Plato's Cube and the Natural Geometry of Fragmentation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

COURT of CLAIMS of THE
REPORTS OF Cases Argued and Determined IN THE COURT of CLAIMS OF THE STATE OF ILLINOIS VOLUME 39 Containing cases in which opinions were filed and orders of dismissal entered, without opinion for: Fiscal Year 1987 - July 1, 1986-June 30, 1987 SPRINGFIELD, ILLINOIS 1988 (Printed by authority of the State of Illinois) (65655--300-7/88) PREFACE The opinions of the Court of Claims reported herein are published by authority of the provisions of Section 18 of the Court of Claims Act, Ill. Rev. Stat. 1987, ch. 37, par. 439.1 et seq. The Court of Claims has exclusive jurisdiction to hear and determine the following matters: (a) all claims against the State of Illinois founded upon any law of the State, or upon an regulation thereunder by an executive or administrative ofgcer or agency, other than claims arising under the Workers’ Compensation Act or the Workers’ Occupational Diseases Act, or claims for certain expenses in civil litigation, (b) all claims against the State founded upon any contract entered into with the State, (c) all claims against the State for time unjustly served in prisons of this State where the persons imprisoned shall receive a pardon from the Governor stating that such pardon is issued on the grounds of innocence of the crime for which they were imprisoned, (d) all claims against the State in cases sounding in tort, (e) all claims for recoupment made by the State against any Claimant, (f) certain claims to compel replacement of a lost or destroyed State warrant, (g) certain claims based on torts by escaped inmates of State institutions, (h) certain representation and indemnification cases, (i) all claims pursuant to the Law Enforcement Officers, Civil Defense Workers, Civil Air Patrol Members, Paramedics and Firemen Compensation Act, (j) all claims pursuant to the Illinois National Guardsman’s and Naval Militiaman’s Compensation Act, and (k) all claims pursuant to the Crime Victims Compensation Act. -
Warfare in a Fragile World: Military Impact on the Human Environment
Recent Slprt•• books World Armaments and Disarmament: SIPRI Yearbook 1979 World Armaments and Disarmament: SIPRI Yearbooks 1968-1979, Cumulative Index Nuclear Energy and Nuclear Weapon Proliferation Other related •• 8lprt books Ecological Consequences of the Second Ihdochina War Weapons of Mass Destruction and the Environment Publish~d on behalf of SIPRI by Taylor & Francis Ltd 10-14 Macklin Street London WC2B 5NF Distributed in the USA by Crane, Russak & Company Inc 3 East 44th Street New York NY 10017 USA and in Scandinavia by Almqvist & WikseH International PO Box 62 S-101 20 Stockholm Sweden For a complete list of SIPRI publications write to SIPRI Sveavagen 166 , S-113 46 Stockholm Sweden Stoekholol International Peace Research Institute Warfare in a Fragile World Military Impact onthe Human Environment Stockholm International Peace Research Institute SIPRI is an independent institute for research into problems of peace and conflict, especially those of disarmament and arms regulation. It was established in 1966 to commemorate Sweden's 150 years of unbroken peace. The Institute is financed by the Swedish Parliament. The staff, the Governing Board and the Scientific Council are international. As a consultative body, the Scientific Council is not responsible for the views expressed in the publications of the Institute. Governing Board Dr Rolf Bjornerstedt, Chairman (Sweden) Professor Robert Neild, Vice-Chairman (United Kingdom) Mr Tim Greve (Norway) Academician Ivan M£ilek (Czechoslovakia) Professor Leo Mates (Yugoslavia) Professor -

March 21–25, 2016
FORTY-SEVENTH LUNAR AND PLANETARY SCIENCE CONFERENCE PROGRAM OF TECHNICAL SESSIONS MARCH 21–25, 2016 The Woodlands Waterway Marriott Hotel and Convention Center The Woodlands, Texas INSTITUTIONAL SUPPORT Universities Space Research Association Lunar and Planetary Institute National Aeronautics and Space Administration CONFERENCE CO-CHAIRS Stephen Mackwell, Lunar and Planetary Institute Eileen Stansbery, NASA Johnson Space Center PROGRAM COMMITTEE CHAIRS David Draper, NASA Johnson Space Center Walter Kiefer, Lunar and Planetary Institute PROGRAM COMMITTEE P. Doug Archer, NASA Johnson Space Center Nicolas LeCorvec, Lunar and Planetary Institute Katherine Bermingham, University of Maryland Yo Matsubara, Smithsonian Institute Janice Bishop, SETI and NASA Ames Research Center Francis McCubbin, NASA Johnson Space Center Jeremy Boyce, University of California, Los Angeles Andrew Needham, Carnegie Institution of Washington Lisa Danielson, NASA Johnson Space Center Lan-Anh Nguyen, NASA Johnson Space Center Deepak Dhingra, University of Idaho Paul Niles, NASA Johnson Space Center Stephen Elardo, Carnegie Institution of Washington Dorothy Oehler, NASA Johnson Space Center Marc Fries, NASA Johnson Space Center D. Alex Patthoff, Jet Propulsion Laboratory Cyrena Goodrich, Lunar and Planetary Institute Elizabeth Rampe, Aerodyne Industries, Jacobs JETS at John Gruener, NASA Johnson Space Center NASA Johnson Space Center Justin Hagerty, U.S. Geological Survey Carol Raymond, Jet Propulsion Laboratory Lindsay Hays, Jet Propulsion Laboratory Paul Schenk, -
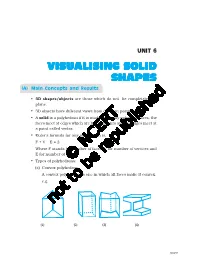
Unit 6 Visualising Solid Shapes(Final)
• 3D shapes/objects are those which do not lie completely in a plane. • 3D objects have different views from different positions. • A solid is a polyhedron if it is made up of only polygonal faces, the faces meet at edges which are line segments and the edges meet at a point called vertex. • Euler’s formula for any polyhedron is, F + V – E = 2 Where F stands for number of faces, V for number of vertices and E for number of edges. • Types of polyhedrons: (a) Convex polyhedron A convex polyhedron is one in which all faces make it convex. e.g. (1) (2) (3) (4) 12/04/18 (1) and (2) are convex polyhedrons whereas (3) and (4) are non convex polyhedron. (b) Regular polyhedra or platonic solids: A polyhedron is regular if its faces are congruent regular polygons and the same number of faces meet at each vertex. For example, a cube is a platonic solid because all six of its faces are congruent squares. There are five such solids– tetrahedron, cube, octahedron, dodecahedron and icosahedron. e.g. • A prism is a polyhedron whose bottom and top faces (known as bases) are congruent polygons and faces known as lateral faces are parallelograms (when the side faces are rectangles, the shape is known as right prism). • A pyramid is a polyhedron whose base is a polygon and lateral faces are triangles. • A map depicts the location of a particular object/place in relation to other objects/places. The front, top and side of a figure are shown. Use centimetre cubes to build the figure. -

OSAA Boys Track & Field Championships
OSAA Boys Track & Field Championships 4A Individual State Champions Through 2006 100-METER DASH 1992 Seth Wetzel, Jesuit ............................................ 1:53.20 1978 Byron Howell, Central Catholic................................. 10.5 1993 Jon Ryan, Crook County ..................................... 1:52.44 300-METER INTERMEDIATE HURDLES 1979 Byron Howell, Central Catholic............................... 10.67 1994 Jon Ryan, Crook County ..................................... 1:54.93 1978 Rourke Lowe, Aloha .............................................. 38.01 1980 Byron Howell, Central Catholic............................... 10.64 1995 Bryan Berryhill, Crater ....................................... 1:53.95 1979 Ken Scott, Aloha .................................................. 36.10 1981 Kevin Vixie, South Eugene .................................... 10.89 1996 Bryan Berryhill, Crater ....................................... 1:56.03 1980 Jerry Abdie, Sunset ................................................ 37.7 1982 Kevin Vixie, South Eugene .................................... 10.64 1997 Rob Vermillion, Glencoe ..................................... 1:55.49 1981 Romund Howard, Madison ....................................... 37.3 1983 John Frazier, Jefferson ........................................ 10.80w 1998 Tim Meador, South Medford ............................... 1:55.21 1982 John Elston, Lebanon ............................................ 39.02 1984 Gus Envela, McKay............................................. 10.55w 1999 -

Convex Polytopes and Tilings with Few Flag Orbits
Convex Polytopes and Tilings with Few Flag Orbits by Nicholas Matteo B.A. in Mathematics, Miami University M.A. in Mathematics, Miami University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Abstract of Dissertation The amount of symmetry possessed by a convex polytope, or a tiling by convex polytopes, is reflected by the number of orbits of its flags under the action of the Euclidean isometries preserving the polytope. The convex polytopes with only one flag orbit have been classified since the work of Schläfli in the 19th century. In this dissertation, convex polytopes with up to three flag orbits are classified. Two-orbit convex polytopes exist only in two or three dimensions, and the only ones whose combinatorial automorphism group is also two-orbit are the cuboctahedron, the icosidodecahedron, the rhombic dodecahedron, and the rhombic triacontahedron. Two-orbit face-to-face tilings by convex polytopes exist on E1, E2, and E3; the only ones which are also combinatorially two-orbit are the trihexagonal plane tiling, the rhombille plane tiling, the tetrahedral-octahedral honeycomb, and the rhombic dodecahedral honeycomb. Moreover, any combinatorially two-orbit convex polytope or tiling is isomorphic to one on the above list. Three-orbit convex polytopes exist in two through eight dimensions. There are infinitely many in three dimensions, including prisms over regular polygons, truncated Platonic solids, and their dual bipyramids and Kleetopes. There are infinitely many in four dimensions, comprising the rectified regular 4-polytopes, the p; p-duoprisms, the bitruncated 4-simplex, the bitruncated 24-cell, and their duals. -
Step 1: 3D Shapes
Year 1 – Autumn Block 3 – Shape Step 1: 3D Shapes © Classroom Secrets Limited 2018 Introduction Match the shape to its correct name. A. B. C. D. E. cylinder square- cuboid cube sphere based pyramid © Classroom Secrets Limited 2018 Introduction Match the shape to its correct name. A. B. C. D. E. cube sphere square- cylinder cuboid based pyramid © Classroom Secrets Limited 2018 Varied Fluency 1 True or false? The shape below is a cone. © Classroom Secrets Limited 2018 Varied Fluency 1 True or false? The shape below is a cone. False, the shape is a triangular-based pyramid. © Classroom Secrets Limited 2018 Varied Fluency 2 Circle the correct name of the shape below. cylinder pyramid cuboid © Classroom Secrets Limited 2018 Varied Fluency 2 Circle the correct name of the shape below. cylinder pyramid cuboid © Classroom Secrets Limited 2018 Varied Fluency 3 Which shape is the odd one out? © Classroom Secrets Limited 2018 Varied Fluency 3 Which shape is the odd one out? The cuboid is the odd one out because the other shapes are cylinders. © Classroom Secrets Limited 2018 Varied Fluency 4 Follow the path of the cuboids to make it through the maze. Start © Classroom Secrets Limited 2018 Varied Fluency 4 Follow the path of the cuboids to make it through the maze. Start © Classroom Secrets Limited 2018 Reasoning 1 The shapes below are labelled. Spot the mistake. A. B. C. cone cuboid cube Explain your answer. © Classroom Secrets Limited 2018 Reasoning 1 The shapes below are labelled. Spot the mistake. A. B. C. cone cuboid cube Explain your answer. -

Summary of Sexual Abuse Claims in Chapter 11 Cases of Boy Scouts of America
Summary of Sexual Abuse Claims in Chapter 11 Cases of Boy Scouts of America There are approximately 101,135sexual abuse claims filed. Of those claims, the Tort Claimants’ Committee estimates that there are approximately 83,807 unique claims if the amended and superseded and multiple claims filed on account of the same survivor are removed. The summary of sexual abuse claims below uses the set of 83,807 of claim for purposes of claims summary below.1 The Tort Claimants’ Committee has broken down the sexual abuse claims in various categories for the purpose of disclosing where and when the sexual abuse claims arose and the identity of certain of the parties that are implicated in the alleged sexual abuse. Attached hereto as Exhibit 1 is a chart that shows the sexual abuse claims broken down by the year in which they first arose. Please note that there approximately 10,500 claims did not provide a date for when the sexual abuse occurred. As a result, those claims have not been assigned a year in which the abuse first arose. Attached hereto as Exhibit 2 is a chart that shows the claims broken down by the state or jurisdiction in which they arose. Please note there are approximately 7,186 claims that did not provide a location of abuse. Those claims are reflected by YY or ZZ in the codes used to identify the applicable state or jurisdiction. Those claims have not been assigned a state or other jurisdiction. Attached hereto as Exhibit 3 is a chart that shows the claims broken down by the Local Council implicated in the sexual abuse. -
Science Training History of the Apollo Astronauts William C
NASA/SP-2015-626 Science Training History of the Apollo Astronauts William C. Phinney National Aeronautics and Space Administration Apollo 17 crewmembers Gene Cernan and Harrison Schmitt conducting a practice EVA in the southern Nevada Volcanic Field near Tonopah, NV (NASA Photograph AS17-S72-48930). ii NASA/SP-2015-626 Science Training History of the Apollo Astronauts William C. Phinney National Aeronautics and Space Administration Cover photographs: From top: Apollo 13 Commander (CDR) James Lovell, left, and Lunar Module Pilot (LMP) Fred Haise during a geologic training trip to Kilbourne Hole, NM, November 1969 (NASA Photography S69- 25199); (Center) Apollo 16 LMP Charles Duke (left) and CDR John W. Young (right) during a practice EVA at Sudbury Crater, Ontario, Canada, July 1971 (NASA Photograph AS16-S71-39840); Apollo 17 LMP Harrison Schmitt (left) and CDR Eugene Cernan (right) during a practive EVA at Lunar Crater Volcanic Field, Tonopah, Nevada, September 1972 (NASA Photograph AS17-S72-48895); Apollo 15 CDR David Scott (left) and James Irwin (right) during practice geologic EVA training at the Rio Grande Gorge, Taos, NM, March 1971 (NASA Photograph AS15-S71-23773) iv ACKNOWLEDGEMENTS When I retired from NASA several of my coworkers, particularly Dave McKay and Everett Gibson, suggested that, given my past role as the coordinator for the science training of the Apollo astronauts, I should put together a history of what was involved in that training. Because it had been nearly twenty-five years since the end of Apollo they pointed out that many of the persons involved in that training might not be around when advice might be sought for future missions of this type. -

A Method for Predicting Multivariate Random Loads and a Discrete Approximation of the Multidimensional Design Load Envelope
International Forum on Aeroelasticity and Structural Dynamics IFASD 2017 25-28 June 2017 Como, Italy A METHOD FOR PREDICTING MULTIVARIATE RANDOM LOADS AND A DISCRETE APPROXIMATION OF THE MULTIDIMENSIONAL DESIGN LOAD ENVELOPE Carlo Aquilini1 and Daniele Parisse1 1Airbus Defence and Space GmbH Rechliner Str., 85077 Manching, Germany [email protected] Keywords: aeroelasticity, buffeting, combined random loads, multidimensional design load envelope, IFASD-2017 Abstract: Random loads are of greatest concern during the design phase of new aircraft. They can either result from a stationary Gaussian process, such as continuous turbulence, or from a random process, such as buffet. Buffet phenomena are especially relevant for fighters flying in the transonic regime at high angles of attack or when the turbulent, separated air flow induces fluctuating pressures on structures like wing surfaces, horizontal tail planes, vertical tail planes, airbrakes, flaps or landing gear doors. In this paper a method is presented for predicting n-dimensional combined loads in the presence of massively separated flows. This method can be used both early in the design process, when only numerical data are available, and later, when test data measurements have been performed. Moreover, the two-dimensional load envelope for combined load cases and its discretization, which are well documented in the literature, are generalized to n dimensions, n ≥ 3. 1 INTRODUCTION The main objectives of this paper are: 1. To derive a method for predicting multivariate loads (but also displacements, velocities and accelerations in terms of auto- and cross-power spectra, [1, pp. 319-320]) for aircraft, or parts of them, subjected to a random excitation. -

Optimization of Tensegrity Lattice with Truncated Octahedral Units
OptimizationM. Ohsaki, J. Y. of Zhang, tensegrity K. Kogiso lattice andwith J. truncated J. Rimoli octahedral units Proceedings of the IASS Annual Symposium 2019 – Structural Membranes 2019 Form and Force 7 – 10 October 2019, Barcelona, Spain C. Lázaro, K.-U. Bletzinger, E. Oñate (eds.) Optimization of tensegrity lattice with truncated octahedral units Makoto OHSAKI∗a, Jingyao ZHANGa, Kosuke KOGISOa, Julian J. RIMOLIc *aDepartment of Architecture and Architectural Engineering, Kyoto University Kyoto-Daigaku Katsura, Nishikyo, Kyoto 615-8540, Japan [email protected] b School of Aerospace Engineering, Georgia Institute of Technology, Atlanta, GA 30332, USA Abstract An optimization method is presented for tensegrity lattices composed of eight truncated octahedral units. The stored strain energy under specified forced vertical displacement is maximized under constraint on the structural material volume. The nonlinear behavior of bars allowing buckling is modeled as a bi- linear elastic material. As a result of optimization, a flexible structure with degrading vertical stiffness is obtained to be applicable to an energy absorption device or a vertical isolation system. Keywords: tensegrity, optimization, strain energy, truncated octahedral unit 1. Introduction Tensegrity structures are a class of self-standing pin jointed structures consisting of thin bars (struts) and cables stiffened by applying prestresses to their members [1, 3]. Because the bars are not continuously connected, i.e., they are topologically isolated from each other, these structures are usually too flexible to be used as load-resisting components of structures in mechanical and civil engineering applications. However, by exploiting their flexibility, tensegrity structures can be utilized as devices for reducing impact forces, isolating dynamic forces, and absorbing energy, to name a few applications [5]. -

19. Three-Dimensional Figures
19. Three-Dimensional Figures Exercise 19A 1. Question Write down the number of faces of each of the following figures: A. Cuboid B. Cube C. Triangular prism D. Square pyramid E. Tetrahedron Answer A. 6 Face is also known as sides. A Cuboid has six faces. Book, Matchbox, Brick etc. are examples of Cuboid. B.6 A Cube has six faces and all faces are equal in length. Sugar Cubes, Dice etc. are examples of Cube. C. 5 A Triangular prism has two triangular faces and three rectangular faces. D. 5 A Square pyramid has one square face as a base and four triangular faces as the sides. So, Square pyramid has total five faces. E. 4 A Tetrahedron (Triangular Pyramid) has one triangular face as a base and three triangular faces as the sides. So, Tetrahedron has total four faces. 2. Question Write down the number of edges of each of the following figures: A. Tetrahedron B. Rectangular pyramid C. Cube D. Triangular prism Answer A. 6 A Tetrahedron has six edges. OA, OB, OC, AB, AC, BC are the 6 edges. B. 8 A Rectangular Pyramid has eight edges. AB, BC, CD, DA, OA, OB, DC, OD are the 8 edges. C. 12 A Cube has twelve edges. AB, BC, CD, DA, EF, FG, GH, HE, AE, DH, BF, CG are the edges. D. 9 A Triangular prism has nine edges. AB, BC, CA, DE, EF, FD, AD, BE, CF are the9 edges. 3. Question Write down the number of vertices of each of the following figures: A.