Studying the Construction of Floor Mosaics in the Roman Villa of Pisões (Portugal) Using Noninvasive Methods: High-Resolution 3D GPR and Photogrammetry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Villas and Agriculture in Republican Italy
CHAPTER 20 Villas and Agriculture in Republican Italy Jeffrey A. Becker 1 Introduction The iconicity of the “Roman villa” affords it a rare status in that its appeal easily cuts across the boundaries of multiple disciplines. This is perhaps because the villa has always stimulated our imagination about the ancient world and cultivated a longing for that realm of convivial, pastoral bliss that the villa conjures up for us. Just as Seneca contem- plated Roman virtues in the context of the villa of Scipio Africanus (Sen. Ep. 86), mod- ern (and post-modern) thinkers continue to privilege the villa both as place and space, often using its realm as one in which to generate reconstructions and visions of the ancient past. In the nineteenth century the Roman villa appealed to the Romantics and the exploration of Vesuvian sites, in particular, fueled a growing scholarly interest in the architecture and aesthetics of the Roman villa (most recently, Mattusch, 2008). Often guided by ancient texts, villas were divided into typological groups, as were the interior appointments from wall paintings to floor mosaics. Villas seemed to be a homogeneous type, representative of a “Roman” cultural norm. The fascination with villa life began in antiquity, not only with the likes of Seneca but also poets and scholars such as Virgil and Varro. In spite of the iconic status of the villa from antiquity to modernity, a good deal of uncertainty remains with respect to the archaeology of Roman villas of the latter half of the first millennium. The scholarly approach to the Roman villa finds itself at something of a crossroads, particularly with respect to the villas of the Republican period in Italy. -

Locus Bonus : the Relationship of the Roman Villa to Its Environment in the Vicinity of Rome
LOCUS BONUS THE RELATIONSHIP OF THE ROMAN VILLA TO ITS ENVIRONMENT IN THE VICINITY OF ROME EEVA-MARIA VIITANEN ACADEMIC DISSERTATION TO BE PUBLICLY DISCUSSED, BY DUE PERMISSION OF THE FACULTY OF ARTS AT THE UNIVERSITY OF HELSINKI IN AUDITORIUM XV, ON THE 2ND OF OCTOBER, 2010 AT 10 O’CLOCK HELSINKI 2010 © Eeva-Maria Viitanen ISBN 978-952-92-7923-4 (nid.) ISBN 978-952-10-6450-0 (PDF) PDF version available at: http://ethesis.helsinki.fi/ Helsinki University Print Helsinki, 2010 Cover: photo by Eeva-Maria Viitanen, illustration Jaana Mellanen CONTENTS ABSTRACT iii ACKNOWLEDGEMENTS v LIST OF FIGURES, TABLES AND PLATES vii 1 STUDYING THE ROMAN VILLA AND ITS ENVIRONMENT 1 1.1 INTRODUCTION 1 1.2 DEFINING THE VILLA 3 1.3 THE ROMAN VILLA IN CLASSICAL STUDIES 6 Origin and Development of the Villa 6 Villa Typologies 8 Role of the Villa in the Historical Studies 10 1.4 THEORETICAL AND METHODOLOGICAL CONSIDERATIONS 11 2 ARCHAEOLOGICAL MATERIAL AND WRITTEN SOURCES 15 2.1 RESEARCH HISTORY OF THE ROMAN CAMPAGNA 15 2.2 FIELDWORK METHODOLOGY 18 Excavation 18 Survey 19 2.3 ARCHAEOLOGICAL MATERIAL 21 Settlement Sites from Surveys and Excavations 21 The Sites Reclassified 25 Chronological Considerations 28 2.4 WRITTEN SOURCES 33 Ancient Literature 33 Inscriptions 35 2.5 CONCLUSIONS 37 3 GEOLOGY AND ROMAN VILLAS 38 3.1 BACKGROUND 38 3.2 GEOLOGY OF THE ROMAN CAMPAGNA 40 3.3 THE CHANGING LANDSCAPE OF THE ROMAN CAMPAGNA 42 3.4 WRITTEN SOURCES FOR THE USE OF GEOLOGICAL RESOURCES 44 3.5 ARCHAEOLOGY OF BUILDING MATERIALS 47 3.6 INTEGRATING THE EVIDENCE 50 Avoiding -

Antioch Mosaics and Their Mythological and Artistic Relations with Spanish Mosaics
JMR 5, 2012 43-57 Antioch Mosaics and their Mythological and Artistic Relations with Spanish Mosaics José Maria BLÁZQUEZ* – Javier CABRERO** The twenty-two myths represented in Antioch mosaics repeat themselves in those in Hispania. Six of the most fa- mous are selected: Judgment of Paris, Dionysus and Ariadne, Pegasus and the Nymphs, Aphrodite and Adonis, Meleager and Atalanta and Iphigenia in Aulis. Key words: Antioch myths, Hispania, Judgment of Paris, Dionysus and Ariadne, Pegasus and the Nymphs, Aphrodite and Adonis, Meleager and Atalanta, Iphigenia in Aulis During the Roman Empire, Hispania maintained good cultural and economic relationships with Syria, a Roman province that enjoyed high prosperity. Some data should be enough. An inscription from Málaga, lost today and therefore from an uncertain date, seems to mention two businessmen, collegia, from Syria, both from Asia, who might form an single college, probably dedicated to sea commerce. Through Cornelius Silvanus, a curator, they dedicated a gravestone to patron Tiberius Iulianus (D’Ors 1953: 395). They possibly exported salted fish to Syria, because Málaca had very big salting factories (Strabo III.4.2), which have been discovered. In Córdoba, possibly during the time of Emperor Elagabalus, there was a Syrian colony that offered a gravestone to several Syrian gods: Allath, Elagabab, Phren, Cypris, Athena, Nazaria, Yaris, Tyche of Antioch, Zeus, Kasios, Aphrodite Sozausa, Adonis, Iupiter Dolichenus. They were possible traders who did business in the capital of Bética (García y Bellido 1967: 96-105). Libanius the rhetorical (Declamatio, 32.28) praises the rubbles from Cádiz, which he often bought, as being good and cheap. -

ROMANO- BRITISH Villa A
Prehistoric (Stone Age to Iron Age) Corn-Dryer Although the Roman villa had a great impact on the banks The excavated heated room, or of the River Tees, archaeologists found that there had been caldarium (left). activity in the area for thousands of years prior to the Quarry The caldarium was the bath Roman arrival. Seven pots and a bronze punch, or chisel, tell house. Although this building us that people were living and working here at least 4000 was small, it was well built. It years ago. was probably constructed Farm during the early phases of the villa complex. Ingleby Roman For Romans, bath houses were social places where people The Romano-British villa at Quarry Farm has been preserved in could meet. Barwick an area of open space, in the heart of the new Ingleby Barwick housing development. Excavations took place in 2003-04, carried out by Archaeological Services Durham University Outbuildings (ASDU), to record the villa area. This included structures, such as the heated room (shown above right), aisled building (shown below right), and eld enclosures. Caldarium Anglo-Saxon (Heated Room) Winged With the collapse of the Roman Empire, Roman inuence Preserved Area Corridor began to slowly disappear from Britain, but activity at the Structure Villa Complex villa site continued. A substantial amount of pottery has been discovered, as have re-pits which may have been used for cooking, and two possible sunken oored buildings, indicating that people still lived and worked here. Field Enclosures Medieval – Post Medieval Aisled Building Drove Way A scatter of medieval pottery, ridge and furrow earthworks (Villa boundary) Circular Building and early eld boundaries are all that could be found relating to medieval settlement and agriculture. -
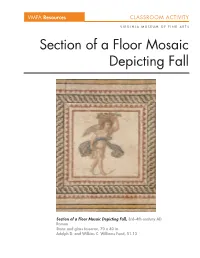
Section of a Floor Mosaic Depicting Fall
VMFA Resources CLASSROOM ACTIVITY VIRGINIA MUSEUM OF FINE ARTS Section of a Floor Mosaic Depicting Fall Section of a Floor Mosaic Depicting Fall, 3rd–4th century AD Roman Stone and glass tesserae, 70 x 40 in. Adolph D. and Wilkins C. Williams Fund, 51.13 VMFA Resources CLASSROOM ACTIVITY VIRGINIA MUSEUM OF FINE ARTS Object Information Romans often decorated their public buildings, villas, and houses with mosaics—pictures or patterns made from small pieces of stone and glass called tesserae (tes’-er-ray). To make these mosaics, artists first created a foundation (slightly below ground level) with rocks and mortar and then poured wet cement over this mixture. Next they placed the tesserae on the cement to create a design or a picture, using different colors, materials, and sizes to achieve the effects of a painting and a more naturalistic image. Here, for instance, glass tesserae were used to add highlights and emphasize the piled-up bounty of the harvest in the basket. This mosaic panel is part of a larger continuous composition illustrating the four seasons. The seasons are personified aserotes (er-o’-tees), small boys with wings who were the mischievous companions of Eros. (Eros and his mother, Aphrodite, the Greek god and goddess of love, were known in Rome as Cupid and Venus.) Erotes were often shown in a variety of costumes; the one in this panel represents the fall season and wears a tunic with a mantle around his waist. He carries a basket of fruit on his shoulders and a pruning knife in his left hand to harvest fall fruits such as apples and grapes. -

Unique Representation of a Mosaics Craftsman in a Roman Pavement from the Ancient Province Syria
JMR 5, 2012 103-113 Unique Representation of a Mosaics Craftsman in a Roman Pavement from the Ancient Province Syria Luz NEIRA* The subject of this paper is the study of the figured representation of a mosaics-craftsman in a fragmentary pavement, preserved in the National Museum of Denmark in Copenhagen. Of unknown provenance, apparently comes from the territory of ancient Syria in the Eastern Roman Empire. Such representation is a hapax, not only in the Roman mosaics of Syria, but also in the corpus of Roman Empire, since, although several mosaic inscriptions in some pavements, which show the name of the mosaic artisans and / or different names for different functions of the trades related to the development of mosaics, and even the reference to the workshop, who were teachers or members of his team of craftsmen, the figured representation of a mosaicist, in the instant to be doing his work, is truly unique. Keywords: mosaic, mosaics-craftsman, Syria, Eastern Roman Empire, Late Antiquity. When in 1998 I had the opportunity to visit the National Museum of Denmark in Copenhagen, I could see between the collections of exposed mosaics a fragment with the figure of a man represented at the instant of having, hammer in hand, the tesserae of a mosaic. Years later, when tackling a study on the jobs of artists and artisans in the roman mosaics1, checked its absence in the bibliography, nevertheless extensive and prolix on the subject, and put me in contact with the director of the Classical Antiquities Department in the Danish Museum, Dr. John Lund, who, to my questions2 about the origin of the fragment, kindly answered me. -

Work at the Ancient Roman Villa: Representations of the Self, the Patron, and Productivity Outside of the City
Wesleyan University The Honors College Work at the Ancient Roman Villa: Representations of the Self, the Patron, and Productivity Outside of the City by Emma Graham Class of 2019 A thesis submitted to the faculty of Wesleyan University in partial fulfillment of the requirements for the Degree of Bachelor of Arts with Departmental Honors from the College of Letters and with Departmental Honors in Classical Civilizations Middletown, Connecticut April, 2019 TABLE&OF&CONTENTS! ! Acknowledgements! 2! ! Introduction! 3! Villa%Rustica%versus%Villa%Maritima%% 10% % % % % % % 2% Chapter!One:!Horace! 15! Remains!of!Horace’s!Villa% 18% Satire%2.6!on!Horace’s!Villa% 25% Chapter!Two:!Statius! 38! Silvae%1.3!on!the!Villa!of!Vopiscus%% 43% Silvae%2.2!on!the!Villa!of!Pollius!Felix%% 63% Chapter!Three:!Pliny!the!Younger! 80! Remains!of!Pliny!the!Younger’s!Tuscan!Villa%% 84% Epistula%5.6!on!Pliny!the!Younger’s!Tuscan!Villa%% 89% Epistula%9.36!on!Pliny!the!Younger’s!Tuscan!Villa% 105% Pliny!the!Younger’s!Laurentine!Villa% 110% Epistula%1.9!on!Pliny!the!Younger’s!Laurentine!Villa%% 112% Epistula%2.17!on!Pliny!the!Younger’s!Laurentine!Villa% 115% Conclusion!! 130! ! Appendix:!Images! 135! Bibliography!! 150! ! ! ! ! 1! ACKNOWLEDGEMENTS!! ! To!the!places!I!have!worked.!Third!floor!of!Olin!Library!next!to!the!window,!with! a!strong!diagonal!light!from!the!left!always!illuminating!my!desK.!The!College!of! Letters!library,!with!free!coffee!that!sustained!me!and!endless!laughter!of!friends! that!are!so!dear!to!me.!My!room!on!Home!Ave.,!at!my!desk!under!the!large!poster! -

Roman Woman, Culture, and Law by Heather Faith Wright Senior Seminar
Roman Woman, Culture, and Law By Heather Faith Wright Senior Seminar: HST 499 Professor John L. Rector Western Oregon University June 5, 2010 Readers Professor Benedict Lowe Professor Laurie Carlson Copyright @ Heather Wright, 2010 2 The topic of my senior thesis is Women of the Baths. Women were an important part of the activities and culture that took place within the baths. Throughout Roman history bathing was important to the Romans. By the age of Augustus visiting the baths had become one of the three main activities in a Roman citizen’s daily life. The baths were built following the current trends in architecture and were very much a part of the culture of their day. The architecture, patrons, and prostitutes of the Roman baths greatly influenced the culture of this institution. The public baths of both the Roman Republic and the Roman Empire were important social environment to hear or read poetry and meet lovers. Patrons were expected to wear special bathing costumes, because under various emperors it was illegal to bathe nude. It was also very important to maintain the baths; they were, at the top of the Roman government's list of social responsibilities. The baths used the current trends in architecture, and were very much a part of the culture of the day. Culture within the Roman baths, mainly the Imperial and Republican baths was essential to Roman society. The baths were complex arenas to discuss politics, have rendezvous with prostitutes and socialize with friends. Aqueducts are an example of the level of specialization which the Romans had reached in the glory days of the Republic. -

The Monumental Villa at Palazzi Di Casignana and the Roman Elite in Calabria (Italy) During the Fourth Century AD
The Monumental Villa at Palazzi di Casignana and the Roman Elite in Calabria (Italy) during the Fourth Century AD. by Maria Gabriella Bruni A dissertation submitted in partial satisfaction of the Requirements for the degree of Doctor of Philosophy in Classical Archaeology in the GRADUATE DIVISION of the UNIVERSITY OF CALIFORNIA Committee in Charge Professor Christopher H. Hallett, Chair Professor Ronald S. Stroud Professor Anthony W. Bulloch Professor Carlos F. Noreña Fall 2009 The Monumental Villa at Palazzi di Casignana and the Roman Elite in Calabria (Italy) during the Fourth Century AD. Copyright 2009 Maria Gabriella Bruni Dedication To my parents, Ken and my children. i AKNOWLEDGMENTS I am extremely grateful to my advisor Professor Christopher H. Hallett and to the other members of my dissertation committee. Their excellent guidance and encouragement during the major developments of this dissertation, and the whole course of my graduate studies, were crucial and precious. I am also thankful to the Superintendence of the Archaeological Treasures of Reggio Calabria for granting me access to the site of the Villa at Palazzi di Casignana and its archaeological archives. A heartfelt thank you to the Superintendent of Locri Claudio Sabbione and to Eleonora Grillo who have introduced me to the villa and guided me through its marvelous structures. Lastly, I would like to express my deepest gratitude to my husband Ken, my sister Sonia, Michael Maldonado, my children, my family and friends. Their love and support were essential during my graduate -

Pompeii and the Roman Villa
Pompeii and the Roman Villa ART AND CULTURE AROUND THE BAY OF NAPLES __________________________________________________________________________________________________ HE ANCIENT GREEK PHILOSOPHER EPICURUS STATED: “PLEASURE IS THE BEGINNING and end of living happily.” This statement rang true for prominent Romans who spent their leisure time in luxurious villas and houses in the towns of TPompeii, Herculaneum, and other ancient Roman towns that were centers of activity along the Bay of Naples in the first century BC and the first century AD. Epicurus’s philosophy appealed to many Romans who retreated to their country homes in the spring and summer months to enjoy a respite from their working lives in Rome. Pompeii, in the region of Campania, retained its Greek culture and character after becoming a Roman colony in 80 BC. The Romans considered Greece a source of culture, beauty, and wisdom, and knowledge of Greek culture was a status symbol that signaled refinement and education. Greek influence pervaded the decor of Roman residences around the Bay of Naples and was reflected in the works of art both acquired and emulated by Roman patrons. Some Romans, when on vacation, even wore Greek dress—such as a chiton for men or a peplos for women—rather than the standard toga of the day. These curriculum materials explore the cultural and artistic life in Pompeii and other towns around the Bay of Naples in the centuries leading up to the eruption of Vesuvius in the year 79. Two works of art, the mosaic Plato’s Academy (1st century BC–1st century AD) and the fresco Garden Scene (1st century BC–1st century AD), are examples of the embellishments applied to the gardens and interiors of Pompeian villas. -

Roman Art from the Louvre
Roman Art from the Louvre Resource for Educators American Federation of Arts Roman Art from the Louvre Resource for Educators American Federation of Arts Roman Art from the Louvre is organized by the American Federation of Arts and the Musée du Louvre. The exhibition is supported by an indemnity American Federation of Arts 305 East 47th Street, 10th floor from the Federal Council on the Arts and the Humanities. New York, NY 10017 212.988.7700 The AFA is a nonprofit institution that organizes art exhibitions for presen- www.afaweb.org tation in museums around the world, publishes scholarly exhibition cata- logues, and develops educational materials and programs. © 2007 American Federation of Arts All materials included in this resource may be reproduced for educational purposes. Please direct questions about this resource to: Suzanne Elder Burke Director of Education American Federation of Arts 212.988.7700 x226 [email protected] Exhibition Itinerary Indianapolis Museum of Art September 23, 2007–January 6, 2008 Seattle Art Museum February 21–May 11, 2008 Oklahoma City Museum of Art June 19–October 12, 2008 Design/Production: Emily Lessard Front cover: Fragment of a Relief of a Double Suovetaurilia Sacrifice (detail), 1st or 2nd quarter of 1st century A.D. (no. 4) Back cover: Knife Handle in the Shape of a Thracian Gladiator, 2nd half of 1st century A.D. (no. 6) CONTENTS About This Resource 4 Exhibition Overview 5 Ancient Roman Society 6 History of Ancient Rome Government—The Emperor and the Senate Citizenship Non-Citizens—Foreigners, Slaves, and Freedmen Leisure 10 The Baths Roman Theater Circus Maximus The Amphitheater Religion 11 Guide to Roman Gods and Goddesses 13 Guide to Roman Vessel Forms 16 Interesting Facts about Ancient Rome 18 Selected Works of Art 19 1. -
![World History--Part 1. Teacher's Guide [And Student Guide]](https://docslib.b-cdn.net/cover/1845/world-history-part-1-teachers-guide-and-student-guide-2081845.webp)
World History--Part 1. Teacher's Guide [And Student Guide]
DOCUMENT RESUME ED 462 784 EC 308 847 AUTHOR Schaap, Eileen, Ed.; Fresen, Sue, Ed. TITLE World History--Part 1. Teacher's Guide [and Student Guide]. Parallel Alternative Strategies for Students (PASS). INSTITUTION Leon County Schools, Tallahassee, FL. Exceptibnal Student Education. SPONS AGENCY Florida State Dept. of Education, Tallahassee. Bureau of Instructional Support and Community Services. PUB DATE 2000-00-00 NOTE 841p.; Course No. 2109310. Part of the Curriculum Improvement Project funded under the Individuals with Disabilities Education Act (IDEA), Part B. AVAILABLE FROM Florida State Dept. of Education, Div. of Public Schools and Community Education, Bureau of Instructional Support and Community Services, Turlington Bldg., Room 628, 325 West Gaines St., Tallahassee, FL 32399-0400. Tel: 850-488-1879; Fax: 850-487-2679; e-mail: cicbisca.mail.doe.state.fl.us; Web site: http://www.leon.k12.fl.us/public/pass. PUB TYPE Guides - Classroom - Learner (051) Guides Classroom Teacher (052) EDRS PRICE MF05/PC34 Plus Postage. DESCRIPTORS *Academic Accommodations (Disabilities); *Academic Standards; Curriculum; *Disabilities; Educational Strategies; Enrichment Activities; European History; Greek Civilization; Inclusive Schools; Instructional Materials; Latin American History; Non Western Civilization; Secondary Education; Social Studies; Teaching Guides; *Teaching Methods; Textbooks; Units of Study; World Affairs; *World History IDENTIFIERS *Florida ABSTRACT This teacher's guide and student guide unit contains supplemental readings, activities,