Exploring Multistability in Prismatic Metamaterials Through Local Actuation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -
Parental Testing in Graph Theory?
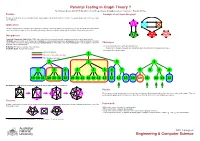
Parental Testing in Graph Theory ? By S Narjess Afzaly,∗ ANU CSIT Algorithm & Data Group, [email protected]. Supervisor: Brendan McKay.∗ Problem A sample of an irreducible graph To make a complete list of non-isomorphic simple quartic graphs with the given number of vertices. In a quartic graph, each vertex has exactly four neighbours. Applications Finding counterexamples, verifying some conjectures or refining some proofs whether in graph theory or in any other field where the problem can be modelled as a graph such as: chemistry, web mining, national security, the railway map, the electrical circuit and neural science. Our approach Canonical Construction Path (McKay 1998): A general method to recursively generate combinatorial objects in which larger objects, (Children), are constructed out of smaller ones, (Parents), by some well-defined operation, (extension), and avoiding constructing isomorphic copies at each construction step by defining a unique genuine parent for each graph. Hence a generated graph is only accepted if it has been Challenges extended from its genuine parent. • To avoid isomorphic copies when generating the list: Reduction: The inverse operation of the extension. Irreducible graph: A graph with no parent. The definition of the genuine parent can substantially affect the efficiency of the generation process. • Generating all irreducible graphs. Genuine parent 1 Has an isomorphic sibling Not genuine parent 2 2 3 4 5 5 6 5 5 6 6 7 5 8 9 6 10 10 11 10 10 11 12 10 10 11 10 10 11 12 12 12 13 10 10 11 10 13 12 Our Reduction: Deleting a vertex and adding two extra disjoint edges between its neighbours. -

Fast Generation of Planar Graphs (Expanded Version)
Fast generation of planar graphs (expanded version) Gunnar Brinkmann∗ Brendan D. McKay† Department of Applied Mathematics Department of Computer Science and Computer Science Australian National University Ghent University Canberra ACT 0200, Australia B-9000 Ghent, Belgium [email protected] [email protected] Abstract The program plantri is the fastest isomorph-free generator of many classes of planar graphs, including triangulations, quadrangulations, and convex polytopes. Many applications in the natural sciences as well as in mathematics have appeared. This paper describes plantri’s principles of operation, the basis for its efficiency, and the recursive algorithms behind many of its capabilities. In addition, we give many counts of isomorphism classes of planar graphs compiled using plantri. These include triangulations, quadrangulations, convex polytopes, several classes of cubic and quartic graphs, and triangulations of disks. This paper is an expanded version of the paper “Fast generation of planar graphs” to appeared in MATCH. The difference is that this version has substantially more tables. 1 Introduction The program plantri can rapidly generate many classes of graphs embedded in the plane. Since it was first made available, plantri has been used as a tool for research of many types. We give only a partial list, beginning with masters theses [37, 40] and PhD theses [32, 42]. Applications have appeared in chemistry [8, 21, 28, 39, 44], in crystallography [19], in physics [25], and in various areas of mathematics [1, 2, 7, 20, 22, 24, 41]. ∗Research supported in part by the Australian National University. †Research supported by the Australian Research Council. 1 The purpose of this paper is to describe the facilities of plantri and to explain in general terms the method of operation. -

Are Your Polyhedra the Same As My Polyhedra?
Are Your Polyhedra the Same as My Polyhedra? Branko Gr¨unbaum 1 Introduction “Polyhedron” means different things to different people. There is very little in common between the meaning of the word in topology and in geometry. But even if we confine attention to geometry of the 3-dimensional Euclidean space – as we shall do from now on – “polyhedron” can mean either a solid (as in “Platonic solids”, convex polyhedron, and other contexts), or a surface (such as the polyhedral models constructed from cardboard using “nets”, which were introduced by Albrecht D¨urer [17] in 1525, or, in a more mod- ern version, by Aleksandrov [1]), or the 1-dimensional complex consisting of points (“vertices”) and line-segments (“edges”) organized in a suitable way into polygons (“faces”) subject to certain restrictions (“skeletal polyhedra”, diagrams of which have been presented first by Luca Pacioli [44] in 1498 and attributed to Leonardo da Vinci). The last alternative is the least usual one – but it is close to what seems to be the most useful approach to the theory of general polyhedra. Indeed, it does not restrict faces to be planar, and it makes possible to retrieve the other characterizations in circumstances in which they reasonably apply: If the faces of a “surface” polyhedron are sim- ple polygons, in most cases the polyhedron is unambiguously determined by the boundary circuits of the faces. And if the polyhedron itself is without selfintersections, then the “solid” can be found from the faces. These reasons, as well as some others, seem to warrant the choice of our approach. -

An Enduring Error
Version June 5, 2008 Branko Grünbaum: An enduring error 1. Introduction. Mathematical truths are immutable, but mathematicians do make errors, especially when carrying out non-trivial enumerations. Some of the errors are "innocent" –– plain mis- takes that get corrected as soon as an independent enumeration is carried out. For example, Daublebsky [14] in 1895 found that there are precisely 228 types of configurations (123), that is, collections of 12 lines and 12 points, each incident with three of the others. In fact, as found by Gropp [19] in 1990, the correct number is 229. Another example is provided by the enumeration of the uniform tilings of the 3-dimensional space by Andreini [1] in 1905; he claimed that there are precisely 25 types. However, as shown [20] in 1994, the correct num- ber is 28. Andreini listed some tilings that should not have been included, and missed several others –– but again, these are simple errors easily corrected. Much more insidious are errors that arise by replacing enumeration of one kind of ob- ject by enumeration of some other objects –– only to disregard the logical and mathematical distinctions between the two enumerations. It is surprising how errors of this type escape detection for a long time, even though there is frequent mention of the results. One example is provided by the enumeration of 4-dimensional simple polytopes with 8 facets, by Brückner [7] in 1909. He replaces this enumeration by that of 3-dimensional "diagrams" that he inter- preted as Schlegel diagrams of convex 4-polytopes, and claimed that the enumeration of these objects is equivalent to that of the polytopes. -

Smallest Cubic and Quartic Graphs with a Given Number of Cutpoints and Bridges Gary Chartrand
Old Dominion University ODU Digital Commons Mathematics & Statistics Faculty Publications Mathematics & Statistics 1982 Smallest Cubic and Quartic Graphs With a Given Number of Cutpoints and Bridges Gary Chartrand Farrokh Saba John K. Cooper Jr. Frank Harary Curtiss E. Wall Old Dominion University Follow this and additional works at: https://digitalcommons.odu.edu/mathstat_fac_pubs Part of the Mathematics Commons Repository Citation Chartrand, Gary; Saba, Farrokh; Cooper, John K. Jr.; Harary, Frank; and Wall, Curtiss E., "Smallest Cubic and Quartic Graphs With a Given Number of Cutpoints and Bridges" (1982). Mathematics & Statistics Faculty Publications. 76. https://digitalcommons.odu.edu/mathstat_fac_pubs/76 Original Publication Citation Chartrand, G., Saba, F., Cooper, J. K., Harary, F., & Wall, C. E. (1982). Smallest cubic and quartic graphs with a given number of cutpoints and bridges. International Journal of Mathematics and Mathematical Sciences, 5(1), 41-48. doi:10.1155/s0161171282000052 This Article is brought to you for free and open access by the Mathematics & Statistics at ODU Digital Commons. It has been accepted for inclusion in Mathematics & Statistics Faculty Publications by an authorized administrator of ODU Digital Commons. For more information, please contact [email protected]. I nternat. J. Math. & Math. Sci. Vol. 5 No. (1982)41-48 41 SMALLEST CUBIC AND QUARTIC GRAPHS WITH A GIVEN NUMBER OF CUTPOINTS AND BRIDGES GARY CHARTRAND and FARROKH SABA Department of Mathematics, Western Michigan University Kalamazoo, Michigan 49008 U. S .A. JOHN K. COOPER, JR. Department of Mathematics, Eastern Michigan University Ypsilanti, Michigan 48197 U.S.A. FRANK HARARY Department of Mathematics, University of Michigan Ann Arbor, Michigan 48104 U.S.A. -

Distance-Two Colorings of Barnette Graphs
CCCG 2018, Winnipeg, Canada, August 8{10, 2018 Distance-Two Colorings of Barnette Graphs Tom´asFeder∗ Pavol Helly Carlos Subiz Abstract that the conjectures hold on the intersection of the two classes, i.e., that tri-connected cubic planar graphs with Barnette identified two interesting classes of cubic poly- all face sizes 4 or 6 are Hamiltonian. When all faces hedral graphs for which he conjectured the existence of have sizes 5 or 6, this was a longstanding open prob- a Hamiltonian cycle. Goodey proved the conjecture for lem, especially since these graphs (tri-connected cubic the intersection of the two classes. We examine these planar graphs with all face sizes 5 or 6) are the popu- classes from the point of view of distance-two color- lar fullerene graphs [8]. The second conjecture has now ings. A distance-two r-coloring of a graph G is an as- been affirmatively resolved in full [18]. For the first con- signment of r colors to the vertices of G so that any jecture, two of the present authors have shown in [10] two vertices at distance at most two have different col- that if the conjecture is false, then the Hamiltonicity ors. Note that a cubic graph needs at least four colors. problem for tri-connected cubic planar graphs is NP- The distance-two four-coloring problem for cubic planar complete. In view of these results and conjectures, in graphs is known to be NP-complete. We claim the prob- this paper we call bipartite tri-connected cubic planar lem remains NP-complete for tri-connected bipartite graphs type-one Barnette graphs; we call cubic plane cubic planar graphs, which we call type-one Barnette graphs with all face sizes 3; 4; 5 or 6 type-two Barnette graphs, since they are the first class identified by Bar- graphs; and finally we call cubic plane graphs with all nette. -

Dissection of Rhombic Solids with Octahedral Symmetry to Archimedean Solids, Part 2
Dissection of rhombic solids with octahedral symmetry to Archimedean solids, Part 2 Izidor Hafner In [5] we found "best approximate" by "rhombic solids" for certain Platonic and Archimedean solids with octahedral symmetry. In this paper we treat the remaining solids: truncated cube, rhombicubocahedron and truncated cuboctahedron. For this purpose we extend the notion of rhombic solid so, that it is also possible to add to them 1/4 and 1/8 of the rhombic dodecahedron and 1/6 of the cube. These last solids can be dissected to cubes. The authors of [1, pg. 331] produced the table of the Dehn invariants for the non-snub unit edge Archimedean polyhedra. We have considered the icosahedral part in [7]. Results from both papers show, that each best aproximate has a surplus or a deficit measured in tetrahedrons (T): -2, -1, 0, 1, 2. Actualy 1/4 of the tetrahedron appears as a piece. The table of Dehn invariant for the non-snub unit edge Archimedean polyhedra (octahedral part) [1]: Tetrahedron -12(3)2 Truncated tetrahedron 12(3)2 Cube 0 Truncated cube -24(3)2 Octahedron 24(3)2 Truncated octahedron 0 Rhombicuboctahedron -24(3)2 ??? Cuboctahedron -24(3)2 Truncated cuboctahedron 0 Along with the above table, we produced the following one: Tetrahedron 1 Truncated tetrahedron -1 Cube 0 Truncated cube 2 Octahedron -2 Truncated octahedron 0 Rhombicuboctahedron -2 Cuboctahedron 2 Truncated cuboctahedron 0 For instance: the tetrahedron has a surplus of 1 tetrahedron relative to empty polyhedron, the octahedron has deficit of 2 tetrahedra relative to rhombic dodecahedron. Our truncated cube, rhombicuboctahedron and truncated cuboctahedron are not Archimedean, but can be enlarged to Archimedean by addition of some prisms, so the results in the table are valid for Archimedean solids as well. -

Energy Landscapes for the Self-Assembly of Supramolecular Polyhedra
JNonlinearSci DOI 10.1007/s00332-016-9286-9 Energy Landscapes for the Self-Assembly of Supramolecular Polyhedra Emily R. Russell1 Govind Menon2 · Received: 16 June 2015 / Accepted: 23 January 2016 ©SpringerScience+BusinessMediaNewYork2016 Abstract We develop a mathematical model for the energy landscape of polyhedral supramolecular cages recently synthesized by self-assembly (Sun et al. in Science 328:1144–1147, 2010). Our model includes two essential features of the experiment: (1) geometry of the organic ligands and metallic ions; and (2) combinatorics. The molecular geometry is used to introduce an energy that favors square-planar vertices 2 (modeling Pd + ions) and bent edges with one of two preferred opening angles (model- ing boomerang-shaped ligands of two types). The combinatorics of the model involve two-colorings of edges of polyhedra with four-valent vertices. The set of such two- colorings, quotiented by the octahedral symmetry group, has a natural graph structure and is called the combinatorial configuration space. The energy landscape of our model is the energy of each state in the combinatorial configuration space. The challenge in the computation of the energy landscape is a combinatorial explosion in the number of two-colorings of edges. We describe sampling methods based on the symmetries Communicated by Robert V. Kohn. ERR acknowledges the support and hospitality of the Institute for Computational and Experimental Research in Mathematics (ICERM) at Brown University, where she was a postdoctoral fellow while carrying out this work. GM acknowledges partial support from NSF grant DMS 14-11278. This research was conducted using computational resources at the Center for Computation and Visualization, Brown University. -

Local Symmetry Preserving Operations on Polyhedra
Local Symmetry Preserving Operations on Polyhedra Pieter Goetschalckx Submitted to the Faculty of Sciences of Ghent University in fulfilment of the requirements for the degree of Doctor of Science: Mathematics. Supervisors prof. dr. dr. Kris Coolsaet dr. Nico Van Cleemput Chair prof. dr. Marnix Van Daele Examination Board prof. dr. Tomaž Pisanski prof. dr. Jan De Beule prof. dr. Tom De Medts dr. Carol T. Zamfirescu dr. Jan Goedgebeur © 2020 Pieter Goetschalckx Department of Applied Mathematics, Computer Science and Statistics Faculty of Sciences, Ghent University This work is licensed under a “CC BY 4.0” licence. https://creativecommons.org/licenses/by/4.0/deed.en In memory of John Horton Conway (1937–2020) Contents Acknowledgements 9 Dutch summary 13 Summary 17 List of publications 21 1 A brief history of operations on polyhedra 23 1 Platonic, Archimedean and Catalan solids . 23 2 Conway polyhedron notation . 31 3 The Goldberg-Coxeter construction . 32 3.1 Goldberg ....................... 32 3.2 Buckminster Fuller . 37 3.3 Caspar and Klug ................... 40 3.4 Coxeter ........................ 44 4 Other approaches ....................... 45 References ............................... 46 2 Embedded graphs, tilings and polyhedra 49 1 Combinatorial graphs .................... 49 2 Embedded graphs ....................... 51 3 Symmetry and isomorphisms . 55 4 Tilings .............................. 57 5 Polyhedra ............................ 59 6 Chamber systems ....................... 60 7 Connectivity .......................... 62 References -

Quartic Planar Graphs
Quartic planar graphs Jane Tan October 2018 A thesis submitted for the degree of Bachelor of Philosophy (Honours) of the Australian National University Declaration The work in this thesis is my own except where otherwise stated. Jane Tan Acknowledgements First, I'd like to thank my supervisors, Brendan McKay and Scott Morrison. Brendan { your guidance has been invaluable. I'm so grateful for all of the exciting problems you've introduced me to, and that you're still putting up with me a full two years after you agreed to take me on \just for one semester". And Scott { thank you for your help with editing, your calming presence, and for sharing the good chalk. I would also like to thank all of the lecturers at the MSI who have been so generous with their time and from whom I have learnt so much. Special thanks to Vigleik, Joan and Andrew for teaching fantastic reading courses and supervising me in projects over the years. Thanks also go to all of the honours students, even the cookie monster and the elusive north-siders. It's been great fun sharing our shiny new office! Last but not least, thank you to my family for always being on the phone. v Abstract In this thesis, we explore three problems concerning quartic planar graphs. The first is on recursive structures; we prove generation theorems for several interest- ing subclasses of quartic planar graphs and their duals, building on previous work which has largely been focussed on the simple or nonplanar cases. The second problem is on the existence of locally self-avoiding Eulerian circuits. -

G-Graphs: a New Representation of Groups
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Journal of Symbolic Computation 42 (2007) 549–560 www.elsevier.com/locate/jsc G-graphs: A new representation of groups Alain Brettoa,∗, Alain Faisantb, Luc Gilliberta a Universite´ de Caen, GREYC CNRS UMR-6072. Campus 2, Bd Marechal Juin BP 5186, 14032 Caen cedex, France b Universite´ Jean Monnet LARAL 23 rue Paul Michelon, 42023 Saint-Etienne cedex 2, France Received 31 October 2004; accepted 8 August 2006 Available online 5 March 2007 Abstract An important part of computer science is focused on the links that can be established between group theory and graph theory and graphs. CAYLEY graphs, that establish such a link, are useful in a lot of areas of sciences. This paper introduces a new type of graph associated with a group, the G-graphs, and presents many of their properties. We show that various characteristics of a group can be seen on its associated G-graph. We also present an implementation of the algorithm constructing these new graphs, an implementation that will lead to some experimental results. Finally we show that many classical graphs are G-graphs. The relations between G-graphs and CAYLEY graphs are also studied. c 2007 Elsevier Ltd. All rights reserved. Keywords: Computational group theory; Graph representation of a group; Cayley graphs; G-graphs 1. Introduction Group theory can be considered as the study of symmetry. A group is basically the collection of symmetries of some object preserving some of its structure; therefore many sciences have to deal with groups.