A Method for Predicting Multivariate Random Loads and a Discrete Approximation of the Multidimensional Design Load Envelope
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A New Calculable Orbital-Model of the Atomic Nucleus Based on a Platonic-Solid Framework
A new calculable Orbital-Model of the Atomic Nucleus based on a Platonic-Solid framework and based on constant Phi by Dipl. Ing. (FH) Harry Harry K. K.Hahn Hahn / Germany ------------------------------ 12. December 2020 Abstract : Crystallography indicates that the structure of the atomic nucleus must follow a crystal -like order. Quasicrystals and Atomic Clusters with a precise Icosahedral - and Dodecahedral structure indi cate that the five Platonic Solids are the theoretical framework behind the design of the atomic nucleus. With my study I advance the hypothesis that the reference for the shell -structure of the atomic nucleus are the Platonic Solids. In my new model of the atomic nucleus I consider the central space diagonals of the Platonic Solids as the long axes of Proton - or Neutron Orbitals, which are similar to electron orbitals. Ten such Proton- or Neutron Orbitals form a complete dodecahedral orbital-stru cture (shell), which is the shell -type with the maximum number of protons or neutrons. An atomic nucleus therefore mainly consists of dodecahedral shaped shells. But stable Icosahedral- and Hexagonal-(cubic) shells also appear in certain elements. Consta nt PhI which directly appears in the geometry of the Dodecahedron and Icosahedron seems to be the fundamental constant that defines the structure of the atomic nucleus and the structure of the wave systems (orbitals) which form the atomic nucelus. Albert Einstein wrote in a letter that the true constants of an Universal Theory must be mathematical constants like Pi (π) or e. My mathematical discovery described in chapter 5 shows that all irrational square roots of the natural numbers and even constant Pi (π) can be expressed with algebraic terms that only contain constant Phi (ϕ) and 1 Therefore it is logical to assume that constant Phi, which also defines the structure of the Platonic Solids must be the fundamental constant that defines the structure of the atomic nucleus. -

The Roundest Polyhedra with Symmetry Constraints
Article The Roundest Polyhedra with Symmetry Constraints András Lengyel *,†, Zsolt Gáspár † and Tibor Tarnai † Department of Structural Mechanics, Budapest University of Technology and Economics, H-1111 Budapest, Hungary; [email protected] (Z.G.); [email protected] (T.T.) * Correspondence: [email protected]; Tel.: +36-1-463-4044 † These authors contributed equally to this work. Academic Editor: Egon Schulte Received: 5 December 2016; Accepted: 8 March 2017; Published: 15 March 2017 Abstract: Amongst the convex polyhedra with n faces circumscribed about the unit sphere, which has the minimum surface area? This is the isoperimetric problem in discrete geometry which is addressed in this study. The solution of this problem represents the closest approximation of the sphere, i.e., the roundest polyhedra. A new numerical optimization method developed previously by the authors has been applied to optimize polyhedra to best approximate a sphere if tetrahedral, octahedral, or icosahedral symmetry constraints are applied. In addition to evidence provided for various cases of face numbers, potentially optimal polyhedra are also shown for n up to 132. Keywords: polyhedra; isoperimetric problem; point group symmetry 1. Introduction The so-called isoperimetric problem in mathematics is concerned with the determination of the shape of spatial (or planar) objects which have the largest possible volume (or area) enclosed with given surface area (or circumference). The isoperimetric problem for polyhedra can be reflected in a question as follows: What polyhedron maximizes the volume if the surface area and the number of faces n are given? The problem can be quantified by the so-called Steinitz number [1] S = A3/V2, a dimensionless quantity in terms of the surface area A and volume V of the polyhedron, such that solutions of the isoperimetric problem minimize S. -

Of Great Rhombicuboctahedron/Archimedean Solid
Mathematical Analysis of Great Rhombicuboctahedron/Archimedean Solid Mr Harish Chandra Rajpoot M.M.M. University of Technology, Gorakhpur-273010 (UP), India March, 2015 Introduction: A great rhombicuboctahedron is an Archimedean solid which has 12 congruent square faces, 8 congruent regular hexagonal faces & 6 congruent regular octagonal faces each having equal edge length. It has 72 edges & 48 vertices lying on a spherical surface with a certain radius. It is created/generated by expanding a truncated cube having 8 equilateral triangular faces & 6 regular octagonal faces. Thus by the expansion, each of 12 originally truncated edges changes into a square face, each of 8 triangular faces of the original solid changes into a regular hexagonal face & 6 regular octagonal faces of original solid remain unchanged i.e. octagonal faces are shifted radially. Thus a solid with 12 squares, 8 hexagonal & 6 octagonal faces, is obtained which is called great rhombicuboctahedron which is an Archimedean solid. (See figure 1), thus we have Figure 1: A great rhombicuboctahedron having 12 ( ) ( ) congruent square faces, 8 congruent regular ( ) ( ) hexagonal faces & 6 congruent regular octagonal faces each of equal edge length 풂 ( ) ( ) We would apply HCR’s Theory of Polygon to derive a mathematical relationship between radius of the spherical surface passing through all 48 vertices & the edge length of a great rhombicuboctahedron for calculating its important parameters such as normal distance of each face, surface area, volume etc. Derivation of outer (circumscribed) radius ( ) of great rhombicuboctahedron: Let be the radius of the spherical surface passing through all 48 vertices of a great rhombicuboctahedron with edge length & the centre O. -

A Technology to Synthesize 360-Degree Video Based on Regular Dodecahedron in Virtual Environment Systems*
A Technology to Synthesize 360-Degree Video Based on Regular Dodecahedron in Virtual Environment Systems* Petr Timokhin 1[0000-0002-0718-1436], Mikhail Mikhaylyuk2[0000-0002-7793-080X], and Klim Panteley3[0000-0001-9281-2396] Federal State Institution «Scientific Research Institute for System Analysis of the Russian Academy of Sciences», Moscow, Russia 1 [email protected], 2 [email protected], 3 [email protected] Abstract. The paper proposes a new technology of creating panoramic video with a 360-degree view based on virtual environment projection on regular do- decahedron. The key idea consists in constructing of inner dodecahedron surface (observed by the viewer) composed of virtual environment snapshots obtained by twelve identical virtual cameras. A method to calculate such cameras’ projec- tion and orientation parameters based on “golden rectangles” geometry as well as a method to calculate snapshots position around the observer ensuring synthe- sis of continuous 360-panorama are developed. The technology and the methods were implemented in software complex and tested on the task of virtual observing the Earth from space. The research findings can be applied in virtual environment systems, video simulators, scientific visualization, virtual laboratories, etc. Keywords: Visualization, Virtual Environment, Regular Dodecahedron, Video 360, Panoramic Mapping, GPU. 1 Introduction In modern human activities the importance of the visualization of virtual prototypes of real objects and phenomena is increasingly grown. In particular, it’s especially required for training specialists in space and aviation industries, medicine, nuclear industry and other areas, where the mistake cost is extremely high [1-3]. The effectiveness of work- ing with virtual prototypes is significantly increased if an observer experiences a feeling of being present in virtual environment. -
Unit 6 Visualising Solid Shapes(Final)
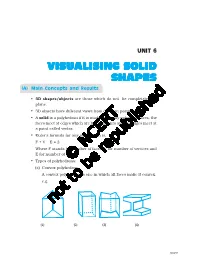
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

Convex Polytopes and Tilings with Few Flag Orbits
Convex Polytopes and Tilings with Few Flag Orbits by Nicholas Matteo B.A. in Mathematics, Miami University M.A. in Mathematics, Miami University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Abstract of Dissertation The amount of symmetry possessed by a convex polytope, or a tiling by convex polytopes, is reflected by the number of orbits of its flags under the action of the Euclidean isometries preserving the polytope. The convex polytopes with only one flag orbit have been classified since the work of Schläfli in the 19th century. In this dissertation, convex polytopes with up to three flag orbits are classified. Two-orbit convex polytopes exist only in two or three dimensions, and the only ones whose combinatorial automorphism group is also two-orbit are the cuboctahedron, the icosidodecahedron, the rhombic dodecahedron, and the rhombic triacontahedron. Two-orbit face-to-face tilings by convex polytopes exist on E1, E2, and E3; the only ones which are also combinatorially two-orbit are the trihexagonal plane tiling, the rhombille plane tiling, the tetrahedral-octahedral honeycomb, and the rhombic dodecahedral honeycomb. Moreover, any combinatorially two-orbit convex polytope or tiling is isomorphic to one on the above list. Three-orbit convex polytopes exist in two through eight dimensions. There are infinitely many in three dimensions, including prisms over regular polygons, truncated Platonic solids, and their dual bipyramids and Kleetopes. There are infinitely many in four dimensions, comprising the rectified regular 4-polytopes, the p; p-duoprisms, the bitruncated 4-simplex, the bitruncated 24-cell, and their duals. -
Step 1: 3D Shapes
Year 1 – Autumn Block 3 – Shape Step 1: 3D Shapes © Classroom Secrets Limited 2018 Introduction Match the shape to its correct name. A. B. C. D. E. cylinder square- cuboid cube sphere based pyramid © Classroom Secrets Limited 2018 Introduction Match the shape to its correct name. A. B. C. D. E. cube sphere square- cylinder cuboid based pyramid © Classroom Secrets Limited 2018 Varied Fluency 1 True or false? The shape below is a cone. © Classroom Secrets Limited 2018 Varied Fluency 1 True or false? The shape below is a cone. False, the shape is a triangular-based pyramid. © Classroom Secrets Limited 2018 Varied Fluency 2 Circle the correct name of the shape below. cylinder pyramid cuboid © Classroom Secrets Limited 2018 Varied Fluency 2 Circle the correct name of the shape below. cylinder pyramid cuboid © Classroom Secrets Limited 2018 Varied Fluency 3 Which shape is the odd one out? © Classroom Secrets Limited 2018 Varied Fluency 3 Which shape is the odd one out? The cuboid is the odd one out because the other shapes are cylinders. © Classroom Secrets Limited 2018 Varied Fluency 4 Follow the path of the cuboids to make it through the maze. Start © Classroom Secrets Limited 2018 Varied Fluency 4 Follow the path of the cuboids to make it through the maze. Start © Classroom Secrets Limited 2018 Reasoning 1 The shapes below are labelled. Spot the mistake. A. B. C. cone cuboid cube Explain your answer. © Classroom Secrets Limited 2018 Reasoning 1 The shapes below are labelled. Spot the mistake. A. B. C. cone cuboid cube Explain your answer. -

Optimization of Tensegrity Lattice with Truncated Octahedral Units
OptimizationM. Ohsaki, J. Y. of Zhang, tensegrity K. Kogiso lattice andwith J. truncated J. Rimoli octahedral units Proceedings of the IASS Annual Symposium 2019 – Structural Membranes 2019 Form and Force 7 – 10 October 2019, Barcelona, Spain C. Lázaro, K.-U. Bletzinger, E. Oñate (eds.) Optimization of tensegrity lattice with truncated octahedral units Makoto OHSAKI∗a, Jingyao ZHANGa, Kosuke KOGISOa, Julian J. RIMOLIc *aDepartment of Architecture and Architectural Engineering, Kyoto University Kyoto-Daigaku Katsura, Nishikyo, Kyoto 615-8540, Japan [email protected] b School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, GA 30332, USA Abstract An optimization method is presented for tensegrity lattices composed of eight truncated octahedral units. The stored strain energy under specified forced vertical displacement is maximized under constraint on the structural material volume. The nonlinear behavior of bars allowing buckling is modeled as a bi- linear elastic material. As a result of optimization, a flexible structure with degrading vertical stiffness is obtained to be applicable to an energy absorption device or a vertical isolation system. Keywords: tensegrity, optimization, strain energy, truncated octahedral unit 1. Introduction Tensegrity structures are a class of self-standing pin jointed structures consisting of thin bars (struts) and cables stiffened by applying prestresses to their members [1, 3]. Because the bars are not continuously connected, i.e., they are topologically isolated from each other, these structures are usually too flexible to be used as load-resisting components of structures in mechanical and civil engineering applications. However, by exploiting their flexibility, tensegrity structures can be utilized as devices for reducing impact forces, isolating dynamic forces, and absorbing energy, to name a few applications [5]. -

Bridges Conference Proceedings Guidelines
Proceedings of Bridges 2013: Mathematics, Music, Art, Architecture, Culture Exploring the Vertices of a Triacontahedron Robert Weadon Rollings 883 Brimorton Drive, Scarborough, Ontario, M1G 2T8 E-mail: [email protected] Abstract The rhombic triacontahedron can be used as a framework for locating the vertices of the five platonic solids. The five models presented here, which are made of babinga wood and brass rods illustrate this relationship. Introduction My initial interest in the platonic solids began with the work of Cox [1]. My initial explorations of the platonic solids lead to the series of models Polyhedra through the Beauty of Wood [2]. I have continued this exploration by using a rhombic triacontahedron at the core of my models and illustrating its relationship to all five platonic solids. Rhombic Triacontahedron The rhombic triacontahedron has 30 rhombic faces where the ratio of the diagonals is the golden ratio. The models shown in Figures 1, 2, 4, and 5 illustrate that the vertices of an icosahedron, dodecahedron, hexahedron and tetrahedron all lie on the circumsphere of the rhombic triacontahedron. In addition, Figure 3 shows that the vertices of the octahedron lie on the inscribed sphere of the rhombic triacontahedron. Creating the Models Each of the five rhombic triacontahedrons are made of 1/4 inch thick babinga wood. The edges of the rhombi were cut at 18 degrees on a band saw. After the assembly of the triacontahedron 1/8 inch brass rods were inserted a specific vertices and then fitted with 1/2 inch cocabola wood spheres. Different vertices (or faces in the case of the octahedron) were chosen for each platonic solid. -

Polytopes and Nuclear Structure by Roger Ellman Abstract
Polytopes and Nuclear Structure by Roger Ellman Abstract While the parameters Z and A indicate a general structural pattern for the atomic nuclei, the exact nuclear masses in their fine differences appear to vary somewhat randomly, seem not to exhibit the orderly kind of logical system that nature must exhibit. It is shown that separation energy [the mass of the nucleus before decay less the mass of a decay’s products], not mass defect [the sum of the nuclear protons and neutrons masses less the nuclear mass], is the “touchstone” of nuclear stability. When not part of an atomic nucleus the neutron decays into a proton and an electron indicating that it can be deemed a combination of those two. Considering that, the nucleus can be analyzed as an assembly of A protons and N = A - Z electrons, where N of the protons form neutrons with the N electrons. Resulting analysis discloses a comprehensive orderly structure among the actual nuclear masses of all the nuclear types and isotopes. The analysis examines in detail the conditions for nuclear stability / instability. An interesting secondary component of that analysis and the resulting logical order is the family of geometric forms called polytopes, in particular the regular polyhedrons. Roger Ellman, The-Origin Foundation, Inc. http://www.The-Origin.org 320 Gemma Circle, Santa Rosa, CA 95404, USA [email protected] 1 Polytopes and Nuclear Structure Roger Ellman While the parameters, Z and A, of atomic nuclei indicate a general structural pattern for the nuclei, the exact nuclear masses in their various differences seem not to exhibit the orderly kind of logical system that nature must exhibit. -

19. Three-Dimensional Figures
19. Three-Dimensional Figures Exercise 19A 1. Question Write down the number of faces of each of the following figures: A. Cuboid B. Cube C. Triangular prism D. Square pyramid E. Tetrahedron Answer A. 6 Face is also known as sides. A Cuboid has six faces. Book, Matchbox, Brick etc. are examples of Cuboid. B.6 A Cube has six faces and all faces are equal in length. Sugar Cubes, Dice etc. are examples of Cube. C. 5 A Triangular prism has two triangular faces and three rectangular faces. D. 5 A Square pyramid has one square face as a base and four triangular faces as the sides. So, Square pyramid has total five faces. E. 4 A Tetrahedron (Triangular Pyramid) has one triangular face as a base and three triangular faces as the sides. So, Tetrahedron has total four faces. 2. Question Write down the number of edges of each of the following figures: A. Tetrahedron B. Rectangular pyramid C. Cube D. Triangular prism Answer A. 6 A Tetrahedron has six edges. OA, OB, OC, AB, AC, BC are the 6 edges. B. 8 A Rectangular Pyramid has eight edges. AB, BC, CD, DA, OA, OB, DC, OD are the 8 edges. C. 12 A Cube has twelve edges. AB, BC, CD, DA, EF, FG, GH, HE, AE, DH, BF, CG are the edges. D. 9 A Triangular prism has nine edges. AB, BC, CA, DE, EF, FD, AD, BE, CF are the9 edges. 3. Question Write down the number of vertices of each of the following figures: A. -

1 Introduction
Kumamoto J.Math. Vol.23 (2010), 49-61 Minimal Surface Area Related to Kelvin's Conjecture 1 Jin-ichi Itoh and Chie Nara 2 (Received March 2, 2009) Abstract How can a space be divided into cells of equal volume so as to minimize the surface area of the boundary? L. Kelvin conjectured that the partition made by a tiling (packing) of congruent copies of the truncated octahedron with slightly curved faces is the solution ([4]). In 1994, D. Phelan and R. Weaire [6] showed a counterexample to Kelvin's conjecture, whose tiling consists of two kinds of cells with curved faces. In this paper, we study the orthic version of Kelvin's conjecture: the truncated octahedron has the minimum surface area among all polyhedral space-fillers, where a polyhedron is called a space-filler if its congruent copies fill space with no gaps and no overlaps. We study the new conjecture by restricting a family of space- fillers to its subfamily consisting of unfoldings of doubly covered cuboids (rectangular parallelepipeds), we show that the truncated octahedron has the minimum surfacep parea among all polyhedral unfoldings of a doubly covered cuboid with relation 2 : 2 : 1 for its edge lengths. We also give the minimum surface area of polyhedral unfoldings of a doubly covered cube. 1 Introduction. The problem of foams, first raised by L. Kelvin, is easy to state and hard to solve ([4]). How can space be divided into cells of equal volume so as to minimize the surface area of the boundary? Kelvin conjectured that the partition made by a tiling (packing) of congruent copies of the truncated octahedron with slightly curved faces is the solution.