Chapter 2 Basic Concepts in
RF Design
1
Sections to be covered
• 2.1 General Considerations • 2.2 Effects of Nonlinearity
• 2.3 Noise • 2.4 Sensitivity and Dynamic Range • 2.5 Passive Impedance Transformation
2
Chapter Outline
Nonlinearity
Noise
Impedance
Transformation
Harmonic Distortion Compression Intermodulation
Noise Spectrum Device Noise Noise in Circuits
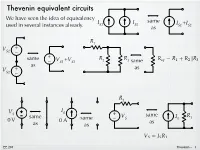
Series-Parallel
Conversion
Matching Networks
3
The Big Picture: Generic RF
Transceiver
Overall transceiver
Signals are upconverted/downconverted at TX/RX, by an oscillator controlled by a Frequency Synthesizer.
4
General Considerations: Units in RF Design
Voltage gain:
rms value
Power gain:
These two quantities are equal (in dB) only if the input and output
impedance are equal .
Example:
an amplifier having an input resistance of R0 (e.g., 50 Ω) and driving a load resistance of R0 :
5
where Vout and Vin are rms value.
General Considerations: Units in RF Design
“dBm”
The absolute signal levels are often expressed in dBm (not in watts or volts);
Used for power quantities, the unit dBm refers to “dB’s above
1mW”.
To express the signal power, Psig, in dBm, we write
6
Example of Units in RF
An amplifier senses a sinusoidal signal and delivers a power of 0 dBm to a load resistance of 50 Ω. Determine the peak-to-peak voltage swing across the load.
Solution:
a sinusoid signal having a peak-to-peak amplitude of Vpp
an rms value of Vpp/(2√2),
0dBm is equivalent to 1mW,
- where RL= 50 Ω
- thus,
7
Example of Units in RF
A GSM receiver senses a narrowband (modulated) signal having a level of -100 dBm. If the front-end amplifier provides a voltage gain of 15 dB, calculate the peak-to-peak voltage swing at the output of the amplifier.
Solution:
suppose the input and output impedance are equal. convert the received signal level to voltage:
-100 dBm
is 100 dB below 632 mVpp.
100 dB for voltage quantities is equivalent to 105.
-100 dBm is equivalent to 6.32 μVpp.
This input level is amplified by 15 dB (≈ 5.62),
The output swing is 35.5 μVpp.
Notice: For a narrowband (not sinusoid) 0-dBm signal, it is still possible to
8
approximate the (average) peak-to-peak swing as 632mV.
Voltage vs Power
Why the output voltage of the amplifier is of interest in this example?
– If the circuit following the amplifier does not present a 50-Ω input impedance, the power gain and voltage gain are not equal in dB.
– Mostly, the next stage may exhibit a purely capacitive input impedance, thereby requiring no signal “power”.
• one stage drives the gate of the transistor in the next stage.
9
dBm Used at Interfaces Without Power
Transfer
We use “dBm” at interfaces that do not necessarily entail power transfer.
(a) LNA driving a pure-capacitive impedance with a 632-mVpp swing, delivering no average power.
How about the power delivery?
Assumption: attaching an ideal voltage buffer to node X and drive a 50-Ω load.
the signal at node X has a level of 0 dBm, means that if this signal were applied to a 50-Ω load, then it would deliver 1 mW.
(b) Use of fictitious buffer to visualize the
signal level in “dBm”
10
voltage buffer
General Considerations: linearity
A system is linear if its output can be expressed as a linear combination
(superposition) of responses to individual inputs.
For arbitrary a and b, it holds that: Any system that does not satisfy this condition is nonlinear. Example:
nonzero initial conditions or dc offsets cause nonlinearity;
However, we often relax the rule ---------- accommodate these two effects.
11
Nonlinearity: Memoryless and Static System
Memoryless or static : if its output does not depend on the past values of its input;
Memoryless, linear
The input/output characteristic of a memoryless nonlinear system can be approximated with a polynomial
Memoryless, nonlinear
If the system is time variant,αj would be general functions of time.
12
Nonlinearity: Memoryless and Static System
Example of a memoryless nonlinear circuit:
If M1 operates in the saturation region and can be approximated as a square-law device [Lee]
1
ꢇ
ꢈ
2
ꢀꢁ = ꢂꢃꢄꢅꢆ
ꢉ − ꢉꢋꢌ
ꢊꢃ
2
then
Common-source stage
In this idealized case, the circuit displays only second-order nonlinearity.
13
Nonlinearity: Odd symmetry
A system has “odd symmetry” if y(t) is an odd function of x(t), i.e., if the response to –x(t) is the negative of that to x(t).
y(t) = α0 +α1x(t) +α2 x2 (t) +α3x3 (t) +
y(t) is odd symmetry if αj=0 for even j.
Such a system is sometimes called “balanced”, as exemplified by the differential pair shown in the next page.
14
Example of Polynomial Approximation
For square-law MOS transistors operating in saturation, the characteristic “differential pair circuit” can be expressed as
If the differential input is small, approximate the characteristic by a polynomial.
Assuming Approximation (Taylor Expansions) gives us:
- Differential pair
- Input/output characteristic
15
Example of Polynomial Approximation
Observations
The first term represents linear operation,
the small-signal voltage gain of the circuit (-gmRD);
Due to symmetry, even-order nonlinear terms are absent;
Notice: square-law devices yield a third-order characteristic in
this case.
16
General Considerations: Time Variance
A system is time-invariant if a time shift in its input results in the same time shift in its output.
If
y(t) = f [x(t)]
then
y(t-τ) = f [x(t-τ)]
- Time Variance
- Nonlinearity
Do not be confused by these two attributes.
17
Example of Time Variance
Plot the output waveform of the circuit in Fig. 1:
vin1 = A1 cos ω1t
vin2 = A2 cos(1.25ω1t )
Solution:
Fig.1
Switch: vout tracks vin2 if vin1 > 0 and is pulled down to zero by R1 if vin1 < 0. vout is equal to the product of vin2 and a square wave toggling between 0 and 1. This is an example of RF “mixers”.
18
A time shift in input does not result in the same time shift in output.
Time Variance: Generation of Other Frequency
Components
S(t) denotes a square wave toggling between 0 and 1 with a frequency of
f1=ω1/(2π)
The spectrum of square wave: a train of impulses whose amplitude follow a sinc envelop.
Illustration:
T1= 2π /ω1
Multiplication in time domain
Convolution in frequency domain
A linear system can generate frequency components that do not exist in t1h9e input signal when system is time variant.
Effects of nonlinearity
• ? Frequency • ? Amplitude • Harmonic distortion (谐波失真) • Gain compression (增益压缩) • Cross modulation (互调) • Intermodulation (交叉调制)
20
Notice
Analog and RF circuits can be approximated with a linear model for
small-signal operation.
In general, we have
memoryless time-variant systems with input/output characteristic :
y(t) ≈ α1x(t) +α2 x2 (t) +α3x3 (t)
α1 is considered as the small-signal gain.
The nonlinearity effects primarily arise from the third-order term α3.
21
Effects of nonlinearity
• Harmonic distortion (谐波失真) • Gain compression (增益压缩) • Cross modulation (互调) • Intermodulation (交叉调制)
22
Effects of Nonlinearity: Harmonic Distortion
If a sinusoid is applied to a nonlinear system: the output exhibits frequency components that are integer multiplies (“harmonics”) of the input frequency.
input:
output:
x(t) = Acosωt
y(t) ≈ α1x(t) +α2 x2 (t) +α3x3 (t)
- DC
- Fundamental
- Second
- Third
- Harmonic
- Harmonic
Arising from second-order nonlinearity
The term with the input frequency
23
Observations
y(t) ≈ α1x(t) +α2 x2 (t) +α3x3 (t)
Even-order harmonics result from αj with even j and vanish if the system has odd symmetry,
If mismatches corrupt the symmetry, what will happen?
The amplitude of the nth harmonic grows in proportion to?
n
A .
24
Example of Harmonic Distortion in Mixer
An analog multiplier “mixes” its two inputs, producing y(t) = kx1(t)x2(t), where k is a constant. Assume x1(t) = A1 cos ω1t and x2(t) = A2 cos ω2t. Question:
(a) If the mixer is ideal, determine the output frequency components.
Solution:
(a)
Analog multiplier
The output contains the sum and difference frequencies. These are “desired” components.
25
Example of Harmonic Distortion in Mixer
An analog multiplier “mixes” its two inputs below, producing y(t) = kx1(t)x2(t), where k is a constant. Assume x1(t) = A1 cos ω1t and x2(t) = A2 cos ω2t. (a)If the mixer is ideal, determine the output frequency components.
(b) If the input port sensing x2(t) suffers from third-order nonlinearity, determine the output frequency components.
Solution:
Third Harmonic of x2(t)
(b)
Analog multiplier
The mixers produces two “spurious” components at ω1+3ω2 and ω1-3ω2,
26
Cause other problems…
These are “undesired” components that are difficult to remove by filter.
Example of Harmonics on GSM Signal
The transmitter in a 900-MHz GSM cellphone delivers 1 W of power to the antenna. Explain the effect of the harmonics of this signal.
The second harmonic?
falls within another GSM cellphone band around 1800 MHz; Must be sufficiently small to impact the other users in that band.
The third, fourth, and fifth harmonics?
do not coincide with any popular bands; but must still remain below a certain level imposed by regulatory organizations in each country. (中国工信部无线电管理局/US FCC)
The sixth harmonic?
falls in the 5-GHz band used in wireless local area networks (WLANs).
fundamental
27
Effects of nonlinearity
• Harmonic distortion (谐波)
• Gain compression (增益压缩)
• Cross modulation (互调) • Intermodulation (交叉调制)
28
Gain Compression– Sign of α1, α3
y(t) α1x(t) +α2 x2 (t) +α3x3 (t)
≈
x(t) = Acosωt
The gain of fundamental component ω is equal to α1 + 3α3A2/4 varied as A becomes larger.
Compressive:
The term α3x3 “bends” the characteristic for sufficiently large x,
decreasing the gain as the input amplitude increases.
Expansive:
expanding the gain as the input amplitude increases
29
Most RF circuit of interest are compressive, we focus on this type.
Gain Compression: 1-dB Compression Point
With α1α3 <0, the fundamental gain is equal to α1 + 3α3A2/4 and falls as A rises.
1-dB compression point: defined as the input signal level that causes the small signal gain to drop by 1dB.
small signal gain large signal gain
Plotted on a log-log scale as a function of the input level
Output level, Aout, falls below its ideal value by 1 dB at the 1-dB compression point,
30
Ain,1dB
.