Movement Prototypes and Their Relationship in the Performance of a Gymnastics Floor Routine
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Fatigue, Complexity and Technical Execution in Cheerleading
Review Paper Fatigue, complexity and technical execution in cheerleading KATIE DONOVAN, KIRSTEN SPENCER 1 School of Sport and Recreation, Auckland University of Technology, New Zealand ABSTRACT Cheerleading is a technical, explosive and physically demanding sport. Currently there is very limited knowledge or specific research in regard to both routine fatigue and technical execution of skills at different levels of cheerleading performance. This review investigates the potential impact of fatigue on the performance of the technical back handspring manoeuvre and suggests avenues for future research. Four phases of movement are identified within the completed handspring. At each phase the variation in biomechanical factors of velocity, trajectory, angular momentum are examined as crucial determinants to successful skill execution. Keywords: Dynamic systems; Strength and conditioning; Velocity; Trajectory; Angular momentum; Back handstand. Cite this article as: Donovan, K., & Spencer, K. (2019). Fatigue, complexity and technical execution in cheerleading. Journal of Human Sport and Exercise, 14(3), 668-673. doi:https://doi.org/10.14198/jhse.2019.143.16 1Corresponding author. School of Sport and Recreation, Auckland University of Technology, New Zealand. E-mail: [email protected] Submitted for publication June 2018 Accepted for publication October 2018 Published September 2019 (in press December 2018) JOURNAL OF HUMAN SPORT & EXERCISE ISSN 1988-5202 © Faculty of Education. University of Alicante doi:10.14198/jhse.2019.143.16 668 | 2019 | ISSUE 3 | VOLUME 14 © 2019 University of Alicante Donovan et al. / Cheerleading complexity JOURNAL OF HUMAN SPORT & EXERCISE REVIEW Competitive cheerleading is a growing sport in New Zealand and all over the world with 6 competition levels. -

Original Article Biomechanical Characteristics of Sports Technique
Journal of Physical Education and Sport ® (JPES), 13(4), Art 84, pp. 533 - 538., 2013 online ISSN: 2247 - 806X; p-ISSN: 2247 – 8051; ISSN - L = 2247 - 8051 © JPES Original Article Biomechanical characteristics of sports technique key elements of the back layout somersault with 900° twist on floor in women’s artistic gymnastics POTOP VLADIMIR1, NICULESCU GEORGETA2, TRIBOI VASILE3 1Department of Physical Education and Sport, Ecological University of Bucharest, ROMANIA 2University ”Spiru Haret” of Bucharest, ROMANIA 3State University of Physical Education and Sport of Chisinau, MOLDOVA Published online: December 25, 2013 (Accepted for publication November 25, 2013) DOI:10.7752/jpes.2013.04084; Abstract: The main purpose of this paper is to highlight the kinematic and dynamic characteristics of the phasic structure of the acrobatic element called back layout somersault with 900° twist on floor in women’s artistic gymnastics. This scientific approach led to the organization of an ascertaining study conducted throughout the National Master Championship held from 16th to 18th of November 2012 in ”Nadia Comăneci” Multifunctional Hall of Onesti. A number of 5 gymnasts (finalists on floor) aged 12 to 14, members of the training junior team of Deva, participated in this study. The following methods have been used during the research: method of bibliographic study, method of pedagogical observation, method of video biomechanical analysis, using Physics Toolkit program, experimental method, statistical method (PyPlot) and method of graphical representation. The results of the kinematic characteristics of sports technique key elements used in back layout somersault with 900° twist on floor highlight the phasic sequence of the execution, in terms of preparatory movement made from round-off – back flip connection, moment of taking off of the floor – launching posture, multiplication of body posture (flight phase of the somersault) and the concluding posture – with landing or with launching posture for connection with a front tucked somersault. -
VIDEOS Title Creator Summary Format Call Number in This Cirtically-Acclaimed, Stop Motion Annimated Feature
VIDEOS Title Creator Summary Format Call Number In this cirtically-acclaimed, stop motion annimated feature. Dave Peck, an unemployed 28-year-old with no goals or aspirations, finds an ad for a book promising the meaning of life for only $9.99 Rosenthal, Tatia (1971 - ) DVD PN1997.2 .N55 DVD 2010 $9.99. Wishing to share his discovery, his path crosses with those of his unusual neighbors, who in their own bizarre ways, are all on their own search for hope and redemption. 11 Alive at Five Interviews with 11 Alive at Five VHS 1991 CPA PRES 11 ALIV Kerry McCarthy and Peter Hart 11 Alive Neighborhood 11 Alive Neighborhood Weather, Weather, November 12, 1996, 11 Alive November 12, 1996, Center for VHS 1996/1997 CPA PRES NEIG Center for Puppetry Arts Puppetry Arts 11 Alive News Story on Power of 11 Alive News Story on Power 11 Alive Wonder and Pinocchio, on September VHS 1995/1996 CPA PRES 11 POW of Wonder and Pinocchio 29, 1995. Czechoslovak-American 12 Sandals 99 VHS 12 SAND 99 Marionette Theatre 1980 Wayland and Madame WAYL MADA INTE DICK DVD Interview by Dick Maurice MAUR Footage from the 1992 Southeast 1992 Southeast Regional Regional Festival held in Charleston, VHS 1992 SE REGI FEST Festival South Carolina from July 30-August 1, 1992. Footage from the 1992 Southeast 1992 Southeast Regional Regional Festival held in Charleston, VHS 1992 SE REGI FEST 1 Festival Tape 1 South Carolina from July 30-August 1, 1992. Footage from the 1992 Southeast 1992 Southeast Regional Regional Festival held in Charleston, VHS 1992 SE REGI FEST 2 Festival Tape 2 South Carolina from July 30-August 1, 1992. -

TECHNICAL VAULT: FRONT HANDSPRING Page 1 of 6
USA Gymnastics Online: Technique: TECHNICAL VAULT: FRONT HANDSPRING Page 1 of 6 Men's Vault Technical Vault: Front Handspring Mas Watanabe, National Technical Coordinator Illustrations by Mas Watanabe and Steve Whitlock The handspring vault is used as the technical vault in the USA Gymnastics J.O. Compulsory program for all levels. This basic vault does not require complex technique in its performance, but through mastery of the basics, gymnasts will develop and refine essential techniques that will serve them well when learning other more complex vaults. The main components of vaulting (such as running form and speed, hurdle step onto the board, quick and powerful take-off from the board, turn over from the board to the horse and repulsion off the horse) can all be refined and developed by learning a technically good handspring vault. One of the important and critical technical aspects of the front handspring is the ability to utilize the power of full running speed and body rotation at the take-off without the concern of over rotation. If the gymnast slows down his running speed to control his body rotation in the post-flight, it defeats the purpose of this technical vault. The main focus of this article is to discuss the techniques coaches should look for in order to permit the gymnast to control post-flight rotation. Physical preparation 1. Body tightness in hollow and arched position The mid-section of the body needs to be very strong for the powerful take-off from the board as well as for a strong repulsion off the horse. -

Motion Analysis of a Back Handspring Sarah Knoll University of North Dakota
University of North Dakota UND Scholarly Commons Physical Therapy Scholarly Projects Department of Physical Therapy 2006 Motion Analysis of a Back Handspring Sarah Knoll University of North Dakota Jaclyn Minar University of North Dakota Melissa Moos University of North Dakota Follow this and additional works at: https://commons.und.edu/pt-grad Part of the Physical Therapy Commons Recommended Citation Knoll, Sarah; Minar, Jaclyn; and Moos, Melissa, "Motion Analysis of a Back Handspring" (2006). Physical Therapy Scholarly Projects. 260. https://commons.und.edu/pt-grad/260 This Scholarly Project is brought to you for free and open access by the Department of Physical Therapy at UND Scholarly Commons. It has been accepted for inclusion in Physical Therapy Scholarly Projects by an authorized administrator of UND Scholarly Commons. For more information, please contact [email protected]. MOTION ANALYSIS OF A BACK HANDSPRING by Sarah Knoll, Melissa Moos Bachelor of Science in Physical Therapy University of North Dakota, 2004 Jaclyn Minar Bachelor of Science in Biology University of North Dakota, 2003 A Scholarly Project Submitted to the Graduate Faculty of the Department of Physical Therapy School of Medicine University of North Dakota in partial fulfillment of the requirements for the degree of Doctor of Physical Therapy Grand Forks, North Dakota May 2006 This Scholarly Project, submitted by Sarah Knoll, Jaclyn Minar, Melissa Moos, in partial fulfillment of the requirements for the Degree of Doctor of Physical Therapy from the University of North Dakota, has been read by the Advisor and Chairperson of Physical Therapy under whom the work has been done and is hereby approved. -
2020-2021 Recreation Cheer Rules
2020-2021 Recreation Cheer Rules 2020 - 2021 Recreation Cheer Rules This document contains the competitive Recreation cheer division offerings for the 2019-2020 season. The age grid provides a list of divisions that may be offered by an Event Producer. An Event Producer does not have to offer every division listed. All Recreation programs must classify their teams as one of the following: • TRADITIONAL o Routines MUST consist of Cheer & Music combination. Cheer IS required. Basket Tosses are not permitted in the Traditional Divisions. Routine Max: 2:30 minutes Music Max: 1:30 • PERFORMANCE o Routines can consist of Cheer & Music combination. Cheer is NOT required. Routine Max: 2:30 minutes Traditional and Performance routines may be performed on a spring or foam floor. Check with your event producer to determine what type of floor will be used at the competition. Awarding Grand Champion • Divisions o We will not combine Performance and Traditional for the title of Grand Champion • Level o Levels will be combined for purpose of awarding Grand Champion (ex. Level 2 and Level 2.1 will be combined as Level 2 Grand Champion) 2020 - 2021 Recreation Cheer Rules GENERAL RECREATION ORGANIZATION GUIDELINES & REQUIREMENTS: • Organizations must submit a Rec Verification form when they register for their first Rockstar Rumble competition. • Team must submit a roster with birthdates for each athlete. Roster must be updated prior to each event and sent to your rep. A copy of this roster must also be brought to registration at each competition. • Team members must fulfill the age requirement for the division that they are entering on/before December 31, 2020. -

Understanding Competitive Gymnastics a Guide For
Understanding Competitive Gymnastics A Guide for Parents Contents Competitive Program Options ...................................................................................................................... 3 Compulsory Vs. Optional .......................................................................................................................... 3 USAG Junior Olympic Program.................................................................................................................. 3 Levels 3 and 4. ....................................................................................................................................... 3 Levels 5 and 6 ........................................................................................................................................ 3 Levels 7-10 and Beyond ........................................................................................................................ 3 USAG Xcel Program ................................................................................................................................... 4 Bronze: .................................................................................................................................................. 4 Silver: ..................................................................................................................................................... 4 Gold: ..................................................................................................................................................... -
Gymnastics Terminology Final.Pdf
1 CONTENTS Topic Page Number General Gymnastics Definitions ………………………………………………. 3 Definitions Related to: ♦ Schedule ………………………………………………………………………. 5 ♦ Competitive Levels ……………………………………………………….. 6 ♦ Performance Terminology ……………………………………………. 9 ♦ Equipment ……………………………………………………………………. 11 ♦ Conditioning …………………………………………………………………. 14 ♦ Body Positioning …………………………………………………………… 16 ♦ Dance Skills …………………………………………………………………… 18 ♦ General Skills Related to Floor and/or Beam …………………. 20 ♦ Specific Skills related to: o Floor Exercise ………………………………………………….... 24 o Bar Terms (UPB, HB*, PB*) (*Mens) ……………… 25 Release Moves ……………………………………….. 26 Dismounts ………………………………………………. 26 Grip Positions …………………………………………. 27 o Vault ………………………………………………………………….. 28 Definitions Related to Female Gymnastics: ♦ Equipment ……………………………………………………………………. 29 ♦ Balance Beam ………………………………………………………………. 29 ♦ Uneven Parallel Bars …………………………………………………….. 29 Definitions Related to Male Gymnastics: ♦ Pommel Horse ……………………………………………………………… 31 ♦ Rings ……………………………………………………………………………. 33 ♦ Parallel Bars …………………………………………………………………. 35 ♦ High Bar ……………………………………………………………………….. 36 o Release Skills …………………………………………………….. 36 2 General Sport Club Private gymnastics training facility not associated with high school. Some can be park districts, most are privately owned by coaches, parents, or business minded people. The club usually provides training for tots all the way through the highest level of athlete that they have. In order to compete USA Gymnastics Sanctioned meets; you have to be associated -
Development Coaches' Course
DEVELOPMENT COACHES’ COURSE Hands On Training: W200 USA Gymnastics • 132 E Washington St. Suite 700 • Indianapolis, IN 46204 • usagymnasticsuniversity.org DEVELOPMENT COACHES’ COURSE Hands On Training: W200 USA Gymnastics is the recognized national governing body for the sport of gymnastics in the United States in accordance with the Ted Stevens Olympic and Amateur Sports Act. USA Gymnastics prescribes rules and standards for competition in the sport, generally promotes, regulates, governs and fosters gymnastics in the United States, and educates and informs the American public concerning the sport. © 2011 This publication is a copyrighted publication of USA Gymnastics and is protected by United States copyright law. No part of this publication may be reproduced, stored in a retrieval system, or transmitted or otherwise published in any form or by any means, including electronic, mechanical, photocopying, recording, or otherwise, without the prior permission of USA Gymnastics. For permission to duplicate any portions of W200, please contact: USA Gymnastics Educational Services, 132 E. Washington, Suite 700, Indianapolis, IN 46204. No service mark, copyright, or other notice may be altered or removed from this publication. The materials in this publication are provided for informational and educational purposes. USA Gymnastics is not responsible for results, outcomes or consequences of the use or application of any information or materials contained in this publication. All warranties of any nature, express or implied, are disclaimed. Foreword This workbook is a part of the W200 Development Coaches’ Course: Hands on Training. It is intended to be used as an outline of skills being taught during the course. It is recommended that notes be taken during the course. -
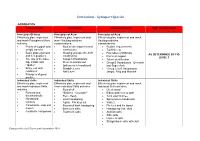
Curriculum - Gymsport Specific
Curriculum - Gymsport Specific ACROBATICS Intermediate Advanced Advanced Silver High Performance Principles Of Acro Principles of Acro Principles of Acro Effectively plan, implement Effectively plan, implement and Effectively plan, implement and teach and teach Principles of Acro teach Vaulting activities. Vaulting activities. activities. considerations: considerations: Points of support and Routine development and Routine requirements weight transfer construction Tariff sheets Basic grips and hand Shaping and specific ACR FIG tables of Difficulty AS DETERMINED BY FIG and feet positions conditioning Points of support LEVEL 3 The role of the base, Group A Handstands Talent identification top, middle and Press to Handstand Group B Handstands - Overarch “spotter” Split press to handstand and Super Arch Entry, exit and Straddle Lever 'Group C to E Handstands readiness Half Lever Jaegar, Flag and Planche Principles of good posture Individual skills Individual Skills Individual Skills Effectively plan, implement Effectively plan, implement and Effectively plan, implement and teach and teach Individual Skills teach Individual Skills activities. Individual Skills activities. activities. Round-off Chest stand Forward and "Balance - Crocodile" Elbow walk over to split backward rolls Flex - Healy Tuck sault to knee Handstand Front handspring Split press to handstand Limbers Agility - Flic step out Valdez Cartwheels - side and Round-off back handspring Flic tuck and flic layout step in Back tuck salto Handspring front salto Courbette / snapdown Front tuck salto Arabian salto Side salto Layout to split Straight back salto with 360’ Gymsport Practical Curriculum September 2014 Pair Balance Pair balance Pair balance Effectively plan, implement Effectively plan, implement and Effectively plan, implement and teach and teach Pair Balance teach Pair balance activities. -

Legends of OSU Gymnastics, October 4, 2014
Legends of OSU Gymnastics, October 4, 2014 Title “Two National Champions Reflect on Oregon State Gymnastics” Date October 4, 2014 Location Dilg residence, Portland, Oregon. Summary In interview 2, Mary Law and Joy Petersen discuss their careers in gymnastics. The session begins with their reflections on first interests and involvement in gymnastics, their recruitment to OSU, and their experience of the impact of Title IX. Law and Petersen also comment on early (and, in many ways, inadequate) gymnastics facilities at OSU, gymnasts' diets, training routines, and memories of competing in Gill Coliseum. The duo likewise remarks on travelling to away meets, their Olympics aspirations, the environment at the NCAA championships, the coaching staffs under which they trained, and injuries that they both suffered. The interview then turns to memories of specific standout meets, the community that supports Oregon State gymnastics, and the circumstances by which Law and Petersen came to know one another. The session concludes with Law and Petersen reflecting on the conclusions of their gymnastics careers and lending their thoughts on the broader impact that their athletic careers have made on their lives. Interviewees Mary Law, Joy Petersen Interviewer Janice Dilg Website http://scarc.library.oregonstate.edu/oh150/gymnastics/ PDF Created November 16, 2017 Legends of OSU Gymnastics, “Two National Champions Reflect on Oregon State Gymnastics”, October 4, 2014 Page 2 of 19 Transcript Janice Dilg: So, today is October 4th, 2014, we're in Portland Oregon, my name is Janice Dilg, I'm the oral historian with OSU Oral History Project and we have now had Mary Ayotte-Law join us along with Joy Selig-Petersen, and the two of them are going to talk together about their individual and kind of joint memories of being involved in the wonderful gymnastics program at Oregon State University. -

International Performance Coach (IPC) Policy V.1.1
International Performance Coach (IPC) Policy v.1.1 International Performance Coach (IPC) What is an IPC? An IPC is an award granted to a coach in respect of performance at international level. It is awarded to individuals who have worked with and developed gymnasts who have excelled on the international stage and is recognition for the skills and knowledge the coach has developed to obtain these results. Eligibility Please read this policy and eligibility criteria carefully before requesting an IPC. If you have any questions or require clarification of the content, please contact the Education Coordinator – Performance & Judging at [email protected]. Applications for an IPC are open to coaches who meet all of the following eligibility criteria: 1. Level 5 or High Performance Coach (or equivalent) qualified for a minimum of 4 years. 2. Must have a gymnast currently on squad or have had a gymnast on squad/GB Team within the past 8 years. 3. Must be directly associated to a gymnast, either through the national programme or as a personal coach, who has medalled at an Olympic Games, World Championships, World Games or European Championships at senior level. 4. Coaches can be from both Olympic and Non-Olympic disciplines. Application Process If you wish to obtain your IPC, you will be required to complete an application form followed by a presentation to a panel. Please request an IPC application form from the Education Department by emailing the Education Coordinator – Performance & Judging at [email protected]. Once the form has been completed, please return it electronically to the Education Coordinator – Performance & Judging.