is the CM50S—Release 5.0 consists of communications medium, if the One CM50S on a OpenVMS a Honeywell software package Plant Network Module is used to system can support up to four that, along with associated interface the LCN to a Digital connections to Plant Network hardware, enables a Digital system. Modules and/or Computer Equipment Corporation Gateways. The Plant Network Using the Plant Network Module, OpenVMS system to function as Modules and Computer Gateways the CM50S package supports all a Computing Module of the X may reside as nodes on the same Digital systems bus structures as TDC 3000 Local Control or different LCNs. Figure 1 well as busless Digital systems, Network as shown in Figure 1. shows two CM50S packages such as VAXstation and Fault connected to the same LCN, with Tolerant VAX systems and AXP Accordingly, the Digital system each using one type of physical systems. Computing Module can connection. exchange information with all The Plant Network Module other nodes on the LCN, and can Note, CM50S Release 5.0 fully interface is through an Ethernet serve as a data-gathering node supports existing Computer cable. The Digital system thus Gateway installations. The Plant becomes a module on the LCN Network Module, however, with the ability to communicate OpenVMS, AXP and VAX are replaces the Computer Gateway with other LCN modules and with trademarks of Digital Equipment for all new installations. -

Rtvax 300 Hardware User's Guide
rtVAX 300 Hardware User’s Guide Order Number: EK–382AB–UG–002 This manual contains technical and physical specifications of the rtVAX 300 processor and information necessary for configuring it into host and target configurations—that is, information on the following interfaces: memory system, console and boot ROM, network interconnect, and I/O device. Revision/Update Information: This manual supersedes the rtVAX 300 Hardware User’s Guide, EK–382AA–UG– 001. Software Revision: VAXELN Version 4.2 Hardware Revision: rtVAX 300 Version C1 Firmware Revision: Version 1.1 Digital Equipment Corporation Maynard, Massachusetts First Printing, May 1990 Revised, April 1991 The information in this document is subject to change without notice and should not be construed as a commitment by Digital Equipment Corporation. Digital Equipment Corporation assumes no responsibility for any errors that may appear in this document. Any software described in this document is furnished under a license and may be used or copied only in accordance with the terms of such license. No responsibility is assumed for the use or reliability of software or equipment that is not supplied by Digital Equipment Corporation or its affiliated companies. Restricted Rights: Use, duplication, or disclosure by the U.S. Government is subject to restrictions as set forth in subparagraph (c)(1)(ii) of the Rights in Technical Data and Computer Software clause at DFARS 252.227–7013. © Digital Equipment Corporation 1990, 1991. All rights reserved. Printed in U.S.A. The following are trademarks of Digital Equipment Corporation: DDCMP, DEC, DECnet, DECnet–VAX, DECwindows, DELUA, DEQNA, DEUNA, DSSI, IVAX, MicroVAX, PDP, Q22-bus, RQDX, RQDX, rtVAX 300, ThinWire, VAX, VAXcluster, VAX DOCUMENT, VAXELN, VMS, and the DIGITAL Logo. -

Digital Technical Journal, Number 2, March 1986: Microvax II System
o MicroVAX II System Digital Technical Journal ofDigital Equipment Corporation Number 2 March 1986 Editorial Staff Editor - Richard W. Beane Production Staff Production Editor- M. Terri Autieri Designer- Charlotte Bell Typesetting Programmer -James K. Scarsdale Advisory Board Samuel H. Fuller, Chairman Robert M. Glorioso John W. McCredie John F. Mucci Mahendra R. Patel Grant F. Saviers William D. Strecker Maurice V. Wilkes The Digital Technical journal is published by Digital Equipment Corporation, 77 Reed Road, Hudson, Massachusetts 01749. Comments on the content of any paper are welcomed. Write to the editor at Mail Stop HL02-3/KI1 at the published-by address. Comments can also be sent on the ENET to RDVAX::BEANE or on the ARPANET to BEANE%RDVAX.DEC@DECWRL. Copyright © 1986 Digital Equipment Corporation. Copying without fee is permitted provided that such copies are made for use in educational institutions by faculty members and are not distributed for commer cial advantage. Abstracting with credit of Digital Equipment Corporation's authorship is permitted. Requests for other copies for a fee may be made to the Digital Press of Digital Equipment Corporation. All rights reserved. The information in this journal is subject to change without notice and should not be construed as a com mitment by Digital Equipment Corporation. Digital Equipment Corporation assumes no responsibility for any errors that may appear in this document. ISBN 932376-89-4 Documentation Number EY-3474E-DP The following are trademarks of Digital Equipment Corporation: CompacTape, DEC, the Digital logo, MicroVAX, MicroVAX I, MicroVAX II, MicroVMS, PDP-7, PDP-I I, Q-BUS, RSTS, TK50, ULTRIX, ULTRIX-32, UN113US, VAX, VAX-ll/730, VAX-ll/750, VAX-ll/780, VAX 8600, VAX 8200, VAXELN, VAXstation, VMS, VT. -

An Acquisition System Based on a Network of Microvax's Running the Realtime Dec Vaxeln Operating System
1602 IEEE TRANSACTIONS ON NUCLEAR SCIENCE, VOL. 36, NO. 5, OCTOBER 1989 AN ACQUISITION SYSTEM BASED ON A NETWORK OF MICROVAX'S RUNNING THE REALTIME DEC VAXELN OPERATING SYSTEM LD'Antone, G.Mandrioli, P.Matteuzzi, G.Sanzani WFN Sez di Bologna and Physics Department, University of Bologna, Via Irnerio 46.40126 Bologna, Italy C.Bloise, A.F.Grillo, A.Marini, F.Ronga INFN Laboraton' Nazionali di Frascati, C.P.13,00044 Frascati, Italy A .Baldhi INFN Sez di Pisa, Via Livornese, San Piero a Grado, 56100 Pisa, Italy G. Manc arella, O.Palamara, A. S urdo INFN Sez di Lecce and Physics Deparhnent, University of Lecce, Via per Arnesano, 73100 Lecce, Italy E.Lamanna, S.Petrera INFN Sez di Roma and Physics Department, Universiry of Roma, Piazzale A.Moro 2,00185 Roma, Italy Abstract We describe an acquisition system based on a network Digital readout (streamer tube subsystem): loo,o0o (Ethemet/DECNET) of MicroVAX's running in the VAXELN Wave form digitizers (scintillator subsystem): 580 environment. VAXELN is a Digital Equipment software Wave form digitizers (streamer tube subsystem): 720 product for the development of dedicated, real time systems for ADC's (scintillator subsystem): 1,160 VAX processors. TDC's (scintillator subsystem): 580 A central VAX running under the VAXNMS operating system is used as file server and as an interface of the acquisition system with respect to the user's world. INTRODUCTION The MACRO detector [ 11 has been designed to search for rare phenomena in the cosmic radiation (GUTmonopoles or supermassive charged penetrating particles), to perform a survey of cosmic point sources of high energy gammas and neutrinos, to study the penetrating cosmic ray muons, and to be sensitive to neutrino bursts originated by gravitational stellar collapses in our Galaxy. -
Alpha, VAX and PDP-11 Virtualization
Alpha, VAX and PDP-11 Virtualization An overview of CHARON products OpenVMS Tech. Update, Bad Homburg, Sep 17-18, 2009 Dogan Baser / Sep 2009 Copyright 2001-2009 Stromasys SA 01-20-017-05 p 1 Contents • Stromasys SA • Legacy DEC systems • Hardware virtualization • CHARON products overview • Benefits Copyright 2001-2009 Stromasys SA 01-20-017-05 p 2 Stromasys SA • Former European application migration department of Digital Equipment Corporation (DEC) • Management buy-out in 1998 Æ Software Resources International SRI • Renamed to Stromasys SA in 2008 • Headquarters in Geneva, Switzerland • Focus on preserving software investments via – Hardware emulators (VAX, PDP-11, Alpha), and – Application source code migrations • Sales and support channel worldwide Copyright 2001-2009 Stromasys SA 01-20-017-05 p 3 IT applications are socio-technical systems Copyright 2001-2009 Stromasys SA 01-20-017-05 p 4 DEC computers Programmable Data Processor PDP (PDP-11: 16 bit) Virtual Address eXtension VAX (32 bit) Alpha Extended VAX (64 bit) Copyright 2001-2009 Stromasys SA 01-20-017-05 p 5 PDP-11 • Sold by DEC between 1970 and 1997 • First real time process control computer in the industry sold in large quantities • Several bus structures: UNIbus, Qbus, Massbus • Cloned several times in the Eastern Block countries – SM-4, SM-1420, SM-1600, Elektronika BK-0010, DVK, UKNC (Soviet Union) – SM-4, SM-1420, IZOT-1016 (Bulgaria) – SM-1420 (East Germany) –Mera(Poland) – SM-4 (Hungary) – I-102 (Romenia) • Several operating systems by DEC and others: – DOS/BATCH, -
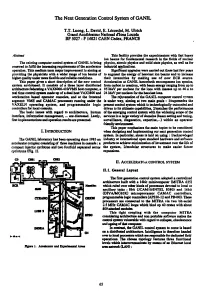
The Next Generation Control System of GANIL
The Next Generation Control System of GANIL T.T. Luang, L. David, E. Lecorche, M. Ulrich Grand Accelerateur National dloni Lourda BP 5027 - F14021 CAEN Cedex, FRANCE Abstact This facility provides the experimenters with fast heavy ion beams for fundamental research in the fields of nuclear The existing computer control system of GANIL is being physics, atomic physics and solid state physics, as well as for renewed to fulfil the increasing requirements of the accelerator industrial applications. operation. This medium term major improvement is aiming at Significant upgrades were carried out these last few years providing the physicists with a wider range of ion beams of to augment the energy of heaviest ion beams and to increase higher quality under nun flexible and reliable conditions. their intensities by making use of new ECR source. This paper gives a snort description of the new control Acceleration at GANIL henceforth encompasses ion species, system envisioned. It consists of a three layer distributed from carbon to uranium, with beam energy ranging from up to architecture federating a VAX6000-410/VMS host computer, a 95 MeV per nucleon for the Ions with masses up to 40 u to resjtinw control system made up ofa dual host VAX3800 and 24 MeV per nucleon for the heaviest ions, workstation based operator consoles, and at the frontend The rejuvenation of the GAW1L computer control system segment: VME and CAMAC processors running under the is under way, aiming at two main goals : l/supersedes the VAXELN operating system, and programmable logic present control system which is technologically outmoded and controllers for local controls. -

Oral History of David Cutler
Oral History of David Cutler Interviewed by: Grant Saviers Recorded: February 25, 2016 Medina, WA CHM Reference number: X7733.2016 © 2016 Computer History Museum Oral History of David Cutler Grant Saviers: I'm Grant Saviers, Trustee at the Computer History Museum, here with Dave Cutler in his living room in Bellevue, on a beautiful Seattle day. Nice weather, for a change. I’m here to discuss with Dave his long career in the computer industry. And so we'll begin. So we were talking about your entry into computers. But let's roll back a bit into early childhood and living in Michigan and being near the Oldsmobile factory in Lansing. So tell us a little bit about your early days and high school. David Cutler: Well, I grew up in Dewitt, Michigan, which is about ten miles north of Lansing, where Oldsmobile was at. I went to Dewitt High School. I was primarily an athlete, not a student, although I had pretty good grades at Dewitt. I was a 16-letter athlete. I played football, basketball, baseball and I ran track. And I'm a Michigan State fan. Michigan State was right there in East Lansing, so I grew up close to East Lansing and Michigan State. Early on, I was very interested in model airplanes, and built a lot of model airplanes and wanted to be a pilot when I grew up. But somehow that just went by the way. And later on, I discovered I had motion sickness problems, anyway, so that wasn't going to make it. -

Annual Technical Report for Ada Embedded Systems Testbed Project
Technical Report CMU/SEI-87-TR-031 ESD-TR-87-194 Annual Technical Report for Ada Embedded Systems Testbed Project Nelson H. Weiderman Neal Altman Mark Borger Patrick Donohoe William E. Hefley Mark H. Klein Stefan F. Landherr Hans Mumm John A. Slusarz December 1987 Technical Report CMU/SEI-87-TR-31 ESD-TR-87-194 December 1987 Annual Technical Report for Ada Embedded Systems Testbed Project Nelson H. Weiderman Neal Altman Mark Borger Patrick Donohoe William E. Hefley Mark Klein Stefan F. Landherr Hans Mumm John A. Slusarz Ada Embedded Systems Testbed Project Approved for public release. Distribution unlimited. Software Engineering Institute Carnegie Mellon University Pittsburgh, Pennsylvania 15213 This technical report was prepared for the SEI Joint Program Office ESD/XRS Hanscom AFB, MA 01731 The ideas and findings in this report should not be construed as an official DoD position. It is published in the interest of scientific and technical information exchange. Review and Approval This report has been reviewed and is approved for publication. FOR THE COMMANDER Karl H. Shingler SIGNATURE ON FILE SEI Joint Program Office This work is sponsored by the U.S. Department of Defense. Copyright 1987 by the Software Engineering Institute This document is available through the Defense Technical Information Center. DTIC provides access to and transfer of scientific and technical information for DoD personnel, DoD contractors and potential contractors, and other U.S. Government agency personnel and their contractors. To obtain a copy, please contact DTIC directly: Defense Technical Information Center, Attn: FDRA, Cameron Station, Alexandria, VA 22304-6145. Copies of this document are also available through the National Technical Information Services.