Appearance-Based Image Splitting for HDR Display Systems Dan Zhang
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Khronos Data Format Specification
Khronos Data Format Specification Andrew Garrard Version 1.2, Revision 1 2019-03-31 1 / 207 Khronos Data Format Specification License Information Copyright (C) 2014-2019 The Khronos Group Inc. All Rights Reserved. This specification is protected by copyright laws and contains material proprietary to the Khronos Group, Inc. It or any components may not be reproduced, republished, distributed, transmitted, displayed, broadcast, or otherwise exploited in any manner without the express prior written permission of Khronos Group. You may use this specification for implementing the functionality therein, without altering or removing any trademark, copyright or other notice from the specification, but the receipt or possession of this specification does not convey any rights to reproduce, disclose, or distribute its contents, or to manufacture, use, or sell anything that it may describe, in whole or in part. This version of the Data Format Specification is published and copyrighted by Khronos, but is not a Khronos ratified specification. Accordingly, it does not fall within the scope of the Khronos IP policy, except to the extent that sections of it are normatively referenced in ratified Khronos specifications. Such references incorporate the referenced sections into the ratified specifications, and bring those sections into the scope of the policy for those specifications. Khronos Group grants express permission to any current Promoter, Contributor or Adopter member of Khronos to copy and redistribute UNMODIFIED versions of this specification in any fashion, provided that NO CHARGE is made for the specification and the latest available update of the specification for any version of the API is used whenever possible. -

Painting with Light: a Technical Overview of Implementing HDR Support in Krita
Painting with Light: A Technical Overview of Implementing HDR Support in Krita Executive Summary Krita, a leading open source application for artists, has become one of the first digital painting software to achieve true high dynamic range (HDR) capability. With more than two million downloads per year, the program enables users to create and manipulate illustrations, concept art, comics, matte paintings, game art, and more. With HDR, Krita now opens the door for professionals and amateurs to a vastly extended range of colors and luminance. The pioneering approach of the Krita team can be leveraged by developers to add HDR to other applications. Krita and Intel engineers have also worked together to enhance Krita performance through Intel® multithreading technology, while Intel’s built-in support of HDR provides further acceleration. This white paper gives a high-level description of the development process to equip Krita with HDR. A Revolution in the Display of Color and Brightness Before the arrival of HDR, displays were calibrated to comply with the D65 standard of whiteness, corresponding to average midday light in Western and Northern Europe. Possibilities of storing color, contrast, or other information about each pixel were limited. Encoding was limited to a depth of 8 bits; some laptop screens only handled 6 bits per pixel. By comparison, HDR standards typically define 10 bits per pixel, with some rising to 16. This extra capacity for storing information allows HDR displays to go beyond the basic sRGB color space used previously and display the colors of Recommendation ITU-R BT.2020 (Rec. 2020, also known as BT.2020). -

Optimized RGB for Image Data Encoding
Journal of Imaging Science and Technology® 50(2): 125–138, 2006. © Society for Imaging Science and Technology 2006 Optimized RGB for Image Data Encoding Beat Münch and Úlfar Steingrímsson Swiss Federal Laboratories for Material Testing and Research (EMPA), Dübendorf, Switzerland E-mail: [email protected] Indeed, image data originating from digital cameras and Abstract. The present paper discusses the subject of an RGB op- scanners are highly device dependent, and the same variabil- timization for color data coding. The current RGB situation is ana- lyzed and those requirements selected which exclusively address ity exists for image reproducing devices such as monitors the data encoding, while disregarding any application or workflow and printers. Figure 1 shows the locations of the primaries related objectives. In this context, the limitation to the RGB triangle for a few important RGB color spaces, revealing a manifold of color saturation, and the discretization due to the restricted reso- lution of 8 bits per channel are identified as the essential drawbacks variety. The respective specifications for the primaries, white of most of today’s RGB data definitions. Specific validation metrics points and gamma values are given in Table I. are proposed for assessing the codable color volume while at the In practice, the problem of RGB misinterpretation has same time considering the discretization loss due to the limited bit resolution. Based on those measures it becomes evident that the been approached by either providing an ICC profile or by idea of the recently promoted e-sRGB definition holds the potential assuming sRGB if no ICC profile is present. -
Recording Devices, Image Creation Reproduction Devices
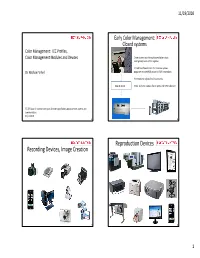
11/19/2010 Early Color Management: Closed systems Color Management: ICC Profiles, Color Management Modules and Devices Drum scanner uses three photomultiplier tubes aadnd typica lly scans a film negative . A fixed transformation for the in‐house system Dr. Michael Vrhel maps the recorded RGB values to CMYK separations. Print operator adjusts final ink amounts. RGB CMYK Note: At‐home, camera film to prints and NTSC television. TC 707 Basis of modern techniques for color specification, measurement, control and communication. 11/17/2010 1 2 Reproduction Devices Recording Devices, Image Creation 3 4 1 11/19/2010 Modern Color Modern Color Communication: Communication: Open systems. Open systems. Profile Connection Space (PCS) e.g. CIELAB, CIEXYZ or sRGB 5 6 Modern Color Communication: Open Standards, Standards, Standards.. Systems. Printing Industry: ICC profile as an ISO standard Postscript color management was the first adopted solution providing a connection ISO 15076‐1:2005 Image technology colour management Space 1990 in PostScript Level 2. Architecture, profile format and data structure ‐‐ Part 1: Based on ICC.1:2004‐10 Apple ColorSync was a competing solution introduced in 1993. Camera characterization standards ISO 22028‐1 specifies the image state architecture and encoding requirements. International Color Consortium (ICC) developed a standard that has now been widely ISO 22028‐3 specifies the RIMM, ERIMM (and soon the FP‐RIMM) RGB color encodings. adopted at least by the print industry. Organization founded in 1993 by Adobe, Agfa, IEC/ISO 61966‐2‐2 specifies the scRGB, scYCC, scRGB‐nl and scYCC‐nl color encodings. Kodak, Microsoft, Silicon Graphics, Sun Microsystems and Taligent. -
HDR PROGRAMMING Thomas J
April 4-7, 2016 | Silicon Valley HDR PROGRAMMING Thomas J. True, July 25, 2016 HDR Overview Human Perception Colorspaces Tone & Gamut Mapping AGENDA ACES HDR Display Pipeline Best Practices Final Thoughts Q & A 2 WHAT IS HIGH DYNAMIC RANGE? HDR is considered a combination of: • Bright display: 750 cm/m 2 minimum, 1000-10,000 cd/m 2 highlights • Deep blacks: Contrast of 50k:1 or better • 4K or higher resolution • Wide color gamut What’s a nit? A measure of light emitted per unit area. 1 nit (nt) = 1 candela / m 2 3 BENEFITS OF HDR Improved Visuals Richer colors Realistic highlights More contrast and detail in shadows Reduces / Eliminates clipping and compression issues HDR isn’t simply about making brighter images 4 HUNT EFFECT Increasing the Luminance Increases the Colorfulness By increasing luminance it is possible to show highly saturated colors without using highly saturated RGB color primaries Note: you can easily see the effect but CIE xy values stay the same 5 STEPHEN EFFECT Increased Spatial Resolution More visual acuity with increased luminance. Simple experiment – look at book page indoors and then walk with a book into sunlight 6 HOW HDR IS DELIVERED TODAY High-end professional color grading displays - Dolby Pulsar (4000 nits), Dolby Maui, SONY X300 (1000 nit OLED) UHD TVs - LG, SONY, Samsung… (1000 nits, high contrast, UHD-10, Dolby Vision, etc) Rec. 2020 UHDTV wide color gamut SMPTE ST-2084 Dolby Perceptual Quantizer (PQ) Electro-Optical Transfer Function (EOTF) SMPTE ST-2094 Dynamic metadata specification 7 REAL WORLD VISIBLE -
HDR RENDERING on NVIDIA GPUS Thomas J
HDR RENDERING ON NVIDIA GPUS Thomas J. True, May 8, 2017 HDR Overview Visible Color & Colorspaces NVIDIA Display Pipeline Tone Mapping AGENDA Programing for HDR Best Practices Conclusion Q & A 2 HDR OVERVIEW 3 WHAT IS HIGH DYNAMIC RANGE? HDR is considered a combination of: • Bright display: 750 cm/m 2 minimum, 1000-10,000 cd/m 2 highlights • Deep blacks: Contrast of 50k:1 or better • 4K or higher resolution • Wide color gamut What’s a nit? A measure of light emitted per unit area. 1 nit (nt) = 1 candela / m 2 4 BENEFITS OF HDR Tell a Better Story with Improved Visuals Richer colors Realistic highlights More contrast and detail in shadows Reduces / Eliminates clipping and compression issues HDR isn’t simply about making brighter images 5 HUNT EFFECT Increasing the Luminance Increases the Colorfulness By increasing luminance it is possible to show highly saturated colors without using highly saturated RGB color primaries Note: you can easily see the effect but CIE xy values stay the same 6 STEPHEN EFFECT Increased Spatial Resolution More visual acuity with increased luminance. Simple experiment – look at book page indoors and then walk with a book into sunlight 7 HOW HDR IS DELIVERED TODAY Displays and Connections High-End Professional Color Grading Displays – via SDI • Dolby Pulsar (4000 nits) • Dolby Maui • SONY X300 (1000 nit OLED) • Canon DP-V2420 UHD TVs – via HDMI 2.0a/b • LG, SONY, Samsung… (1000 nits, high contrast, HDR10, Dolby Vision, etc) Desktop Computer Displays – coming soon to a desktop / laptop near you 8 VISIBLE COLOR & -
![Color Image Processing Pipeline [A General Survey of Digital Still Camera Processing]](https://docslib.b-cdn.net/cover/4944/color-image-processing-pipeline-a-general-survey-of-digital-still-camera-processing-2224944.webp)
Color Image Processing Pipeline [A General Survey of Digital Still Camera Processing]
[Rajeev Ramanath, Wesley E. Snyder, Youngjun Yoo, and Mark S. Drew ] FLOWER PHOTO © PHOTO FLOWER MEDIA, 1991 21ST CENTURY PHOTO:CAMERA AND BACKGROUND ©VISION LTD. DIGITAL Color Image Processing Pipeline [A general survey of digital still camera processing] igital still color cameras (DSCs) have gained significant popularity in recent years, with projected sales in the order of 44 million units by the year 2005. Such an explosive demand calls for an understanding of the processing involved and the implementation issues, bearing in mind the otherwise difficult problems these cameras solve. This article presents an overview of the image processing pipeline, Dfirst from a signal processing perspective and later from an implementation perspective, along with the tradeoffs involved. IMAGE FORMATION A good starting point to fully comprehend the signal processing performed in a DSC is to con- sider the steps by which images are formed and how each stage affects the final rendered image. There are two distinct aspects of image formation: one that has a colorimetric perspective and another that has a generic imaging perspective, and we treat these separately. In a vector space model for color systems, a reflectance spectrum r(λ) sampled uniformly in a spectral range [λmin,λmax] interacts with the illuminant spectrum L(λ) to form a projection onto the color space of the camera RGBc as follows: c = N STLMr + n ,(1) where S is a matrix formed by stacking the spectral sensitivities of the K color filters used in the imaging system column-wise, L is -

Computing Chromatic Adaptation
Computing Chromatic Adaptation Sabine S¨usstrunk A thesis submitted for the Degree of Doctor of Philosophy in the School of Computing Sciences, University of East Anglia, Norwich. July 2005 c This copy of the thesis has been supplied on condition that anyone who consults it is understood to recognise that its copyright rests with the author and that no quotation from the thesis, nor any information derived therefrom, may be published without the author’s prior written consent. ii Abstract Most of today’s chromatic adaptation transforms (CATs) are based on a modified form of the von Kries chromatic adaptation model, which states that chromatic adaptation is an independent gain regulation of the three photoreceptors in the human visual system. However, modern CATs apply the scaling not in cone space, but use “sharper” sensors, i.e. sensors that have a narrower shape than cones. The recommended transforms currently in use are derived by minimizing perceptual error over experimentally obtained corresponding color data sets. We show that these sensors are still not optimally sharp. Using different com- putational approaches, we obtain sensors that are even more narrowband. In a first experiment, we derive a CAT by using spectral sharpening on Lam’s corresponding color data set. The resulting Sharp CAT, which minimizes XYZ errors, performs as well as the current most popular CATs when tested on several corresponding color data sets and evaluating perceptual error. Designing a spherical sampling technique, we can indeed show that these CAT sensors are not unique, and that there exist a large number of sensors that perform just as well as CAT02, the chromatic adap- tation transform used in CIECAM02 and the ICC color management framework. -
Linux and High Dynamic Range (HDR) Display XDC 2016 Andy Ritger
Linux and High Dynamic Range (HDR) Display XDC 2016 Andy Ritger 1 Linux and HDR Display Disclaimer • I am not a color expert. • HDR is a broad topic. • NVIDIA has not yet implemented HDR support in our Linux driver, though we have on Windows and Android. • Goal today is to: • Give an overview of the building blocks of HDR from a window system perspective. • Raise awareness of some of the areas of the Linux ecosystem that may require updating for HDR. 2 Linux and HDR Display Ultra High Definition (UHD) Displays Next generation displays aim to produce more realistic images. • Higher pixel resolution ("4k" and "8k"). • Wider color gamut: express a wider range of colors than today. • High Dynamic Range (HDR): express a wider range of luminance than today. 3 Linux and HDR Display Background: ITU-R BT.2020 • ITU-R BT.2020 (aka "Rec. 2020" or "BT.2020") recommends UHD parameters. • This includes recommendations for: • Resolutions. • Refresh rates. • Chromaticity. • Signal formats (RGB 4:4:4, YCbCr 4:2:0, etc). • Digital representation (10- or 12-bit). • Transfer function. • Often, when people say "BT.2020", they mean the BT.2020 color gamut. • BT.2020’s color gamut is the goal; very few displays get close to that today. • Current generation UHD displays are much closer to the DCI-P3 color gamut. 4 Linux and HDR Display Background: Chromaticity • Different color spaces represent different sets of colors (color gamuts). • CIE XYZ color space: • Color primaries X, Y, Z. • Y == luminance. • CIE xy chromaticity diagram: 2D projection of 3D CIE XYZ color space. -

Video Demystified
Video Demystified A Handbook for the Digital Engineer Fifth Edition by Keith Jack AMSTERDAM • BOSTON • HEIDELBERG • LONDON NEW YORK • OXFORD • PARIS • SAN DIEGO SAN FRANCISCO • SINGAPORE • SYDNEY • TOKYO ELSEVIER Newnes is an imprint of Elsevier Newnes Contents About the Author xix chapteri • introduction 1 Contents 3 Standards Organizations 5 Chapter 2 • Introduction to Video 6 Analog vs. Digital 6 Video Data 6 Digital Video 7 Video Timing 7 Video Resolution 9 Standard-Definition 9 Enhanced-Definition 9 High-Definition 11 Audio and Video Compression 11 Application Block Diagrams 11 DVD Players 11 Digital Media Adapters 12 Digital Television Set-Top Boxes 12 v vi Contents chapter 3 • Color Spaces 15 RGB Color Space 15 sRGB 16 scRGB 17 YUV Color Space 17 YIQ Color Space 18 YCbCr Color Space 19 RGB-YCbCr Equations: SDTV 19 RGB-YCbCr Equations: HDTV 20 4:4:4 YCbCr Format 21 4:2:2 YCbCr Format 22 4:1:1 YCbCr Format 22 4:2:0 YCbCr Format 22 xvYCC Color Space 26 PhotoYCC Color Space 26 HSI, HLS, and HSV Color Spaces 27 Chromaticity Diagram 28 Non-RGB Color Space Considerations 32 Gamma Correction 34 Constant Luminance Problem 36 References 36 chapter 4 • Video Signals Overview 37 Digital Component Video Background 37 Coding Ranges 37 480i and 480p Systems 39 576i and 576p Systems 48 720p Systems 56 1080i and 1080p Systems 59 Other Video Systems 64 References 67 / Contents vii chapter 5 • Analog Video Interfaces 68 S-Video Interface 68 SCART Interface 69 SDTVRGB Interface 71 HDTV RGB Interface 75 Constrained Image 77 SDTV YPbPr Interface 77 VBI -

Colour Spaces
Digital Color Image Processing by Andreas Koschan and Mongi Abidi Copyright 0 2008 John Wiley & Sons, Inc. 3 COLOR SPACES AND COLOR DISTANCES Color is a perceived phenomenon and not a physical dimension like length or temperature, although the electromagnetic radiation of the visible wavelength spectrum is measurable as a physical quantity. The observer can perceive two differing color sensations wholly as equal or as metameric (see Section 2.2). Color identification through data of a spectrum is not useful for labeling colors that, as also in image processing, are physiologically measured and evaluated for the most part with a very small number of sensors. A suitable form of representation must be found for storing, displaying, and processing color images. This representation must be well suited to the mathematical demands of a color image processing algorithm, to the technical conditions of a camera, printer, or monitor, and to human color perception as well. These various demands cannot be met equally well simultaneously. For this reason, differing representations are used in color image processing according to the processing goal. Color spaces indicate color coordinate systems in which the image values of a color image are represented. The difference between two image values in a color space is called color distance. The numbers that describe the different color distances in the respective color model are as a rule not identical to the color differences perceived by humans. In the following, the standard color system XYZ, established by the International Lighting Commission CIE (Commission Internationale de I ’Eclairage), will be described. This system represents the international reference system of color measurement. -
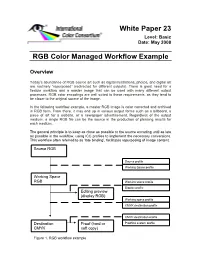
White Paper 23 RGB Color Managed Workflow Example
White Paper 23 Level: Basic Date: May 2008 RGB Color Managed Workflow Example Overview Today’s abundance of RGB source art such as digital illustrations, photos, and digital art are routinely “repurposed” (redirected for different outputs). There is great need for a flexible workflow and a master image that can be used with many different output processes. RGB color encodings are well suited to these requirements, as they tend to be closer to the original source of the image. In the following workflow example, a master RGB image is color corrected and archived in RGB form. From there, it may end up in various output forms such as a billboard, a piece of art for a website, or a newspaper advertisement. Regardless of the output medium, a single RGB file can be the source in the production of pleasing results for each medium. The general principle is to keep as close as possible to the source encoding until as late as possible in the workflow, using ICC profiles to implement the necessary conversions. This workflow often referred to as ‘late binding’, facilitates repurposing of image content. Source RGB Source profile Working Space profile Working Space RGB Working space profile Display profile Editing preview (display RGB) Working space profile CMYK destination profile CMYK destination profile Destination Proof (hard or Proofing system profile CMYK soft copy) Figure 1. RGB workflow example Prerequisites To achieve an accurate and efficient RGB workflow, each color device in the workflow must be calibrated. This is a process by which a device is returned to known color conditions.