Terminal Report: Project 3
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Study on Medium Capacity Transit System Project in Metro Manila, the Republic of the Philippines
Study on Economic Partnership Projects in Developing Countries in FY2014 Study on Medium Capacity Transit System Project in Metro Manila, The Republic of The Philippines Final Report February 2015 Prepared for: Ministry of Economy, Trade and Industry Ernst & Young ShinNihon LLC Japan External Trade Organization Prepared by: TOSTEMS, Inc. Oriental Consultants Global Co., Ltd. Mitsubishi Heavy Industries, Ltd. Japan Transportation Planning Association Reproduction Prohibited Preface This report shows the result of “Study on Economic Partnership Projects in Developing Countries in FY2014” prepared by the study group of TOSTEMS, Inc., Oriental Consultants Global Co., Ltd., Mitsubishi Heavy Industries, Ltd. and Japan Transportation Planning Association for Ministry of Economy, Trade and Industry. This study “Study on Medium Capacity Transit System Project in Metro Manila, The Republic of The Philippines” was conducted to examine the feasibility of the project which construct the medium capacity transit system to approximately 18km route from Sta. Mesa area through Mandaluyong City, Ortigas CBD and reach to Taytay City with project cost of 150 billion Yen. The project aim to reduce traffic congestion, strengthen the east-west axis by installing track-guided transport system and form the railway network with connecting existing and planning lines. We hope this study will contribute to the project implementation, and will become helpful for the relevant parties. February 2015 TOSTEMS, Inc. Oriental Consultants Global Co., Ltd. Mitsubishi Heavy -

SEMI-ANNUAL REPORT 5 October 2020 – March 2021 (FY 2020-2021, SA5)
SEMI-ANNUAL REPORT 5 October 2020 – March 2021 (FY 2020-2021, SA5) Award Number: AID-OFDA-G-17-0081 Prepared for: United States Agency for International Development Bureau of Humanitarian Assistance TABLE OF CONTENTS Project Summary 3 Project Management 5 Results by Objective 6- 9 Plans for the Next Reporting Period 10 Challenges 10 Highlights 11 Appendix 14 Attachment A: Online meeting with the partner barangays 13 Attachment B: “Barangay Paskamustahan” 13 Attachment C: MSME Resilience E-Learning 14 Attachment D: Physical visits to the partner barangays 15 Attachment E: Pre-Program Review and Planning Workshop of Makati DRRMO 16 Attachment F: Technical Consultation Webinar 16 Attachment G: Summary of results of the Leaning Needs Assessment 17 Attachment H: iADAPT course pages for the PSCP Training e-course 18 Attachment I: PSCP Orientation and iADAPT Walkthrough 19 Attachment J: Live webinars and writeshops 20 Attachment K: Number of participants taking the PSCP Training e-course through 21 iADAPT (As of 31 March 2020) PROJECT SUMMARY hilippine Disaster Resilience Foundation (PDRF) is 3) Establishing Public-Private Partnership in Disaster Risk Reduction implementing a project to build a stronger partnership between and Management the Philippine government and the private sector, specifically In line with RA 10121’s intent to recognize and strengthen capacities of P on how the government can work together with companies LGUs and communities in mitigating and preparing for, responding to, before, during and after disasters. While the existing Republic Act 10121 and recovering from the impact of disasters, the project aims to localize (Philippine Disaster Management Act of 2010) clearly outlines the roles DRRM at the barangay level by engaging various stakeholders in the and responsibilities government agencies play in relation to disaster assessment of local capacities to determine gaps and how to address them management, it currently does not have the same protocols spelled out to better respond to needs of the communities. -

CHAPTER 1: the Envisioned City of Quezon
CHAPTER 1: The Envisioned City of Quezon 1.1 THE ENVISIONED CITY OF QUEZON Quezon City was conceived in a vision of a man incomparable - the late President Manuel Luis Quezon – who dreamt of a central place that will house the country’s highest governing body and will provide low-cost and decent housing for the less privileged sector of the society. He envisioned the growth and development of a city where the common man can live with dignity “I dream of a capital city that, politically shall be the seat of the national government; aesthetically the showplace of the nation--- a place that thousands of people will come and visit as the epitome of culture and spirit of the country; socially a dignified concentration of human life, aspirations and endeavors and achievements; and economically as a productive, self-contained community.” --- President Manuel L. Quezon Equally inspired by this noble quest for a new metropolis, the National Assembly moved for the creation of this new city. The first bill was filed by Assemblyman Ramon P. Mitra with the new city proposed to be named as “Balintawak City”. The proposed name was later amended on the motion of Assemblymen Narciso Ramos and Eugenio Perez, both of Pangasinan to “Quezon City”. 1.2 THE CREATION OF QUEZON CITY On September 28, 1939 the National Assembly approved Bill No. 1206 as Commonwealth Act No. 502, otherwise known as the Charter of Quezon City. Signed by President Quezon on October 12, 1939, the law defined the boundaries of the city and gave it an area of 7,000 hectares carved out of the towns of Caloocan, San Juan, Marikina, Pasig, and Mandaluyong, all in Rizal Province. -

Highlights of Accomplishment Report CY 2016
Highlights Of Accomplishment Report CY 2016 Prepared by: Corporate Planning and Management Staff Table of Contents TRAFFIC DISCIPLINE OFFICE ……………….. 1 TRAFFIC ENFORCEMENT Income from Traffic Fines Traffic Direction & Control; Metro Manila Traffic Ticketing System 60-Kph Speed Limit Enforcement Bus Management and Dispatch System South West Integrated Provincial Transport System (SWIPTS) Enhance Bus Segregation System (EBSS) Anti-Illegal Parking Operations Enforcement of the Yellow Lane and Closed-Door Policy Anti-Colorum and Out-of-Line Operations Anti-Jaywalking Operations EDSA Bicycle-Sharing Scheme Operation of the TVR Redemption Facility Personnel Inspection and Monitoring Road Emergency Operations (Emergency Response and Roadside Clearing) Unified Vehicular Volume Reduction Program (UVVRP) Towing and Impounding Other Traffic Management Measures implemented in 2016 TRAFFIC ENGINEERING Design and Construction of Pedestrian Footbridges Upgrading of Traffic Signal System Application of Thermoplastic and Traffic Cold Paint Pavement Markings Traffic Signal Operation and Maintenance Fabrication and Manufacturing/ Maintenance/ Installation of Traffic Road Signs/ Facilities Other Special Projects TRAFFIC EDUCATION Institute of Traffic Management Other Traffic Improvement-Related/ Special Projects/ Activities Metro Manila Traffic Navigator MMDA Twitter Service MMDA Traffic Mirror Implementation of Christmas Lane Oplan Kaluluwa (All Saints Day Operation) METROBASE FLOOD CONTROL & SEWERAGE MANAGEMENT OFFICE (FCSMO) -

Appendix 7 Information and Data of Existing Outfall
Appendix 7 Information and Data of Existing Outfall Data Collection Survey for Sewerage Systems in West Metro Manila Outfall Location A Date Surveyed: 13 & 17 May 2016 City/Town: Las Pinas Weather: Fair - Cloudy - Rainy p p Notes: e n N1 - Water Depth (Full / PartlyFull) N6 - Water Color (Clear) N11 - with floating trash/garbage LPR - Las Pinas River Outfall Identification d N2 - Water Depth (Half) N7 - Water Color (Brown) U/S - upstream IC - Ilet Creek LP-OF000 i x N3 - Water Depth (Low / Below Half) N8 - Water Color (Dark/Murky) D/S - downstream 7 N4 - Water Flow (Stagnant) N9 - Water Odor (None) OF - outfall outfall N5 - Water Flow (Flowing) N10 - Water Odor (Foul) LP - Las Pinas number E City/Municipality x i s OUTFALL INFORMATION t i Coordinates Findings/Observations n Tributary g Main River UTM N (Latitude) E (Longitude) Other Remarks Photo Reference No. River/Waterway ID N1 N2 N3 N4 N6N5N7 N8 N9 N10 N11 N E Deg. Min. Sec. Deg. Min. Sec. O u 4.00m wide box culvert crossing t f Diego Cera Avenue, catchment area a Zapote River LP-OF1 1600478.96 281172.44 14 28 5.59 120 58 11.43 X X XXX - residential & commercial, on-going 4088, 4089 l l construction of sluiceway and bridge D/S of box culvert LP-OF2/LSP- 0.30m dia pipe culvert, no water Las Piñas River 1601179.76 282053.89 14 28 28.64 120 58 40.65 4091 OF003 flowing, catchment area - residential App7-1 LP-OF3/LSP- 0.30m dia pipe culvert, no water Las Piñas River 1601180.74 282046.71 14 28 28.67 120 58 40.41 4091 OF004 flowing, catchment area - residential 0.50m wide concrete box conduit located U/S of Pulang Lupa bridge, LP-OF4/LSP- Las Piñas River 1601159. -

Highlights of Accomplishment Report CY 2015
Highlights Of Accomplishment Report CY 2015 Prepared by: Corporate Planning and Management Staff Table of Contents TRAFFIC DISCIPLINE OFFICE ……………….. 1 TRAFFIC ENFORCEMENT Income from Traffic Fines Traffic Direction & Control; Metro Manila Traffic Ticketing System 60-Kph Speed Limit Enforcement Bus Management and Dispatch System Southwest Integrated Provincial Transport System (SWIPTS) Enhance Bus Segregation System (EBSS) Anti-Illegal Parking Operations Enforcement of the Yellow Lane and Closed-Door Policy Anti-Colorum and Out-of-Line Operations Anti-Jaywalking Operations EDSA Bicycle-Sharing Project Operation of the TVR Redemption Facility Monitoring of Field Personnel Road Emergency Operations (Emergency Response and Roadside Clearing) Continuing Implementation of the Unified Vehicular Volume Reduction Program (UVVRP) Other Traffic Management Measures implemented in 2014 TRAFFIC ENGINEERING Design and Construction of Pedestrian Footbridges Upgrading of Traffic Signal System Application of Thermoplastic Pavement Markings Traffic Signal Operation and Maintenance Fabrication and Manufacturing of Traffic Road Signs/ Facilities Other TEC-TED Special Projects TRAFFIC EDUCATION INSTITUTE OF TRAFFIC MANAGEMENT Other Traffic Improvement-Related/ Special Projects/ Activities Metro Manila Traffic Navigator MMDA Twitter Service MMDA Traffic Mirror Implementation of Christmas Lane Oplan Kaluluwa (All Saints Day Operation) METROBASE FLOOD CONTROL & SEWERAGE MANAGEMENT OFFICE (FCSMO) ……………….. 19 SOLID WASTE MANAGEMENT OFFICE -

Midpacific Volume12 Issue1.Pdf
JULY, 1916. PRICE, 25 CENTS A COPY. $2.00 A YEAR 1111D ACIDIC 41ACAZINE CLOSED PU 620 .M5 - In 1915 San Francisco invited the world. Honolulu, at the crossroads of the Great Ocean. invites all Pacific nations as its guests in 1917. See within. Speedy Trains in New South Wales The Mother State of the Australian Commonwealth. The World's Famous Railway Bridge Over the Hawkesbury River, N. S. W. All the year round New South Wales is railway bridge. Here is 'to be found the best place for the tourist. From Syd- glorious river scenery as well as excellent ney and New Castle, as well as from points fishing and camping grounds. By rail also in other states, there are speedy trains, with is reached the splendid trout fishing streams comfortable accommodations, at very cheap of New South Wales, stocked with fry, rates to the interesting points of the Mother yearling and two year old trout. State of the Australian Commonwealth. Beautiful waterfalls abound throughout Within a few hours by rail of the metrop- the state and all beauty spots are reached olis of Sydney are located some of the most after a few hours' comfortable trip fron- wonderful bits of scenery in the world. It Sydney. is but a, half afternoon's train ride to the beautiful Blue Mountains, particularly fa- Steamship passengers arriving at Sydney mous for the exhilarating properties of at- disembark at Circular Quay. Here the mosphere. Here and in other parts of the city tramways (electric traction) converge, state are the world's most wonderful and and this is the terminus of thirty routes, beautiful limestone caverns. -

Asset Preservation-Rehabilitation/ Reconstruction/Upgrading of Damaged Paved Roads-Secondary Roads, G
DEPARTMENT OF PUBLIC WORKS AND HIGHWAYS NATIONAL CAPITAL REGION 2nd STREET PORT AREA, MANILA ASSET PRESERVATION-REHABILITATION/ RECONSTRUCTION/UPGRADING OF DAMAGED PAVED ROADS-SECONDARY ROADS, G. ARANETA AVE.,(SO5617LZ) K0009 + -2026 - K0009 + 689 SUBMITTED BY : RECOMMENDED: APPROVED: CHIEF, PLANNING AND DESIGN DIVISION ASSISTANT REGIONAL DIRECTOR REGIONAL DIRECTOR DATE: DATE: DATE: SCOUT BORROMEO TIMOG AVE EAST AVENUE MAYON AVENUE QUEZON AVENUE SOUTH AVE PANAY AVEMOTHER IGNACIA AVE D. TUAZON TIMOG AVE STO. DOMINGO N. S. AMORANTO SR. AVENUE EPIFANIO DE LOS SANTOS AVE. (EDSA) KAMIAS ROAD ROCES AVE TOMAS MORATO AVENUE SCOUT CHUATOCO DON ALEJANDRO ROCES AVENUE BANAWE DILIMAN CREEK D. TUAZON MARIA CLARA MAYON AVENUE BIAK NA BATO KAMUNING ROAD N. S. AMORANTO SR. AVENUE THIS SITE DILIMAN CREEK KALOOKAN CITY AURORA BLVD. DILIMAN CREEK DILIMAN QUEZON AVENUE CREEK EULOGIO RODRIGUEZ SR AVENUE ESTERO DE VITAS QUEZON CITY BLUMENTRITT E. RODRIGUEZ SR. BOULEVARD E. RODRIGUEZ SR. BLVD. AURORA BLVD. 15TH AVENUE MAKILING CALAMBA VANCOUVER MAYON AVENUE BLUMENTRITT GEN. ROMULO AVENUE RIZAL AVENUE ANTONIO M. MACEDA SIMOUN M. HEMADY DIMASALANG NICANOR ROXAS D.TUAZON GILMORE SAN JUAN RIVER MARIA CLARA P. TUAZON ST. LA MESA DAM TAYUMAN (63$f$ TAYUMAN (LAONG LAAN) AURORA BLVD N. DOMINGO MAIN AVENUE BAYANI EPIFANIO DE LOS SANTOS AVE. (EDSA) LIBERTY AVE. VALENZUELA CITY GRANADA (63$f$ C. BENITEZ SANTOLAN NAVOTAS ST. JOSEPH COL. BONI SERRANO QUEZON CITY M. EARNSHAW ORTIGAS AVE MALABON (63$f$ AURORA BOULEVARD ANAPOLIS ESTERO DE SAN LAZARO ESTERO DE MAGDALENA KALOOKAN CITY ESTERO DE LA RAINA CLARO M. RECTO AVENUEJ. FIGUERAS (BUSTILLOS) RAMON MAGSAYSAY BOULEVARD OLD STA. MESA P. GUEVARRA ORTIGAS AVENUE LEGARDA V. -
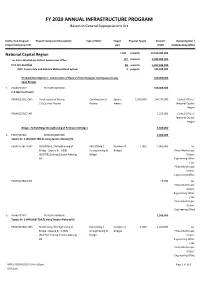
FY 2020 ANNUAL INFRASTRUCTURE PROGRAM Based on General Appropriations Act
FY 2020 ANNUAL INFRASTRUCTURE PROGRAM Based on General Appropriations Act UACS / Sub Program Project Component Description Type of Work Target Physical Target Amount Operating Unit / Project Component ID Unit (PHP) Implementing Office National Capital Region 1,651 projects 44,524,084,000 Las Piñas-Muntinlupa District Engineering Office 127 projects 2,935,899,000 CITY OF LAS PIÑAS 88 projects 1,857,184,000 OO1: Ensure Safe and Reliable National Road System 3 projects 154,500,000 Network Development - Construction of Flyovers/ Interchanges/ Underpasses/ Long 150,000,000 Span Bridges 1. P00402135LZ 310206100029000 150,000,000 C-5-Quirino Flyover P00402135LZ-CW1 Construction of Flyover - Construction of Square 1,050.000 144,750,000 Central Office / C-5-Quirino Flyover Flyover meters National Capital Region P00402135LZ-EAO 5,250,000 Central Office / National Capital Region Bridge - Retrofitting/ Strengthening of Permanent Bridges 4,500,000 2. P00401578LZ 310303100807000 2,000,000 Zapote Br. 2 (EB) (B01798LZ) along Zapote-Alabang Rd P00401578LZ-CW1 Retrofitting / Strengthening of Retrofitting / Number of 1.000 1,960,000 Las Bridge - Zapote Br. 2 (EB) Strengthening of Bridges Piñas-Muntinlupa (B01798LZ) along Zapote-Alabang Bridge District Rd Engineering Office / Las Piñas-Muntinlupa District Engineering Office P00401578LZ-EAO 40,000 Las Piñas-Muntinlupa District Engineering Office / Las Piñas-Muntinlupa District Engineering Office 3. P00401579LZ 310303100808000 2,500,000 Zapote Br. 3 (WB) (B01799LZ) along Zapote-Alabang Rd P00401579LZ-CW1 Retrofitting -

Metro Manila Urban Transportation Integration Study Technical Report No
METRO MANILA URBAN TRANSPORTATION INTEGRATION STUDY TECHNICAL REPORT NO. 2: MMUTIS DATABASE A-63 METRO MANILA URBAN TRANSPORTATION INTEGRATION STUDY TECHNICAL REPORT NO. 2: MMUTIS DATABASE A-64 METRO MANILA URBAN TRANSPORTATION INTEGRATION STUDY TECHNICAL REPORT NO. 2: MMUTIS DATABASE A-65 METRO MANILA URBAN TRANSPORTATION INTEGRATION STUDY TECHNICAL REPORT NO. 2: MMUTIS DATABASE ANNEX B Code Use For Encoded Survey Results Page No. 1. MMMUTIS Zoning System......................................................................................... B-1 2. Road Inventory Survey................................................................................................. B-7 3. Truck Traffic Survey .................................................................................................... B-7 4. Travel Speed Survey................................................................................................... B-10 5. Traffic Accident.......................................................................................................... B-11 6. Cordonline and Screenline ......................................................................................... B-15 7. Household Interview Survey (HIS)............................................................................ B-20 8. Public Transportation Routes ..................................................................................... B-31 9. Public Transport ......................................................................................................... B-45 -

ULAT SA BAYAN 2016 19Th Quezon City Council
ULAT SA BAYAN 2016 19th Quezon City Council TABLE OF CONTENTS I. Ulat sa Bayan ng Punong Tagapangasiwa 3 II. Landmark Legislations Administration and Governance 13 Economic Development 18 Social Development and Human Rights 21 Health 24 Housing 24 Women and Children 27 Education 28 Senior Citizen 32 Environment, Climate Change and Disaster Risk Reduction 34 Peace and Order 39 Tourism, Culture and Heritage 41 ASEAN Integration 43 III. 2015 National Local Legislative Award Executive Summary 47 Department of Interior and Local Government Philippine Councilors League IV. Legislative Accomplishments of the members of the 19th Quezon City Council District 1 Councilors 53 District 2 Councilors 61 District 3 Councilors 74 District 4 Councilors 82 District 5 Councilors 90 District 6 Councilors 98 ULAT SA BAYAN 2016 ng Punong Tagapangasiwa Hon. Ma. Josefina G. Belmonte Vice Mayor Presiding Officer Mga kagalang-galang na mga panauhin, mga kasama ko sa konseho, isang magandang hapon sa ating lahat. Sisimulan ko ang aking ulat sa pamamagitan ng isang larawan. Sa ating LED screen mapagmamasdan ninyo ang Gawad na ibinigay ng Department of Interior and Local Government at ng Philippine Councilors League sa ating Sanggunian Panlungsod, bilang National Winner ng 2015 Local Legislative Award sa kategoryang Highly Urbanized Cities at Independent Component Cities. There are 40 such cities in our country, and for the first time since this award was institutionalized, we the 19th City Council, have won it for our City. Three years ago in 2012, the 18th City Council was among the 13 finalists for this award, having won it in the National Capital Region. -
Department of Public Works and Highways (DPWH) Flood Fighting Activities and Disaster Response
11 92 153 205 63 72 Department of Public Works and 82 84 Highways 86 Strategic Infrastructure Programs and Policies 22 February 2019 DPWH Strategic Objective 11 92 DPWH Mandate: 153 The DPWH is mandated to undertake (a) the planning of infrastructure, such as national roads and bridges, flood control, 205 water resources projects and other public works, and (b) the 63 72 design, construction, and maintenance of national roads and bridges, and major flood control systems. 82 Condition of Philippine Road Network: 84 86 Out of the 32,933 kms total length of national roads as of December 2018, 96.02% or 31,623 km are already paved. Road Network Total (km) Paved (km) % Paved National Road 32,933 31,623 96.02 Primary 7,068 7,067 99.99 Secondary 14,285 13,770 96.40 Tertiary 11,580 10,786 93.14 Local Road 177,595 33,479 18.85 Page 1|50 Total 210,528 65,101 30.92 Out of the 8,339 national bridges, 99.5% or 8,296 national bridges are permanent. 2 DPWH Performance Governance System (PGS) Strategy Roadmap DPWH updated its Performance Governance System (PGS) Strategy Map and Enterprise Scorecard in line with the 11 92 Department’s commitment to realize Ambisyon Natin 2040, the long-term vision of a better life for the Filipino 153 family, translated into specific goals and milestones as supported by the 2017-2022 Philippine Development Plan. 205 63 72 82 84 86 Page 1|50 3 2011-2018 DPWH Total Budget 11 92 Amount in Billion Pesos 153 205 650.87 63 72 82 84 467.66 86 397.11 303.16 219.34 169.33 110.63 125.73 Page 1|50 2011 2012 2013 2014 2015 2016 2017