G-Graphs: a New Representation of Groups
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Configurations of Points and Lines
Configurations of Points and Lines "RANKO'RüNBAUM 'RADUATE3TUDIES IN-ATHEMATICS 6OLUME !MERICAN-ATHEMATICAL3OCIETY http://dx.doi.org/10.1090/gsm/103 Configurations of Points and Lines Configurations of Points and Lines Branko Grünbaum Graduate Studies in Mathematics Volume 103 American Mathematical Society Providence, Rhode Island Editorial Board David Cox (Chair) Steven G. Krantz Rafe Mazzeo Martin Scharlemann 2000 Mathematics Subject Classification. Primary 01A55, 01A60, 05–03, 05B30, 05C62, 51–03, 51A20, 51A45, 51E30, 52C30. For additional information and updates on this book, visit www.ams.org/bookpages/gsm-103 Library of Congress Cataloging-in-Publication Data Gr¨unbaum, Branko. Configurations of points and lines / Branko Gr¨unbaum. p. cm. — (Graduate studies in mathematics ; v. 103) Includes bibliographical references and index. ISBN 978-0-8218-4308-6 (alk. paper) 1. Configurations. I. Title. QA607.G875 2009 516.15—dc22 2009000303 Copying and reprinting. Individual readers of this publication, and nonprofit libraries acting for them, are permitted to make fair use of the material, such as to copy a chapter for use in teaching or research. Permission is granted to quote brief passages from this publication in reviews, provided the customary acknowledgment of the source is given. Republication, systematic copying, or multiple reproduction of any material in this publication is permitted only under license from the American Mathematical Society. Requests for such permission should be addressed to the Acquisitions Department, American Mathematical Society, 201 Charles Street, Providence, Rhode Island 02904-2294, USA. Requests can also be made by e-mail to [email protected]. c 2009 by the American Mathematical Society. -

Graph Theory with Applications
GRAPH THEORY WITH APPLICATIONS J. A. Bondy and U. S. R. Murty Department of Combina tories and Optimization, University of Waterloo, Ontario, Canada NORfH-HOLLAND New York • Amsterdam • Oxford @J.A. Bondy and U.S.R. Muny 1976 First published in Great Britain 1976 by The Macmillan Press Ltd. First published in the U.S.A. 1976 by Elsevier Science Publishing Co., Inc. 52 Vanderbilt Avenue, New York, N.Y. 10017 Fifth Printing, 1982. Sole Distributor in the U.S.A: Elsevier Science Publishing Co., Inc. Library of Congress Cataloging in Publication Data Bondy, John Adrian. Graph theory with applications. Bibliography: p. lncludes index. 1. Graph theory. 1. Murty, U.S.R., joint author. II. Title. QA166.B67 1979 511 '.5 75-29826 ISBN 0.:444-19451-7 AU rights reserved. No part of this publication may be reproduced or transmitted, in any form or by any means, without permission. Printed in the United States of America To our parents Preface This book is intended as an introduction to graph theory. Our aim bas been to present what we consider to be the basic material, together with a wide variety of applications, both to other branches of mathematics and to real-world problems. Included are simple new proofs of theorems of Brooks, Chvâtal, Tutte and Vizing. The applications have been carefully selected, and are treated in some depth. We have chosen to omit ail so-called 'applications' that employ just the language of graphs and no theory. The applications appearing at the end of each chapter actually make use of theory developed earlier in the same chapter. -

XYZ Decompositions of Graphs Dagstuhl Seminar 08191
XYZ decom- positions V. Batagelj XYZ decompositions of graphs Dagstuhl Seminar 08191 Motivation XYZ decom- Vladimir Batagelj positions Results University of Ljubljana, FMF, Dept. of Mathematics; and References IMFM Ljubljana, Dept. of Theoretical Computer Science joint work with Franz J. Brandenburg, Walter Didimo, Giuseppe Liotta, Maurizio Patrignani 23rd Leoben-Ljubljana Graph Theory Seminar Ljubljana, 14-15. November 2008 V. Batagelj XYZ decompositions Outline XYZ decom- positions V. Batagelj Dagstuhl Seminar 08191 Motivation 1 XYZ decom- Dagstuhl Seminar 08191 positions 2 Motivation Results 3 XYZ decompositions References 4 Results 5 References V. Batagelj XYZ decompositions Dagstuhl Seminar 08191 XYZ decom- positions V. Batagelj Dagstuhl Seminar 08191 Motivation XYZ decom- positions Results References Dagstuhl Seminar 08191: Graph Drawing with Applications to Bioinformatics and Social Sciences. Dagstuhl, May 4-9, 2008 V. Batagelj XYZ decompositions Motivation XYZ decom- positions For dense graphs the matrix representation is better [3]. Pajek - shadow [0.00,1.00] V. Batagelj uki fra wge jap net ita usa bel lux car swe kod den swi can nor par spa irn Dagstuhl yem mat irq pak ire nau aut bol hun Seminar 08191 lib hai isr nic sau alb kuw aus gua mon fin por zai hon bra arg pol syr cze kmr usr Motivation tri ege yug sri ind cha saf gre tur sie egy bul rum uru tai rum syr XYZ decom- leb upv cyp vnr ice arg tun gab cub liy positions pol mor usr lux alg spanor nig isr mli uga ins bul liy ken mex usa eth brm pan net tha cze fra jor sud gre -
Parental Testing in Graph Theory?
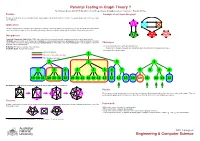
Parental Testing in Graph Theory ? By S Narjess Afzaly,∗ ANU CSIT Algorithm & Data Group, [email protected]. Supervisor: Brendan McKay.∗ Problem A sample of an irreducible graph To make a complete list of non-isomorphic simple quartic graphs with the given number of vertices. In a quartic graph, each vertex has exactly four neighbours. Applications Finding counterexamples, verifying some conjectures or refining some proofs whether in graph theory or in any other field where the problem can be modelled as a graph such as: chemistry, web mining, national security, the railway map, the electrical circuit and neural science. Our approach Canonical Construction Path (McKay 1998): A general method to recursively generate combinatorial objects in which larger objects, (Children), are constructed out of smaller ones, (Parents), by some well-defined operation, (extension), and avoiding constructing isomorphic copies at each construction step by defining a unique genuine parent for each graph. Hence a generated graph is only accepted if it has been Challenges extended from its genuine parent. • To avoid isomorphic copies when generating the list: Reduction: The inverse operation of the extension. Irreducible graph: A graph with no parent. The definition of the genuine parent can substantially affect the efficiency of the generation process. • Generating all irreducible graphs. Genuine parent 1 Has an isomorphic sibling Not genuine parent 2 2 3 4 5 5 6 5 5 6 6 7 5 8 9 6 10 10 11 10 10 11 12 10 10 11 10 10 11 12 12 12 13 10 10 11 10 13 12 Our Reduction: Deleting a vertex and adding two extra disjoint edges between its neighbours. -

Semisymmetric Graphs from Polytopes
Semisymmetric Graphs from Polytopes Barry Monson¤ University of New Brunswick Fredericton, New Brunswick, Canada E3B 5A3 ([email protected]) Toma·z Pisanskiy University of Ljubljana, FMF Jadranska 19, Ljubljana 1111, Slovenia; and Faculty of Education, University of Primorska, Cankarjeva 5, Koper 6000, Slovenia ([email protected]) Egon Schultez Northeastern University Boston MA 02115, USA ([email protected]) Asia Ivi¶c Weissx York University Toronto, Ontario, Canada M3J 1P3 ([email protected]) Abstract Every ¯nite, self-dual, regular (or chiral) 4-polytope of type f3;q;3g has a trivalent 3-transitive (or 2-transitive) medial layer graph. Here, by drop- ping self-duality, we obtain a construction for semisymmetric trivalent graphs (which are edge- but not vertex-transitive). In particular, the Gray graph arises as the medial layer graph of a certain universal locally toroidal regular 4-polytope. Key Words: semisymmetric graphs, abstract regular and chiral polytopes. AMS Subject Classi¯cation (1991): Primary: 05C25. Secondary: 51M20. ¤Supported by the NSERC of Canada, grant 4818 ySupported by Ministry of Higher Education, Science and Technolgy of Slovenia grants P1-0294,J1-6062,L1-7230. zSupported by NSA-grant H98230-05-1-0027 xSupported by the NSERC of Canada, grant 8857 1 1 Introduction The theory of symmetric trivalent graphs and the theory of regular polytopes are each abundant sources of beautiful mathematical ideas. In [22], two of the authors established some general and unexpected connections between the two subjects, building upon a rich variety of examples appearing in the literature (see [4], [7], [10], [11], [28] and [29]). Here we develop these connections a little further, with speci¯c focus on semisymmetric graphs. -

Fast Generation of Planar Graphs (Expanded Version)
Fast generation of planar graphs (expanded version) Gunnar Brinkmann∗ Brendan D. McKay† Department of Applied Mathematics Department of Computer Science and Computer Science Australian National University Ghent University Canberra ACT 0200, Australia B-9000 Ghent, Belgium [email protected] [email protected] Abstract The program plantri is the fastest isomorph-free generator of many classes of planar graphs, including triangulations, quadrangulations, and convex polytopes. Many applications in the natural sciences as well as in mathematics have appeared. This paper describes plantri’s principles of operation, the basis for its efficiency, and the recursive algorithms behind many of its capabilities. In addition, we give many counts of isomorphism classes of planar graphs compiled using plantri. These include triangulations, quadrangulations, convex polytopes, several classes of cubic and quartic graphs, and triangulations of disks. This paper is an expanded version of the paper “Fast generation of planar graphs” to appeared in MATCH. The difference is that this version has substantially more tables. 1 Introduction The program plantri can rapidly generate many classes of graphs embedded in the plane. Since it was first made available, plantri has been used as a tool for research of many types. We give only a partial list, beginning with masters theses [37, 40] and PhD theses [32, 42]. Applications have appeared in chemistry [8, 21, 28, 39, 44], in crystallography [19], in physics [25], and in various areas of mathematics [1, 2, 7, 20, 22, 24, 41]. ∗Research supported in part by the Australian National University. †Research supported by the Australian Research Council. 1 The purpose of this paper is to describe the facilities of plantri and to explain in general terms the method of operation. -

LEOBEN-LJUBLJANA GRAPH THEORY SEMINAR 2016 Dedicated to Norbert Seifter's 60Th Birthday Special Session on the Occasion Of
LEOBEN-LJUBLJANA GRAPH THEORY SEMINAR 2016 Dedicated to Norbert Seifter's 60th Birthday Special session on the occasion of Bojan Mohar's 60th Birthday 25th - 28th September 2016, Judenburg, Austria Supported by TU Graz, MU Leoben, Austrian Science Fund, Austrian Mathematical Society and the Town of Judenburg. Titles and abstracts Vladimir Batagelj (Ljubljana - Koper): Widespread index Abstract. On January 12, 2016 Clement Levallois posted at SocNet a message asking for a measure of how widespread is the distribution of a node attribute in a network. In the paper we propose and study two indices for measuring the widespread of a node attribute value in a network: the (simple) widespread index and the domination index. A com- putation of the proposed indices using the program Pajek is illustrated on two networks: the Class network and the US Airports network. Chris Godsil (Waterloo): Graph isomorphism and quantum walks Abstract. It has been suggested that graph isomorphism may be one of the problems that can be solved faster on a quantum computer than on a clasical computer. Conse- quently physicists have devoted some effort to find algorithms for graph isomorphism. I will report on work undertaken by me and my colleagues, using tools from graph spec- tral theory and finite geometry, to show that the algorithms proposed to date do not work. Veronica Hern´andezMartinez (Madrid): On the diameter, minimum and maximum degree and hyperbolicity constant Abstract. In this work, we obtain good upper bounds for the diameter of any graph in terms of its minimum degree and its order, improving a classical theorem due to Erd¨os, Pach, Pollack and Tuza. -

The Wiener Dimension of a Graph
The Wiener dimension of a graph Yaser Alizadeh Department of Mathematics Tarbiat Modares University, Tehran, Iran [email protected] Sandi Klavˇzar∗ Faculty of Mathematics and Physics University of Ljubljana, Slovenia and Faculty of Natural Sciences and Mathematics University of Maribor, Slovenia [email protected] March 13, 2012 Abstract The Wiener dimension of a connected graph is introduced as the number of different distances of its vertices. For any integer d and any integer k, a graph of diameter d and of Wiener dimension k is constructed. An infinite family of non-vertex-transitive graphs with Wiener dimension 1 is also presented and it is proved that a graph of dimension 1 is 2-connected. Keywords: Wiener index; Cartesian product graphs; vertex-transitive graphs AMS subject classification (2010): 05C12, 05C25, 92E10 1 Introduction The distance considered in this paper is the usual shortest path distance. We assume throughout the paper that all graphs are connected unless stated otherwise. For terms not defined here we refer to [13]. Let G be a graph and u ∈ V (G). Then the distance of u is dG(u)= X dG(u, v) . v∈V (G) ∗ This work has been financed by ARRS Slovenia under the grant P1-0297 and within the EU- ROCORES Programme EUROGIGA/GReGAS of the European Science Foundation. The author is also with the Institute of Mathematics, Physics and Mechanics, Ljubljana. 1 In location theory, sets of vertices with the minimum (or maximum) distance in a graph play s special role because they form target sets for locations of facilities. -

Induced Saturation Number Jason James Smith Iowa State University
Iowa State University Digital Repository @ Iowa State University Graduate Theses and Dissertations Graduate College 2012 Induced Saturation Number Jason James Smith Iowa State University Follow this and additional works at: http://lib.dr.iastate.edu/etd Part of the Mathematics Commons Recommended Citation Smith, Jason James, "Induced Saturation Number" (2012). Graduate Theses and Dissertations. Paper 12465. This Dissertation is brought to you for free and open access by the Graduate College at Digital Repository @ Iowa State University. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Digital Repository @ Iowa State University. For more information, please contact [email protected]. Induced saturation number by Jason James Smith A dissertation submitted to the graduate faculty in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Major: Mathematics Program of Study Committee: Ryan Martin, Major Professor Leslie Hogben Maria Axenovich Ling Long Jack Lutz Iowa State University Ames, Iowa 2012 Copyright © Jason James Smith, 2012. All rights reserved. ii TABLE OF CONTENTS LIST OF FIGURES . iv ACKNOWLEDGEMENTS . vi ABSTRACT . vii CHAPTER 1. INTRODUCTION . 1 1.1 Saturation in Graphs . .1 1.1.1 Definitions and Notation . .2 1.1.2 Applications . .4 CHAPTER 2. INDUCED SATURATION NUMBER AND BOUNDS . 5 2.1 Bounds for Induced Saturation Number . .5 2.2 Induced Saturation Number for a Few Families of Graphs . 12 n+1 CHAPTER 3. INDUCED SATURATION NUMBER OF P4 IS 3 ..... 15 3.1 Definitions and Notation . 15 3.2 Upper Bound by Construction . 17 3.3 Lower Bound by Induction . 19 3.4 Technical Lemma . -

Fundamental Properties and (5,0)-Nanotubical Fullerenes
MATCH MATCH Commun. Math. Comput. Chem. 72 (2014) 279-294 Communications in Mathematical and in Computer Chemistry ISSN 0340 - 6253 Wiener Dimension: Fundamental Properties and (5,0)-Nanotubical Fullerenes Yaser Alizadeha, Vesna Andova b1, Sandi Klavˇzar c,d,e, Riste Skrekovskiˇ c,e,f,g aDepartment of Mathematics, Hakim Sabzevari University, Sabzevar, Iran E-mail: [email protected] 2Faculty of Electrical Engineering and Information Technologies, Ss Cyril and Methodius Univ., Ruger Boskovik, P. O. Box 574, 1000 Skopje, Macedonia E-mail: [email protected] cFaculty of Mathematics and Physics, University of Ljubljana, Slovenia dFaculty of Natural Sciences and Mathematics, University of Maribor, Slovenia eInstitute of Mathematics, Physics and Mechanics, Ljubljana, Slovenia E-mail: [email protected] f Faculty of Information Studies, Novo Mesto, Slovenia gFaculty of Mathematics, Natural Sciences and Information Technologies, University of Primorska, Slovenia E-mail: [email protected] (Received January 24, 2014) Abstract The Wiener dimension of a connected graph is introduced as the number of different distances of its vertices. For any integer D and any integer k, a graph of diameter D and of Wiener dimension k is constructed. An infinite family of non-vertex-transitive graphs with Wiener dimension 1 is presented and it is proved that a graph of dimension 1 is 2-connected. It is shown that the (5, 0)-nanotubical fullerene graph on 10k (k ≥ 3) vertices has Wiener dimension k. As a consequence the Wiener index of these fullerenes is obtained. 1Corresponding author -280- 1 Introduction The distance considered in this paper is the usual shortest path distance. -

On Cubic Graphs Admitting an Edge-Transitive Solvable Group
Journal of Algebraic Combinatorics, 20, 99–113, 2004 c 2004 Kluwer Academic Publishers. Manufactured in The Netherlands. On Cubic Graphs Admitting an Edge-Transitive Solvable Group ALEKSANDER MALNICˇ ∗ DRAGAN MARUSIˇ Cˇ ∗ PRIMOZˇ POTOCNIKˇ † IMFM, Oddelek za matematiko, Univerza v Ljubljani, Jadranska 19, 1111 Ljubljana, Slovenija Received March 14, 2002; Revised August 21, 2003; Accepted October 14, 2003 Abstract. Using covering graph techniques, a structural result about connected cubic simple graphs admitting an edge-transitive solvable group of automorphisms is proved. This implies, among other, that every such graph can be obtained from either the 3-dipole Dip3 or the complete graph K4,byasequence of elementary-abelian covers. Another consequence of the main structural result is that the action of an arc-transitive solvable group on a connected cubic simple graph is at most 3-arc-transitive. As an application, a new infinite family of semisymmetric cubic graphs, arising as regular elementary abelian covering projections of K3,3,isconstructed. Keywords: symmetric graph, edge transitive graph, cubic graph, trivalent graph, covering projection of graphs, solvable group of automorphisms 1. Introduction Throughout this paper graphs are assumed to be finite, and unless specified otherwise, simple, undirected and connected. It transpires that, when investigating edge-transitive cubic (simple) graphs the concept of graph coverings plays a central role. A correct treatment of this concept calls for a more general definition of a graph (see Section 2), with the class of simple graphs as a special case. The study of cubic arc-transitive graphs has its roots in the classical result of Tutte [20], who proved that cubic graphs are at most 5-arc-transitive. -

Smallest Cubic and Quartic Graphs with a Given Number of Cutpoints and Bridges Gary Chartrand
Old Dominion University ODU Digital Commons Mathematics & Statistics Faculty Publications Mathematics & Statistics 1982 Smallest Cubic and Quartic Graphs With a Given Number of Cutpoints and Bridges Gary Chartrand Farrokh Saba John K. Cooper Jr. Frank Harary Curtiss E. Wall Old Dominion University Follow this and additional works at: https://digitalcommons.odu.edu/mathstat_fac_pubs Part of the Mathematics Commons Repository Citation Chartrand, Gary; Saba, Farrokh; Cooper, John K. Jr.; Harary, Frank; and Wall, Curtiss E., "Smallest Cubic and Quartic Graphs With a Given Number of Cutpoints and Bridges" (1982). Mathematics & Statistics Faculty Publications. 76. https://digitalcommons.odu.edu/mathstat_fac_pubs/76 Original Publication Citation Chartrand, G., Saba, F., Cooper, J. K., Harary, F., & Wall, C. E. (1982). Smallest cubic and quartic graphs with a given number of cutpoints and bridges. International Journal of Mathematics and Mathematical Sciences, 5(1), 41-48. doi:10.1155/s0161171282000052 This Article is brought to you for free and open access by the Mathematics & Statistics at ODU Digital Commons. It has been accepted for inclusion in Mathematics & Statistics Faculty Publications by an authorized administrator of ODU Digital Commons. For more information, please contact [email protected]. I nternat. J. Math. & Math. Sci. Vol. 5 No. (1982)41-48 41 SMALLEST CUBIC AND QUARTIC GRAPHS WITH A GIVEN NUMBER OF CUTPOINTS AND BRIDGES GARY CHARTRAND and FARROKH SABA Department of Mathematics, Western Michigan University Kalamazoo, Michigan 49008 U. S .A. JOHN K. COOPER, JR. Department of Mathematics, Eastern Michigan University Ypsilanti, Michigan 48197 U.S.A. FRANK HARARY Department of Mathematics, University of Michigan Ann Arbor, Michigan 48104 U.S.A.