The Basics of Power the Background of Some of the Electronics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter 2 Basic Concepts in RF Design
Chapter 2 Basic Concepts in RF Design 1 Sections to be covered • 2.1 General Considerations • 2.2 Effects of Nonlinearity • 2.3 Noise • 2.4 Sensitivity and Dynamic Range • 2.5 Passive Impedance Transformation 2 Chapter Outline Nonlinearity Noise Impedance Harmonic Distortion Transformation Compression Noise Spectrum Intermodulation Device Noise Series-Parallel Noise in Circuits Conversion Matching Networks 3 The Big Picture: Generic RF Transceiver Overall transceiver Signals are upconverted/downconverted at TX/RX, by an oscillator controlled by a Frequency Synthesizer. 4 General Considerations: Units in RF Design Voltage gain: rms value Power gain: These two quantities are equal (in dB) only if the input and output impedance are equal. Example: an amplifier having an input resistance of R0 (e.g., 50 Ω) and driving a load resistance of R0 : 5 where Vout and Vin are rms value. General Considerations: Units in RF Design “dBm” The absolute signal levels are often expressed in dBm (not in watts or volts); Used for power quantities, the unit dBm refers to “dB’s above 1mW”. To express the signal power, Psig, in dBm, we write 6 Example of Units in RF An amplifier senses a sinusoidal signal and delivers a power of 0 dBm to a load resistance of 50 Ω. Determine the peak-to-peak voltage swing across the load. Solution: a sinusoid signal having a peak-to-peak amplitude of Vpp an rms value of Vpp/(2√2), 0dBm is equivalent to 1mW, where RL= 50 Ω thus, 7 Example of Units in RF A GSM receiver senses a narrowband (modulated) signal having a level of -100 dBm. -

Interstate Commerce Commission Washington
INTERSTATE COMMERCE COMMISSION WASHINGTON REPORT NO. 3374 PACIFIC ELECTRIC RAILWAY COMPANY IN BE ACCIDENT AT LOS ANGELES, CALIF., ON OCTOBER 10, 1950 - 2 - Report No. 3374 SUMMARY Date: October 10, 1950 Railroad: Pacific Electric Lo cation: Los Angeles, Calif. Kind of accident: Rear-end collision Trains involved; Freight Passenger Train numbers: Extra 1611 North 2113 Engine numbers: Electric locomo tive 1611 Consists: 2 muitiple-uelt 10 cars, caboose passenger cars Estimated speeds: 10 m. p h, Standing ft Operation: Timetable and operating rules Tracks: Four; tangent; ] percent descending grade northward Weather: Dense fog Time: 6:11 a. m. Casualties: 50 injured Cause: Failure properly to control speed of the following train in accordance with flagman's instructions - 3 - INTERSTATE COMMERCE COMMISSION REPORT NO, 3374 IN THE MATTER OF MAKING ACCIDENT INVESTIGATION REPORTS UNDER THE ACCIDENT REPORTS ACT OF MAY 6, 1910. PACIFIC ELECTRIC RAILWAY COMPANY January 5, 1951 Accident at Los Angeles, Calif., on October 10, 1950, caused by failure properly to control the speed of the following train in accordance with flagman's instructions. 1 REPORT OF THE COMMISSION PATTERSON, Commissioner: On October 10, 1950, there was a rear-end collision between a freight train and a passenger train on the Pacific Electric Railway at Los Angeles, Calif., which resulted in the injury of 48 passengers and 2 employees. This accident was investigated in conjunction with a representative of the Railroad Commission of the State of California. 1 Under authority of section 17 (2) of the Interstate Com merce Act the above-entitled proceeding was referred by the Commission to Commissioner Patterson for consideration and disposition. -

MARION NESTLE, Ph.D., M.P.H. March 2021 EDUCATION 1954-59
Department of Nutrition & Food Studies New York University Marion Nestle 411 Lafayette Street, 5th Floor Paulette Goddard Professor of Nutrition, Food Studies, and Public Health, Emerita New York, NY 10003-7035 P: 212 998 5595 [email protected] www.foodpolitics.com @marionnestle MARION NESTLE, Ph.D., M.P.H. March 2021 EDUCATION 1954-59 U. California Berkeley, Bacteriology, Phi Beta Kappa BA 1963-68 U. California Berkeley, Molecular Biology PhD 1985-86 U. California Berkeley, Public Health Nutrition MPH HONORARY DEGREES 2016 Doctor of Humane Letters, Macaulay Honors College, City University of New York 2012 Doctor of Science Honoris Causa, Transylvania University, Kentucky LICENSE New York State Certification in Nutrition and Dietetics, License #000007 PRIMARY APPOINTMENTS 1988- New York University, Steinhardt School Department of Nutrition and Food Studies & Public Health 2017 Paulette Goddard Professor, Emerita 2014- College of Global Public Health (Affiliated) 2006- Department of Sociology, Professor (Affiliated) 2004- Paulette Goddard Professor 2003-04 Professor and Director of Public Health Initiatives 1988-03 Professor and Chair 2006- Cornell University, College of Agriculture, Division of Nutritional Sciences (Affiliated) VISITING APPOINTMENTS 2019 University of California, Berkeley, Graduate School of Journalism (Spring) 2018 University of Gastronomic Sciences, Pollenzo, Italy, Visiting lecturer (Spring) 2017 Instituto Nacional de Salud Publica, Cuernavaca, Mexico, Fulbright Specialist (Spring) 2016 University of Sydney, Charles -

Current Source & Source Transformation Notes
EE301 – CURRENT SOURCES / SOURCE CONVERSION Learning Objectives a. Analyze a circuit consisting of a current source, voltage source and resistors b. Convert a current source and a resister into an equivalent circuit consisting of a voltage source and a resistor c. Evaluate a circuit that contains several current sources in parallel Ideal sources An ideal source is an active element that provides a specified voltage or current that is completely independent of other circuit elements. DC Voltage DC Current Source Source Constant Current Sources The voltage across the current source (Vs) is dependent on how other components are connected to it. Additionally, the current source voltage polarity does not have to follow the current source’s arrow! 1 Example: Determine VS in the circuit shown below. Solution: 2 Example: Determine VS in the circuit shown above, but with R2 replaced by a 6 k resistor. Solution: 1 8/31/2016 EE301 – CURRENT SOURCES / SOURCE CONVERSION 3 Example: Determine I1 and I2 in the circuit shown below. Solution: 4 Example: Determine I1 and VS in the circuit shown below. Solution: Practical voltage sources A real or practical source supplies its rated voltage when its terminals are not connected to a load (open- circuited) but its voltage drops off as the current it supplies increases. We can model a practical voltage source using an ideal source Vs in series with an internal resistance Rs. Practical current source A practical current source supplies its rated current when its terminals are short-circuited but its current drops off as the load resistance increases. We can model a practical current source using an ideal current source in parallel with an internal resistance Rs. -

Your Campus Tour
CALIFORNIA UNIVERSITY OF PENNSYLVANIA California University of Pennsylvania Office of Admissions SEEING 250 University Avenue IS California, PA 15 419 Phone: 1-888-412-0479 or 724-938-4404 Fax: 724-938-4564 www.calu.edu BELIEVING. E-mail: [email protected] Come take a look. Walk with us. Talk to us. IntEGrIty, CIvILIty, rESPOnSIBILIty Experience the world of possibilities that Cal U has to offer. Nearby accommodations CHOOSE If you’re planning on visiting the campus and need to spend the We’re a close-knit community, at home in more than night, there are quite a few affordable places to stay. THE WAY YOU 40 academic buildings, performance spaces and BELLE VERNON (I-70 Exit 43) residence halls, each one designed with teaching Hampton Inn: 724-929-8100 Holiday Inn Express: 724-930-0100 and learning in mind. BENTLEYVILLE (I-70 Exit 32B) We’re also an arboretum campus – a carefully CRUISE. Best Western Garden Inn: 724-239-4321 cataloged collection of more than 500 trees and Do you prefer a personal tour Holiday Inn Express: 724-239-7700 shrubs representing over 100 species, including a with a student guide who NEW STANTON (PA Turnpike Exit 75) sampling of nearly every tree indigenous to Econo Lodge: 724-925-6755 Pennsylvania. can share inside knowledge Super 8:* 724-925-8915 about buildings, programs and UNIONTOWN (Route 40) From the Quad to the Convocation Center, from the day-to-day life on campus? Fairfield Inn: 724-434-1800 Ceramics Labs to the Library, and from Old Main to Hampton Inn: 724-430-1000 Hamer Hall, you’ll find the comfort, character and Holiday Inn:* 724-437-2816 Contact us to register for a CAMPUS MAP & culture of Cal U is something to believe in. -
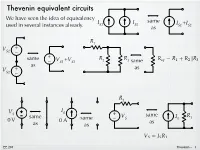
Thevenin Equivalent Circuits
Thevenin equivalent circuits We have seen the idea of equivalency same IS1 IS2 I +I used in several instances already. as S1 S2 R1 V + S1 – + same V +V R R = + – S1 S2 2 3 same as V + as S2 – R1 V IS S + V same R same same – S IS 1 0 V 0 A as as as = EE 201 Thevenin – 1 The behavior of any circuit, with respect to a pair of terminals (port) can be represented with a Thevenin equivalent, which consists of a voltage source in series with a resistor. load some two terminals some + R v circuit (two nodes) = circuit L RL port – RTh RTh load + + Thevenin + V V R v Th – equivalent Th – L RL – Need to determine VTh and RTh so that the model behaves just like the original. EE 201 Thevenin – 2 Norton equivalent load load some + + I v circuit vRL N RN RL – – Ideas developed independently (Thevenin in 1880’s and Norton in 1920’s). But we recognize the two forms as identical because they are source transformations of each other. In EE 201, we won’t make a distinction between the methods for finding Thevenin and Norton. Find one and we have the other. RTh = + V IN R Th – N = EE 201 Thevenin – 3 Example R 1.5 k! 1 RTh 1 k! V R I R R S + 2 S L V + L 9V – 3 k! 6 mA Th – 12 V Attach various load resistors to the R v i P original circuit. Do the same for 1 ! 11.99 mV 11.99 mA 0.144 mW the equivalent circuit. -

The Neighborly Substation the Neighborly Substation Electricity, Zoning, and Urban Design
MANHATTAN INSTITUTE CENTER FORTHE RETHINKING DEVELOPMENT NEIGHBORLY SUBstATION Hope Cohen 2008 er B ecem D THE NEIGHBORLY SUBstATION THE NEIGHBORLY SUBstATION Electricity, Zoning, and Urban Design Hope Cohen Deputy Director Center for Rethinking Development Manhattan Institute In 1879, the remarkable thing about Edison’s new lightbulb was that it didn’t burst into flames as soon as it was lit. That disposed of the first key problem of the electrical age: how to confine and tame electricity to the point where it could be usefully integrated into offices, homes, and every corner of daily life. Edison then designed and built six twenty-seven-ton, hundred-kilowatt “Jumbo” Engine-Driven Dynamos, deployed them in lower Manhattan, and the rest is history. “We will make electric light so cheap,” Edison promised, “that only the rich will be able to burn candles.” There was more taming to come first, however. An electrical fire caused by faulty wiring seriously FOREWORD damaged the library at one of Edison’s early installations—J. P. Morgan’s Madison Avenue brownstone. Fast-forward to the massive blackout of August 2003. Batteries and standby generators kicked in to keep trading alive on the New York Stock Exchange and the NASDAQ. But the Amex failed to open—it had backup generators for the trading-floor computers but depended on Consolidated Edison to cool them, so that they wouldn’t melt into puddles of silicon. Banks kept their ATM-control computers running at their central offices, but most of the ATMs themselves went dead. Cell-phone service deteriorated fast, because soaring call volumes quickly drained the cell- tower backup batteries. -

Boards, Commissions, and Committees
Boards, Commissions, and Committees Note: This is a listing of Federal boards, centers, commissions, councils, panels, study groups, task forces, etc., not listed elsewhere in the Manual, which were established by congressional or Presidential action, whose functions are not strictly limited to the internal operations of a parent department or agency, and which are authorized to publish documents in the Federal Register. While the editors have attempted to compile a complete and accurate listing, suggestions for improving coverage of this guide are welcome. Please address your comments to the Office of the Federal Register, National Archives and Records Administration, Washington, DC 20408. Phone, 202±523±5230. Federal advisory committees, as defined by the Federal Advisory Committee Act, as amended (5 U.S.C. app.), have not been included here. A complete listing of these committees can be found in the Twenty-third Annual Report of the President on Federal Advisory Committees for Fiscal Year 1994. For further information on Federal advisory committees and this report, contact the Committee Management Secretariat, General Services Administration, General Services Building (CAM), Room 7114, Washington, DC 20405. Phone, 202±273±3556. Administrative Committee of the Appalachian Regional Commission Federal Register 1666 Connecticut Avenue NW., National Archives, Washington, DC Washington, DC 20235. Phone, 202± 20408. Phone, 202±523±4534. 884±7799. Advisory Commission on Intergovernmental Relations Architectural and Transportation Barriers Compliance Board 1 800 K Street NW., Suite 450 South, Washington, DC 20575. Phone, 202± 1331 F Street NW., Suite 1000, 653±5540. Washington, DC 20004±1111. Phone, 202±272±5434. Advisory Council on Historic Preservation Arctic Research Commission 1100 Pennsylvania Avenue NW., Room 809, Washington, DC 20004. -

University Corridor 2013 Major Thoroughfare and Freeway Plan Amendment Request
UNIVERSITY CORRIDOR 2013 MAJOR THOROUGHFARE AND FREEWAY PLAN AMENDMENT REQUEST PLANNING COMMISSION WORKSHOP April, 2013 UNIVERSITY CORRIDOR Source: 2012 MTFP Map, City of Houston Planning and Development Department 1. REGIONAL LOCATION – The University Corridor Central Business District Uptown/ Greenway Texas Medical Center 2. AREA LOCATION – The University Corridor Uptown/ Houston Galleria Univ. of St. Community College Eastwood Greenway Thomas Transit Center Plaza Hillcroft Hillcroft Transit Center University of Texas Houston Southern University The University Corridor extends from Hillcroft Transit Center to Eastwood Transit Center for about 11.4 miles. Key activity centers include University of Houston, HCC, University of St. Thomas, Greenway Plaza, Uptown and Galleria. 3. THE UNIVERSITY CORRIDOR Wheeler S. Lockwood Cummins Richmond Dowling Alabama Westpark Hutchins Cleburne Elgin METRO’s MTFP Amendment Application requests that 1. Portions of Westpark, Richmond, Wheeler, Dowling, Alabama, Elgin and South Lockwood be re-classified as Transit Corridor Streets and that, 2. Portions of Cummins, Hutchins, and Cleburne be added as Transit Corridor Streets. 4. MTFP 2013 - METRO’S AMENDMENT REQUEST Eastwood Transit Center Hillcroft Hillcroft Transit Center Purpose : 1. To comply with the City of Houston’s Transit Corridor Ordinance; Record of Decision (ROD) for the University Corridor was issued by the FTA in July 2010. 2. To remain consistent with the other three light rail corridors under construction that have been designated as Transit Corridor Streets. 5. MTFP 2013 - METRO’S AMENDMENT REQUEST North Uptown East End Main Southeast Main Street, North, East End, Southeast and Uptown Corridors are Transit Corridors and were approved through a similar process of MTFP amendments. -

California Pacific Electric Company, Llc (U 933-E) Utility Supplier Diversity Program Report for Calendar Year 2011
CALIFORNIA PACIFIC ELECTRIC COMPANY, LLC (U 933-E) UTILITY SUPPLIER DIVERSITY PROGRAM REPORT FOR CALENDAR YEAR 2011 March 1, 2012 California Pacific Electric Company, LLC 1 2011 Annual Report - G.O. #156 California Pacific Electric Company, LLC 2011 Annual Report & 2012 Annual Plan TABLE OF CONTENTS G.O. #156 Page Description Section Number 2011 Annual Report Annual Report 3 Introduction and Executive Summary 3 1.1.1 Description of Program Activities – Internal & External 4 1.1.2 Utility Supplier Diversity Program Annual Results – Statistical Reports 5 1.1.3 Description of the Progress in Meeting or Exceeding Set Goals 8 1.1.4 List of Diverse Supplier Complaints 8 1.1.5 Description of Efforts to Recruit Diverse Suppliers in Low Utilization Categories 8 2012 Annual Plan 2.1.1 Short-Term, Mid-Term and Long-Term Goals 9 2.1.2 Description of Planned Program Activities – Internal & External 9 2.1.3 Plans for Recruiting Diverse Suppliers in Low Utilization Areas 9 2.1.4 Plans for Subcontracting 10 2.1.5 Plans for complying with the Utility Supplier Diversity Program Guidelines 10 California Pacific Electric Company, LLC 2 2011 Annual Report - G.O. #156 ANNUAL REPORT This filing, in compliance with the requirements of California Public Utilities Commission (CPUC) General Order 156 Sections 9 and 10 and Decision 88-04-057, as modified by Decision Nos. 88-09-024, 89-08- 041, 90-11-053, 90-12-027, 92-06-030, 95-12-045, 96-12-081, 98-11-030, 03-11-024, 05-12-023, 06-08- 031, includes the 2011 Annual Report and 2012 Annual Plan of California Pacific Electric Company, LLC’s (“CalPeco”)1 Supplier Diversity Program. -

IR Temperature Sensor
IR Temperature Sensor By Kika Arias & Elaine Ng MIT 6.101 Final Project Spring 2020 1 Introduction (Kika) The goal of our project is to build an infrared thermometer which is a device that is used to measure the emitted energy from the surface of an object. IR thermometers are used in medical, industrial and home settings for a wide variety of applications. Many electronics retailers sell IR thermometer sensors that perform all of the processing to produce a temperature reading. We wanted to dissect this “black box” to understand how waves of energy can become a human readable temperature. We learned that IR thermometers consist of three basic stages. A sensing stage, in which IR radiation is converted to an electrical signal, a signal conditioning stage, where filtering, amplification, and linearization are performed, and a digital output stage, where the analog signal is converted into a digital one. Our project replicates these basic stages to create a simulated IR temperature sensor. System Overview (Kika) Fig 1. System Block Diagram. Thermopile signal processing in red, and temperature calculation and digital output in purple. As mentioned in the previous section, an IR thermometer consists of three basic stages: sensing, signal conditioning, and digital output. Figure 1 shows our system block diagram with the sensing and signal conditioning stages shown in red, and the digital output and additional processing shown in purple. The sensing stage of our project uses a thermopile sensor which has a negative temperature coefficient (NTC) thermistor for temperature compensation. The thermopile sensor absorbs infrared radiation and converts the IR to a small voltage (typically on the order of μVs). -

AUGUST 23, 2019 Shows a Map of the Corridor and Study Area, Which Includes One-Half Mile to Either Side of Verm�:Mt Avenue
AUGUST 23, 2019 shows a map of the corridor and study area, which includes one-half mile to either side of Verm�:mt Avenue. The three potential.rail concepts include: 1) Light Rail Transit (LRT), 2) Heavy Rail Transit (HRT) with a direct connection to the Red Line; and 3) HRT with stand-alone operation (beginning/ending at Vermont/Wilshire). Because the cost of each rail alternative far exceeds the Measure M funding, staffinitially recommended advancing three BRT alternatives into environmental review. However, the April Board motion directed staffto also advance the three rail concepts into environmental review to preserve the ability to deliver rail transit should additional funding materialize. The motion also directed staff to include a feasibility study of extending the Vermont Transit Corridor to the South Bay Silver Line Pacific Coast Highway (PCH) transitway station to ensure regional connectivity. Environmental Review and South Bay Feasibility Study In order to address the April 25, 2019 Board motion, staffis developing separate procurement documents to conduct two parallel studies. Given the importance of the Vermont Transit Corridor and desire to meet the Measure M opening date, staff will proceed with advancing the three BRT and three rail alternatives between Hollywood Boulevard and 120th Street into environmental review. This effortis anticipated to take approximately 24 months from contract award through completion of the Environmental Impact Report (EIR). The six alternatives being studied in the EIR include: 1) End-to-end side-running BRT 2) Combination side- and center-running BRT 3) End-to-end center-running BRT (including possible grade separation) 4) LRT 5) HRT with direct connection to Red Line 6) HRT stand-alone service (beginning/ending at Vermont/Wilshire) The second study assesses the feasibility of extending the BRT and rail alternatives 10 miles from 120th Street to the South Bay Silver Line PCH transitwaystation.