2008 Advanced Vehicle Technology Analysis and Evaluation Activities
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

List of Vehicle Owners Clubs
V765/1 List of Vehicle Owners Clubs N.B. The information contained in this booklet was correct at the time of going to print. The most up to date version is available on the internet website: www.gov.uk/vehicle-registration/old-vehicles 8/21 V765 scheme How to register your vehicle under its original registration number: a. Applications must be submitted on form V765 and signed by the keeper of the vehicle agreeing to the terms and conditions of the V765 scheme. A V55/5 should also be filled in and a recent photograph of the vehicle confirming it as a complete entity must be included. A FEE IS NOT APPLICABLE as the vehicle is being re-registered and is not applying for first registration. b. The application must have a V765 form signed, stamped and approved by the relevant vehicle owners/enthusiasts club (for their make/type), shown on the ‘List of Vehicle Owners Clubs’ (V765/1). The club may charge a fee to process the application. c. Evidence MUST be presented with the application to link the registration number to the vehicle. Acceptable forms of evidence include:- • The original old style logbook (RF60/VE60). • Archive/Library records displaying the registration number and the chassis number authorised by the archivist clearly defining where the material was taken from. • Other pre 1983 documentary evidence linking the chassis and the registration number to the vehicle. If successful, this registration number will be allocated on a non-transferable basis. How to tax the vehicle If your application is successful, on receipt of your V5C you should apply to tax at the Post Office® in the usual way. -
Electric Vehicle Pre-Infrastructure Planning a Discussion of Social, Economic, and Technological Readiness of Prince Edward Island
University of Prince Edward Island Electric Vehicle Pre-Infrastructure Planning A Discussion of Social, Economic, and Technological Readiness of Prince Edward Island Georgina Vardy 10/22/2012 A localized study, focused on Prince Edward Island, Canada, compiled to assist with determining social, economic and technological readiness for electric vehicles and the related infrastructure. The study used both a Christensen based disruptive technology framework approach and traditional marketing techniques to determine social and economic readiness. Residents showed an interest and aptitude for the social changes required however the financial affordability of the electric vehicles for residents was limited without nationally available, but locally deficient, incentives. A technology scan determined that electric vehicle battery chemical content and design are determining factors in effectively satisfying social needs and acceptance. The next stage includes localized marketing development for this unique location, vehicles sales and infrastructure. PERMISSION TO USE SIGNATURE PROJECT REPORT Title of Signature Project: Electric Vehicle Pre-Infrastructure Planning: A Discussion of Social, Economic, and Technological Readiness of Prince Edward Island Name of Author: Georgina Vardy Department: School of Business Degree: Master of Business Administration Year: 2012 Name of Supervisor(s): Tim Carroll In presenting this signature project report in partial fulfilment of the requirements for a Master of Business Administration degree from the University of Prince Edward Island, the author has agreed that the Robertson Library, University of Prince Edward Island, may make this signature project freely available for inspection and gives permission to add an electronic version of the signature project to the Digital Repository at the University of Prince Edward Island. -

Comment 1 for ZEV 2008 (Zev2008) - 45 Day
Comment 1 for ZEV 2008 (zev2008) - 45 Day. First Name: Jim Last Name: Stack Email Address: [email protected] Affiliation: Subject: ZEV vehicles Comment: The only true ZEV vehicles are pure electric that chanrge on renewables Today 96% of the hydrogen is made from fossil fuels. This can be improved on but will take a long time. Today we already have very good Electric Vehicles liek the RAV4 with NiMH batteries that have lasted over 100,000 miles. Too bad Toyota stopped making it. We also have the Tesla and Ebox. Please do what is right. Jim Attachment: Original File Name: Date and Time Comment Was Submitted: 2008-02-16 11:19:59 No Duplicates. Comment 2 for ZEV 2008 (zev2008) - 45 Day. First Name: Star Last Name: Irvine Email Address: [email protected] Affiliation: NEV Owner Subject: MSV in ZEV regulations Comment: I as a NEV owner (use my OKA NEV ZEV about 3,000 miles annually) would like to see MSV (Medium Speed Vehicles) included in ZEV mandate so they can be available in California. I own two other vehicles FORD FOCUS and FORD Crown Vic. I my OKA NEV could go 35 MPH I would drive it at least twice as much as I currently do, and I would feel much safer doing so. 25 MPH top speed for NEV seriously limits its use and practicality for every day commuting. Attachment: Original File Name: Date and Time Comment Was Submitted: 2008-02-19 23:07:01 No Duplicates. Comment 3 for ZEV 2008 (zev2008) - 45 Day. First Name: Miro Last Name: Kefurt Email Address: [email protected] Affiliation: OKA AUTO USA Subject: MSV definition and inclusion in ZEV 2008 Comment: We believe that it is important that the ZEV regulations should be more specific in definition of "CITY" ZEV as to its capabilities and equipment. -

Mode and Implementation of a Hybrid Control System for a 2-Mode Hybrid Electric Vehicle Zhenhua Zhu West Virginia University
Graduate Theses, Dissertations, and Problem Reports 2013 Mode and implementation of a hybrid control system for a 2-mode hybrid electric vehicle zhenhua Zhu West Virginia University Follow this and additional works at: https://researchrepository.wvu.edu/etd Part of the Electro-Mechanical Systems Commons, and the Navigation, Guidance, Control, and Dynamics Commons Recommended Citation Zhu, zhenhua, "Mode and implementation of a hybrid control system for a 2-mode hybrid electric vehicle" (2013). Graduate Theses, Dissertations, and Problem Reports. 8162. https://researchrepository.wvu.edu/etd/8162 This Dissertation is protected by copyright and/or related rights. It has been brought to you by the The Research Repository @ WVU with permission from the rights-holder(s). You are free to use this Dissertation in any way that is permitted by the copyright and related rights legislation that applies to your use. For other uses you must obtain permission from the rights-holder(s) directly, unless additional rights are indicated by a Creative Commons license in the record and/ or on the work itself. This Dissertation has been accepted for inclusion in WVU Graduate Theses, Dissertations, and Problem Reports collection by an authorized administrator of The Research Repository @ WVU. For more information, please contact [email protected]. MODE AND IMPLEMENTATION OF A HYBRID CONTROL SYSTEM FOR A 2-MODE HYBRID ELECTRIC VEHICLE Zhenhua Zhu Dissertation submitted To the Benjamin M. Statler College of Engineering and Mineral Resources at West Virginia University in partial fulfillment of the requirements for the degree of Doctor of Philosophy in Department of Mechanical Engineering Scott Wayne, Ph.D., Chair Nigel Clark, Ph.D. -

Hydrogen Fuel Cell Vehicles in Tunnels
SAND2020-4507 R Hydrogen Fuel Cell Vehicles in Tunnels Austin M. Glover, Austin R. Baird, Chris B. LaFleur April 2020 Sandia National Laboratories is a multimission laboratory managed and operated by National Technology and Engineering Solutions of Sandia, LLC, a wholly owned subsidiary of Honeywell International Inc., for the U.S. Department of Energy’s National Nuclear Security Administration under contract DE-NA0003525. 2 ABSTRACT There are numerous vehicles which utilize alternative fuels, or fuels that differ from typical hydrocarbons such as gasoline and diesel, throughout the world. Alternative vehicles include those running on the combustion of natural gas and propane as well as electrical drive vehicles utilizing batteries or hydrogen as energy storage. Because the number of alternative fuels vehicles is expected to increase significantly, it is important to analyze the hazards and risks involved with these new technologies with respect to the regulations related to specific transport infrastructure, such as bridges and tunnels. This report focuses on hazards presented by hydrogen fuel cell electric vehicles that are different from traditional fuels. There are numerous scientific research and analysis publications on hydrogen hazards in tunnel scenarios; however, compiling the data to make conclusions can be a difficult process for tunnel owners and authorities having jurisdiction over tunnels. This report provides a summary of the available literature characterizing hazards presented by hydrogen fuel cell electric vehicles, including light-duty, medium and heavy-duty, as well as buses. Research characterizing both worst-case and credible scenarios, as well as risk-based analysis, is summarized. Gaps in the research are identified to guide future research efforts to provide a complete analysis of the hazards and recommendations for the safe use of hydrogen fuel cell electric vehicles in tunnels. -

Idaho Power Plan, Nov 1 2019
LISA D. NORDSTROM Lead Counsel [email protected] November 1, 2019 Public Utility Commission of Oregon Filing Center 201 High Street SE, Suite 100 P.O. Box 1088 Salem, Oregon 97301 RE: UM ___ – Idaho Power Company’s Application for Transportation Electrification Plan Attention Filing Center: Pursuant to OAR 860-087-0020, Idaho Power Company (“Idaho Power” or “Company”) submits the enclosed Transportation Electrification Plan (“TE Plan”) for acceptance by the Public Utility Commission of Oregon (“Commission”). Idaho Power’s TE Plan contains the Company’s long-term strategy to accelerate TE in its Oregon service area. Given the current state of the TE market in Idaho Power’s Oregon service area, the Company’s TE Plan is largely focused on improving the visibility and awareness of electric vehicles (“EV”). Through education and awareness, Idaho Power aims to accelerate TE by contributing to increased adoption of EVs, and access to electricity as a form of transportation fuel. Idaho Power respectfully requests that the Commission issue an order finding that the Company’s TE Plan meets the requirements of OAR 860-087-0020. The Company also requests that the Commission waive (per OAR 860-087-0001) OAR 860-087-0020(2)(d), which requires Idaho Power to present its TE Plan at a public meeting, if the Commission finds that presentation of the Company’s modest TE Plan, reflecting the limited EV penetration in its Oregon service area, would not materially benefit the Commission. It is respectfully requested that all formal data requests to the Company regarding this filing be addressed to the following: By email (preferred): [email protected] By regular mail: Lisa Nordstrom Lead Counsel Idaho Power Company 1221 W. -

Comparison of Hydrogen Powertrains with the Battery Powered Electric Vehicle and Investigation of Small-Scale Local Hydrogen Production Using Renewable Energy
Review Comparison of Hydrogen Powertrains with the Battery Powered Electric Vehicle and Investigation of Small-Scale Local Hydrogen Production Using Renewable Energy Michael Handwerker 1,2,*, Jörg Wellnitz 1,2 and Hormoz Marzbani 2 1 Faculty of Mechanical Engineering, University of Applied Sciences Ingolstadt, Esplanade 10, 85049 Ingolstadt, Germany; [email protected] 2 Royal Melbourne Institute of Technology, School of Engineering, Plenty Road, Bundoora, VIC 3083, Australia; [email protected] * Correspondence: [email protected] Abstract: Climate change is one of the major problems that people face in this century, with fossil fuel combustion engines being huge contributors. Currently, the battery powered electric vehicle is considered the predecessor, while hydrogen vehicles only have an insignificant market share. To evaluate if this is justified, different hydrogen power train technologies are analyzed and compared to the battery powered electric vehicle. Even though most research focuses on the hydrogen fuel cells, it is shown that, despite the lower efficiency, the often-neglected hydrogen combustion engine could be the right solution for transitioning away from fossil fuels. This is mainly due to the lower costs and possibility of the use of existing manufacturing infrastructure. To achieve a similar level of refueling comfort as with the battery powered electric vehicle, the economic and technological aspects of the local small-scale hydrogen production are being investigated. Due to the low efficiency Citation: Handwerker, M.; Wellnitz, and high prices for the required components, this domestically produced hydrogen cannot compete J.; Marzbani, H. Comparison of with hydrogen produced from fossil fuels on a larger scale. -

Fibre Reinforced Plastic Concepts for Structural Chassis Parts
Transport Research Arena 2014, Paris Fibre Reinforced Plastic Concepts for Structural Chassis Parts Oliver Deisser*, Prof. Dr. Horst E. Friedrich, Gundolf Kopp German Aerospace Center / Institute of Vehicle Concepts Pfaffenwaldring 38-40, 70569 Stuttgart Abstract Fibre reinforced plastics (FRP) have a high potential for reducing masses of automotive parts, but are seldom used for structural parts in the chassis. If the whole chassis concept is adapted to the new material, then a high weight saving potential can be gained and new body concepts can result. DLR Institute of Vehicle Concepts designed and dimensioned a highly stressed structural part in FRP. A topology optimisation of a defined working space with the estimated loads was performed. The results were analysed and fibre reinforced part concepts derived, detailed and evaluated. Especially by the use of the new FRP material system in the chassis area, a weight saving of more than 30% compared to the steel reference was realised. With the help of those concepts it is shown, that there is also a great weight saving potential in the field of chassis design, if the design fits with the material properties. The existing concepts still have to be detailed further, simulated and validated to gain the full lightweight potential. Keywords: Fibre Reinforced Plastics; Chassis Design; Lightweight Design Concepts; Finite Element Simulation; FEM. Résumé Plastiques renforcés de fibres (PRF) ont un fort potentiel de réduction des masses de pièces automobiles, mais sont rarement utilisés pour des pièces de structure du châssis. Si le concept de châssis est adapté au nouveau matériel, un potentiel élevé d'épargne de poids peut être acquis et de nouveaux concepts de construction peuvent en résulter. -

Specialty Tools Brake Tools
Specialty Tools SPECIALTY TOOLS • Includes sizes T-40, T-45, T-50. • All Torxbits are made of heat-treated alloy steel. 27740 - 3 pc. set includes T-40, T-45, T-50 sizes BRAKE TOOLS for servicing disc brakes fitting GM and Ford brake caliper Torx bolts. • 3-Stone Hone Fits Cylinders to 2" (21.4-50.8mm). • Available Individually: 26620 T-40 3/8" drive, 26630 T-45 3/8" drive, 26640 T-50 3/8" drive • Controlled pressure makes it possible to polish or hone with just one stone grit. Square ends of stones hone to the end in Lisle Brake Caliper Torx Bit Set LST 27740 step-cut and blind-end cylinders. 240 grit stones are 1 1/8" long. Flexible driver. • # 10050 Replacement Stones • Hardened alloy steel bits. Lisle Brake Cylinder Hone LST 10000 • Professional sand finish. • Sizes: T40, T45 & T50. Performance Tool 3 Pc Brake Caliper Star Bit Set • 2-Stone Hone Fits Cylinders 11/16" to 2 1/2" (17.4 - 63.5mm). WIL W1337 • Controlled pressure makes it possible to polish or hone with just one stone grit. Square ends of stones hone to the end in step-cut and blind-end cylinders. 240 grit stones are • Hangs the Disc Brake Caliper Out of the Way During Service While 1-1/8" long. Flexible driver. Keeping Tension Off the Brake Line. • # 10550 Replacement Stones • Helps prevent damage to calipers and lines when servicing brakes, Lisle Brake Cylinder Hone LST 10500 suspension, hubs and more. • Overall length of 9" for hanging the disc brake caliper out of the way while keeping tension off the brake line. -
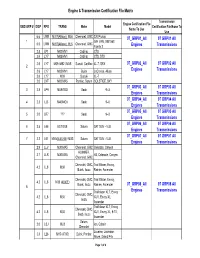
07 GRP03 All Engines 07 GRP03 All Transmissions 07 GRP04 All
Engine & Transmission Certification File Matrix Transmission Engine Certification File OBD GRP # DISP RPO TRANS Make Model Certification File Name To Name To Use Use 6.6 LMM MW7(Allison), ML6 Chevrolet, GMC C/K Pickup 07_GRP01_All 07 GRP01 All 1 G/H VAN, GMT560 6.6 LMM MW7(Allison), ML6 Chevrolet, GMC Family 2 Engines Transmissions 2.8 LP1 M82/MV1 Cadillac CTS 3.6 LY7 M82/MV1 Cadillac CTS, STS 3.6 LY7 M09 /M82 / MX5 Suzuki, Cadillac XL-7, SRX 07_GRP02_All 07 GRP02 All 2 3.6 LY7 M82/MV1 Buick LaCrosse, Allure Engines Transmissions 3.6 LY7 M09 Suzuki XL-7 2.0 LNF M82/MA5 Pontiac, Saturn SOLSTICE, SKY 07_GRP03_All 07 GRP03 All 3 2.8 LP9 MU9/TBD Saab 9--3 Engines Transmissions 07_GRP04_All 07 GRP04 All 4 2.3 LJ3 M45/MC6 Saab 9--5 Engines Transmissions 07_GRP05_All 07 GRP05 All 5 2.0 LR7 ??? Saab 9--3 Engines Transmissions 07_GRP06_All 07 GRP06 All 6 3.5 L66 MJ7/MJ8 Saturn SAT SUV - VUE Engines Transmissions 07_GRP07_All 07 GRP07 All 7 2.2 L61 MN5(5L40/45)/ MG3 Saturn SAT SUV - VUE Engines Transmissions 2.9 LLV M30/MA5 Chevrolet, GMC Colorado, Canyon HUMMER, 3.7 LLR M30/MA5 H3, Colorado, Canyon Chevrolet, GMC Chevrolet, GMC, Trail Blazer, Envoy, 4.2 LL8 M30 Buick, Isuzu Rainier, Ascender Chevrolet, GMC, Trail Blazer, Envoy, 4.2 LL8 M30 (4L60E) Buick, Isuzu Rainier, Ascender 07_GRP08_All 07 GRP08 All 8 Trailblazer XLT, Envoy Engines Transmissions Chevrolet, GMC, 4.2 LL8 M30 XUV, Envoy XL, Isuzu Ascender Trailblazer XLT, Envoy Chevrolet, GMC, 4.2 LL8 M30 XUV, Envoy XL, 9-7X, Saab, Isuzu Ascender Saturn, 2.0 LSJ MU3 Ion, Cobalt Chevrolet Lucerne, -
Autonomous Vehicle Engineering Guide Top Breakthroughs & Resources in Autonomous and Connected Vehicles AUTONOMOUS VEHICLE ENGINEERING GUIDE
EBOOK Autonomous Vehicle Engineering Guide Top Breakthroughs & Resources in Autonomous and Connected Vehicles AUTONOMOUS VEHICLE ENGINEERING GUIDE 5 Contents SENSORS 7 3 For Lidar, MEMs the Word 5 New Performance Metrics for Lidar 7 Detecting Pedestrians SOFTWARE AND AI/MACHINE LEARNING 12 9 Software Building Blocks for AV Systems 12 New Mobility’s Mega Mappers 15 Can Autonomous Vehicles Make the Right ‘Decision?’ 19 CONNECTED VEHICLE ELECTRONICS 17 Expanding the Role of FPGAs 19 Electronic Architectures Get Smart ABOUT ON THE COVER Autonomous Vehicle Engineering covers the In the article Software Building Blocks constantly-evolving field of autonomous and for AV Systems, Sebastian Klaas explores connected vehicles from end to end — covering how Elektrobit's unique software frame- key technologies and applications including work is designed to smooth develop- sensor fusion, artificial intelligence, smart cities, ment of automated driving functions. and much more. This Autonomous Vehicle Automated valet parking is an example Engineering Ebook is a compilation of some of of a practical application of the software the magazine's top feature articles from thought framework. Read more on page 9. leaders, and is your guide to designing the next (Image: Elektrobit) generation of vehicles. 2 AUTONOMOUS VEHICLE ENGINEERING SAE EBOOK SENSORS For Lidar, MEMS the Word by Charles Chung, Ph.D. Tiny gimballed mirrors on chips are being developed that could improve the form factor and cost of automotive lidar. As automakers and their technology partners develop lidar sensors to enable SAE Level 4-5 autonomous driving, some systems designers believe MEMS micromirrors have the potential to reduce overall size and cost—two major hurdles to widespread lidar adoption. -

The Electric Vehicle Evolution
THE ELECTRIC VEHICLE EVOLUTION Electric vehicles are a growing market for new car purchases with more and more people making the switch from the gas station to an electrical outlet to fuel their vehicles. Electric vehicles use electricity as their primary fuel or use electricity along with a conventional engine to improve efficiency (plug-in hybrid vehicles). Drivers are purchasing the vehicles for all kinds of reasons. Many decide to buy when they hear about the savings. Drivers see around $700 in savings a year in gasoline expenses when they drive an average of 12,000 miles. They also can realize substantial tax credits that encourage low-emission and emissions-free driving. Additional benefits include environmental improvements because of reduced vehicle emissions, energy independence by way of using locally-generated electricity and high quality driving performance. With the influx of electric vehicles comes a need for charging infrastructure. Throughout the country, businesses, governments and utilities have been installing electric vehicle charging stations. According to the U.S. Department of Energy’s Alternative Fuels Data Center, there are over tens of thousands of vehicle charging outlets across the country. This trend toward electric vehicles is expected to continue, especially with the billions of dollars that auto manufacturers are investing in these new vehicles. The list of manufacturer support is long with almost every large automobile manufacturer currently developing or selling an electric vehicle. But how and why did this all get started? Let’s step back and take a look at the history of electric transportation. 1 THE ELECTRIC VEHICLE EVOLUTION EARLY SUCCESS Electric vehicles actually have their origin in the 1800s.