Lidar Remote Sensing
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

CHAPTER CONTENTS Page CHAPTER 5
CHAPTER CONTENTS Page CHAPTER 5. SPECIAL PROFILING TECHNIQUES FOR THE BOUNDARY LAYER AND THE TROPOSPHERE .............................................................. 640 5.1 General ................................................................... 640 5.2 Surface-based remote-sensing techniques ..................................... 640 5.2.1 Acoustic sounders (sodars) ........................................... 640 5.2.2 Wind profiler radars ................................................. 641 5.2.3 Radio acoustic sounding systems ...................................... 643 5.2.4 Microwave radiometers .............................................. 644 5.2.5 Laser radars (lidars) .................................................. 645 5.2.6 Global Navigation Satellite System ..................................... 646 5.2.6.1 Description of the Global Navigation Satellite System ............. 647 5.2.6.2 Tropospheric Global Navigation Satellite System signal ........... 648 5.2.6.3 Integrated water vapour. 648 5.2.6.4 Measurement uncertainties. 649 5.3 In situ measurements ....................................................... 649 5.3.1 Balloon tracking ..................................................... 649 5.3.2 Boundary layer radiosondes .......................................... 649 5.3.3 Instrumented towers and masts ....................................... 650 5.3.4 Instrumented tethered balloons ....................................... 651 ANNEX. GROUND-BASED REMOTE-SENSING OF WIND BY HETERODYNE PULSED DOPPLER LIDAR ................................................................ -

An LES-Based Airborne Doppler Lidar Simulator and Its Application to Wind Profiling in Inhomogeneous flow Conditions
Atmos. Meas. Tech., 13, 1609–1631, 2020 https://doi.org/10.5194/amt-13-1609-2020 © Author(s) 2020. This work is distributed under the Creative Commons Attribution 4.0 License. An LES-based airborne Doppler lidar simulator and its application to wind profiling in inhomogeneous flow conditions Philipp Gasch1, Andreas Wieser1, Julie K. Lundquist2,3, and Norbert Kalthoff1 1Institute of Meteorology and Climate Research, Karlsruhe Institute of Technology, Karlsruhe, Germany 2Department of Atmospheric and Oceanic Sciences, University of Colorado Boulder, Boulder, CO 80303, USA 3National Renewable Energy Laboratory, Golden, CO 80401, USA Correspondence: Philipp Gasch ([email protected]) Received: 26 March 2019 – Discussion started: 5 June 2019 Revised: 19 February 2020 – Accepted: 19 February 2020 – Published: 2 April 2020 Abstract. Wind profiling by Doppler lidar is common prac- profiling at low wind speeds (< 5ms−1) can be biased, if tice and highly useful in a wide range of applications. Air- conducted in regions of inhomogeneous flow conditions. borne Doppler lidar can provide additional insights relative to ground-based systems by allowing for spatially distributed and targeted measurements. Providing a link between the- ory and measurement, a first large eddy simulation (LES)- 1 Introduction based airborne Doppler lidar simulator (ADLS) has been de- veloped. Simulated measurements are conducted based on Doppler lidar has experienced rapidly growing importance LES wind fields, considering the coordinate and geometric and usage in remote sensing of atmospheric winds over transformations applicable to real-world measurements. The the past decades (Weitkamp et al., 2005). Sectors with ADLS provides added value as the input truth used to create widespread usage include boundary layer meteorology, wind the measurements is known exactly, which is nearly impos- energy and airport management. -

Generation of GOES-16 True Color Imagery Without a Green Band
Confidential manuscript submitted to Earth and Space Science 1 Generation of GOES-16 True Color Imagery without a Green Band 2 M.K. Bah1, M. M. Gunshor1, T. J. Schmit2 3 1 Cooperative Institute for Meteorological Satellite Studies (CIMSS), 1225 West Dayton Street, 4 Madison, University of Wisconsin-Madison, Madison, Wisconsin, USA 5 2 NOAA/NESDIS Center for Satellite Applications and Research, Advanced Satellite Products 6 Branch (ASPB), Madison, Wisconsin, USA 7 8 Corresponding Author: Kaba Bah: ([email protected]) 9 Key Points: 10 • The Advanced Baseline Imager (ABI) is the latest generation Geostationary Operational 11 Environmental Satellite (GOES) imagers operated by the U.S. The ABI is improved in 12 many ways over preceding GOES imagers. 13 • There are a number of approaches to generating true color images; all approaches that use 14 the GOES-16 ABI need to first generate the visible “green” spectral band. 15 • Comparisons are shown between different methods for generating true color images from 16 the ABI observations and those from the Earth Polychromatic Imaging Camera (EPIC) on 17 Deep Space Climate Observatory (DSCOVR). 18 Confidential manuscript submitted to Earth and Space Science 19 Abstract 20 A number of approaches have been developed to generate true color images from the Advanced 21 Baseline Imager (ABI) on the Geostationary Operational Environmental Satellite (GOES)-16. 22 GOES-16 is the first of a series of four spacecraft with the ABI onboard. These approaches are 23 complicated since the ABI does not have a “green” (0.55 µm) spectral band. Despite this 24 limitation, representative true color images can be built. -

Raman Lidar for Meteorological Observations, RALMO – Part 1: Open Access Instrument Description Climate Climate of the Past 1 1 2 2 1,3 4 of The1 Past T
EGU Journal Logos (RGB) Open Access Open Access Open Access Advances in Annales Nonlinear Processes Geosciences Geophysicae in Geophysics Open Access Open Access Natural Hazards Natural Hazards and Earth System and Earth System Sciences Sciences Discussions Open Access Open Access Atmospheric Atmospheric Chemistry Chemistry and Physics and Physics Discussions Open Access Open Access Atmos. Meas. Tech., 6, 1329–1346, 2013 Atmospheric Atmospheric www.atmos-meas-tech.net/6/1329/2013/ doi:10.5194/amt-6-1329-2013 Measurement Measurement © Author(s) 2013. CC Attribution 3.0 License. Techniques Techniques Discussions Open Access Open Access Biogeosciences Biogeosciences Discussions Open Access Raman Lidar for Meteorological Observations, RALMO – Part 1: Open Access Instrument description Climate Climate of the Past 1 1 2 2 1,3 4 of the1 Past T. Dinoev , V. Simeonov , Y. Arshinov , S. Bobrovnikov , P. Ristori , B. Calpini , M. Parlange , and H. van den Discussions Bergh5 1 Open Access Laboratory of Environmental Fluid Mechanics and Hydrology (EFLUM), Ecole Polytechnique Fed´ erale´ de Lausanne Open Access EPFL-ENAC, Station 2, 1015 Lausanne, Switzerland Earth System 2 Earth System V.E. Zuev Institute of Atmospheric Optics SB RAS1, Academician Zuev Square, Tomsk, 634021, Russia Dynamics 3Division´ Lidar, CEILAP (UNIDEF-CITEDEF-MINDEF-CONICET), San Juan Bautista de La SalleDynamics 4397 (B1603ALO), Villa Martelli, Buenos Aires, Argentina Discussions 4Federal Office of Meteorology and Climatology MeteoSwiss, Atmospheric Data, P.O. Box 316, 1530 Payerne, Switzerland 5 Open Access Laboratory of Air and Soil Pollution, Ecole Polytechnique Fed´ erale´ de Lausanne EPFL, StationGeoscientific 6, Geoscientific Open Access 1015 Lausanne, Switzerland Instrumentation Instrumentation Correspondence to: V. B. -

Editorial for the Special Issue “Remote Sensing of Clouds”
remote sensing Editorial Editorial for the Special Issue “Remote Sensing of Clouds” Filomena Romano Institute of Methodologies for Environmental Analysis, National Research Council (IMAA/CNR), 85100 Potenza, Italy; fi[email protected] Received: 7 December 2020; Accepted: 8 December 2020; Published: 14 December 2020 Keywords: clouds; satellite; ground-based; remote sensing; meteorology; microphysical cloud parameters Remote sensing of clouds is a subject of intensive study in modern atmospheric remote sensing. Cloud systems are important in weather, hydrological, and climate research, as well as in practical applications. Because they affect water transport and precipitation, clouds play an integral role in the Earth’s hydrological cycle. Moreover, they impact the Earth’s energy budget by interacting with incoming shortwave radiation and outgoing longwave radiation. Clouds can markedly affect the radiation budget, both in the solar and thermal spectral ranges, thereby playing a fundamental role in the Earth’s climatic state and affecting climate forcing. Global changes in surface temperature are highly sensitive to the amounts and types of clouds. Hence, it is not surprising that the largest uncertainty in model estimates of global warming is due to clouds. Their properties can change over time, leading to a planetary energy imbalance and effects on a global scale. Optical and thermal infrared remote sensing of clouds is a mature research field with a long history, and significant progress has been achieved using both ground-based and satellite instrumentation in the retrieval of microphysical cloud parameters. This Special Issue (SI) presents recent results in ground-based and satellite remote sensing of clouds, including innovative applications for meteorology and atmospheric physics, as well as the validation of retrievals based on independent measurements. -

The Benefits of Lidar for Meteorological Research: the Convective and Orographically-Induced Precipitation Study (Cops)
THE BENEFITS OF LIDAR FOR METEOROLOGICAL RESEARCH: THE CONVECTIVE AND OROGRAPHICALLY-INDUCED PRECIPITATION STUDY (COPS) Andreas Behrendt(1), Volker Wulfmeyer(1), Christoph Kottmeier(2), Ulrich Corsmeier(2) (1)Institute of Physics and Meteorology, University of Hohenheim, D-70593 Stuttgart, Germany, [email protected] (2) Institute for Meteorology and Climate Research (IMK), University of Karlsruhe/Forschungszentrum Karlsruhe, Karlsruhe, Germany ABSTRACT results of instrumental development within an intensive observations period. How can lidar serve to improve today's numerical Such a field experiment is the Convective and Oro- weather forecast? Which benefits does lidar offer com- graphically-induced Precipitation Study (COPS, pared with other techniques? Which measured parame- http://www.uni-hohenheim.de/spp-iop/) which takes ters, which resolution and accuracy, which platforms place in summer 2007 in a low-mountain range in and measurement strategies are needed? Using the next Southern-Western Germany and North-Eastern France. generation of high-resolution models, a refined model This area is characterized by high summer thunderstorm representation of atmospheric processes is currently in activity and particularly low skill of numerical weather development. Besides higher resolution, the refinements prediction models. COPS is part of the German Priority comprise improved parameterizations, new model phys- Program "Praecipitationis Quantitativae Predictio" ics – including, e.g., the effects of aerosols – and assimi- (PQP, http://www.meteo.uni-bonn.de/projekte/- lation of additional data. As example to discuss the role SPPMeteo/) and has been endorsed as World Weather lidar can play in this context we introduce the Convec- Research Program (WWRP) Research and Development tive and Orographically-induced Precipitation Study Project (Fig. -

Cassini RADAR Sequence Planning and Instrument Performance Richard D
IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 47, NO. 6, JUNE 2009 1777 Cassini RADAR Sequence Planning and Instrument Performance Richard D. West, Yanhua Anderson, Rudy Boehmer, Leonardo Borgarelli, Philip Callahan, Charles Elachi, Yonggyu Gim, Gary Hamilton, Scott Hensley, Michael A. Janssen, William T. K. Johnson, Kathleen Kelleher, Ralph Lorenz, Steve Ostro, Member, IEEE, Ladislav Roth, Scott Shaffer, Bryan Stiles, Steve Wall, Lauren C. Wye, and Howard A. Zebker, Fellow, IEEE Abstract—The Cassini RADAR is a multimode instrument used the European Space Agency, and the Italian Space Agency to map the surface of Titan, the atmosphere of Saturn, the Saturn (ASI). Scientists and engineers from 17 different countries ring system, and to explore the properties of the icy satellites. have worked on the Cassini spacecraft and the Huygens probe. Four different active mode bandwidths and a passive radiometer The spacecraft was launched on October 15, 1997, and then mode provide a wide range of flexibility in taking measurements. The scatterometer mode is used for real aperture imaging of embarked on a seven-year cruise out to Saturn with flybys of Titan, high-altitude (around 20 000 km) synthetic aperture imag- Venus, the Earth, and Jupiter. The spacecraft entered Saturn ing of Titan and Iapetus, and long range (up to 700 000 km) orbit on July 1, 2004 with a successful orbit insertion burn. detection of disk integrated albedos for satellites in the Saturn This marked the start of an intensive four-year primary mis- system. Two SAR modes are used for high- and medium-resolution sion full of remote sensing observations by a dozen instru- (300–1000 m) imaging of Titan’s surface during close flybys. -

Radar Remote Sensing - S
GEOINFORMATICS – Vol. I - Radar Remote Sensing - S. Quegan RADAR REMOTE SENSING S. Quegan Sheffield Centre for Earth Observation Science, University of Sheffield, U.K. Keywords: Scatterometry, altimetry, synthetic aperture radar, SAR, microwaves, scattering models, geocoding, radargrammetry, interferometry, differential interferometry, topographic mapping, digital elevation model, agriculture, forestry, hydrology, soil moisture, earthquakes, floods, oceanography, sea ice, land ice, snow Contents 1. Introduction 2. Basic Properties of Radar Systems 3. Characteristics of Radar Systems 4. What a Radar Measures 5. Radar Sensors and Their Applications 6. Synthetic Aperture Radar Applications 7. Future Prospects Glossary Bibliography Biographical Sketch Summary Radar sensors transmit radiation at radio wavelengths (i.e. from around 1 cm to several meters) and use the measured return to infer properties of the earth’s surface. The surface properties affecting the return (of which the most important are the dielectric constant and geometrical structure) are very different from those determining observations at optical and infrared frequencies. Hence radar offers distinctive perspectives on the earth. In addition, the transparency of the atmosphere at radar wavelengths means that cloud does not prevent observation of the earth, so radar is well suited to monitoring purposes. Three types of spaceborne radar instrument are particularly important. Scatterometers make very accurate measurements of the backscatter fromUNESCO the earth, their most impor –tant EOLSSuse being to derive wind speeds and directions over the ocean. Altimeters measure the distance between the satellite platform and the surface to centimetric accuracy, from which several important geophysical quantities can be recovered, such as the topography of the ocean surface and its variation, oceanSAMPLE currents, significant wave height, CHAPTERS and the mass balance and dynamics of the major ice sheets. -

Observations of Atmospheric Aerosol and Cloud Using a Polarized Micropulse Lidar in Xi’An, China
atmosphere Article Observations of Atmospheric Aerosol and Cloud Using a Polarized Micropulse Lidar in Xi’an, China Chao Chen 1,2,3,4, Xiaoquan Song 1,* , Zhangjun Wang 1,2,3,4,*, Wenyan Wang 5, Xiufen Wang 2,3,4, Quanfeng Zhuang 2,3,4, Xiaoyan Liu 1,2,3,4 , Hui Li 2,3,4, Kuntai Ma 1, Xianxin Li 2,3,4, Xin Pan 2,3,4, Feng Zhang 2,3,4, Boyang Xue 2,3,4 and Yang Yu 2,3,4 1 College of Information Science and Engineering, Ocean University of China, Qingdao 266100, China; [email protected] (C.C.); [email protected] (X.L.); [email protected] (K.M.) 2 Institute of Oceanographic Instrumentation, Qilu University of Technology (Shandong Academy of Sciences), Qingdao 266100, China; [email protected] (X.W.); [email protected] (Q.Z.); [email protected] (H.L.); [email protected] (X.L.); [email protected] (X.P.); [email protected] (F.Z.); [email protected] (B.X.); [email protected] (Y.Y.) 3 Shandong Provincial Key Laboratory of Marine Monitoring Instrument Equipment Technology, Qingdao 266100, China 4 National Engineering and Technological Research Center of Marine Monitoring Equipment, Qingdao 266100, China 5 Xi’an Meteorological Bureau of Shanxi Province, Xi’an 710016, China; [email protected] * Correspondence: [email protected] (X.S.); [email protected] (Z.W.) Abstract: A polarized micropulse lidar (P-MPL) employing a pulsed laser at 532 nm was developed by the Institute of Oceanographic Instrumentation, Qilu University of Technology (Shandong Academy Citation: Chen, C.; Song, X.; Wang, of Sciences). -
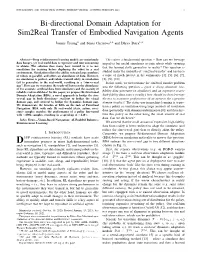
Bi-Directional Domain Adaptation for Sim2real Transfer of Embodied Navigation Agents
IEEE ROBOTICS AND AUTOMATION LETTERS. PREPRINT VERSION. ACCEPTED FEBRUARY, 2021 1 Bi-directional Domain Adaptation for Sim2Real Transfer of Embodied Navigation Agents Joanne Truong1 and Sonia Chernova1;2 and Dhruv Batra1;2 Abstract—Deep reinforcement learning models are notoriously This raises a fundamental question – How can we leverage data hungry, yet real-world data is expensive and time consuming imperfect but useful simulators to train robots while ensuring to obtain. The solution that many have turned to is to use that the learned skills generalize to reality? This question is simulation for training before deploying the robot in a real environment. Simulation offers the ability to train large numbers studied under the umbrella of ‘sim2real transfer’ and has been of robots in parallel, and offers an abundance of data. However, a topic of much interest in the community [4], [5], [6], [7], no simulation is perfect, and robots trained solely in simulation [8], [9], [10]. fail to generalize to the real-world, resulting in a “sim-vs-real In this work, we first reframe the sim2real transfer problem gap”. How can we overcome the trade-off between the abundance into the following question – given a cheap abundant low- of less accurate, artificial data from simulators and the scarcity of reliable, real-world data? In this paper, we propose Bi-directional fidelity data generator (a simulator) and an expensive scarce Domain Adaptation (BDA), a novel approach to bridge the sim- high-fidelity data source (reality), how should we best leverage vs-real gap in both directions– real2sim to bridge the visual the two to maximize performance of an agent in the expensive domain gap, and sim2real to bridge the dynamics domain gap. -

Conclusions Introduction Coherent Doppler LIDAR LIDAR Observation
Improvement of Long Range Doppler LIDARs of TM-SFW0603 Mitsubishi Electric Corporation (MELCO) Ikuya Kakimoto*1, Yutaka Kajiyama*1, Jong-Sung Ha*2, Hong-II Kim*2 *1 Mitsubishi Electric Corporation, 8-1-1 Tsukaguchi Honmachi, Amagasaki-city, 661-8661, Japan *2 Korea Aerospace research Institute, 169-84 Gwahangno, Yuseong-gu, Daejeon, 305-806, Korea Introduction LIDAR observation system linking with Radar Wind measurement is considered as one of the most important issues for Thunderstorm Forecasting System Wind shear detection system the prediction and elucidation of meteorological phenomena. As the formal instrument for wind measurement, ground-based anemometer, radiosonde, Doppler radar and Wind Profiler are utilized so far. However, it is quite difficult to scan the three dimensional (3D) wind field including zenith, and only Doppler radar can be utilized to measure 3D wind speed and direction in the case of rainfall. In recent years, Doppler LIDARs have been developed and it can scan 3-D wind field even in the case of fine weather and is proceeded to be utilized in a variety of fields. Therefore, it is possible to implement all-weather wind measurement with the set of Doppler LIDAR and Doppler radar and this set is much effective to Fig. 6 Wind shear detection system monitor the safety of air at the airport, launch complex and other fields. Fig. 5 Thunderstorm forecasting system Coherent Doppler LIDAR Radars can detect turbulences in The indication of torrential rain can be the rain and LIDAR can do that DIABREZZATM A Series detected 20 min. before by Ka-band. in fine weather. -
Fundamentals of Remote Sensing
Fundamentals of Remote Sensing A Canada Centre for Remote Sensing Remote Sensing Tutorial Natural Resources Ressources naturelles Canada Canada Fundamentals of Remote Sensing - Table of Contents Page 2 Table of Contents 1. Introduction 1.1 What is Remote Sensing? 5 1.2 Electromagnetic Radiation 7 1.3 Electromagnetic Spectrum 9 1.4 Interactions with the Atmosphere 12 1.5 Radiation - Target 16 1.6 Passive vs. Active Sensing 19 1.7 Characteristics of Images 20 1.8 Endnotes 22 Did You Know 23 Whiz Quiz and Answers 27 2. Sensors 2.1 On the Ground, In the Air, In Space 34 2.2 Satellite Characteristics 36 2.3 Pixel Size, and Scale 39 2.4 Spectral Resolution 41 2.5 Radiometric Resolution 43 2.6 Temporal Resolution 44 2.7 Cameras and Aerial Photography 45 2.8 Multispectral Scanning 48 2.9 Thermal Imaging 50 2.10 Geometric Distortion 52 2.11 Weather Satellites 54 2.12 Land Observation Satellites 60 2.13 Marine Observation Satellites 67 2.14 Other Sensors 70 2.15 Data Reception 72 2.16 Endnotes 74 Did You Know 75 Whiz Quiz and Answers 83 Canada Centre for Remote Sensing Fundamentals of Remote Sensing - Table of Contents Page 3 3. Microwaves 3.1 Introduction 92 3.2 Radar Basic 96 3.3 Viewing Geometry & Spatial Resolution 99 3.4 Image distortion 102 3.5 Target interaction 106 3.6 Image Properties 110 3.7 Advanced Applications 114 3.8 Polarimetry 117 3.9 Airborne vs Spaceborne 123 3.10 Airborne & Spaceborne Systems 125 3.11 Endnotes 129 Did You Know 131 Whiz Quiz and Answers 135 4.