Prototype Design and Mission Analysis for a Small Satellite Exploiting Environmental Disturbances for Attitude Stabilization
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Amateur-Satellite Service
Amateur-Satellite Service 1 26/11/2012 Some facts about the amateur-satellite service • Began in 1961 • Pioneered low-cost satellite technology • First privately funded space satellites • First satellite search & rescue (OSCAR 6 & 7) • First inter-satellite transmissions • Early tele-medicine transmissions • Pioneered distributed engineering 2 26/11/2012 Amateur-satellite organizations (by country) • Argentina AMSAT-LU • Australia AMSAT-Australia • Austria AMSAT-OE • Bermuda AMSAT-BDA • Brazil BRAMSAT • Chile AMSAT-CE • Denmark AMSAT-OZ • Germany AMSAT-DL • Finland AMSAT-OH • France AMSAT-France • Israel AMSAT-Israel • Italy AMSAT-Italia 3 26/11/2012 Amateur-satellite organizations (by country)…continued • Korea KITSAT Project • Mexico AMSAT-Mexico • New Zealand AMSAT-ZL • Qatar AMSAT-Qatar • Japan JAMSAT • North America AMSAT-NA • Russia AMSAT-R • South Africa AMSAT-SA • Spain AMSAT-URE • Sweden AMSAT-Sweden • United Kingdom AMSAT-UK • USA, Canada AMSAT-NA 4 26/11/2012 Co-operation with universities to develop & construct amateur-satellites Amateur satellites have been designed and constructed by university students with the help of local amateurs and amateur-satellite organizations. Some examples: ◊ Stellenbosch University (South Africa) ◊ University of Surrey (UK) ◊ University of Mexico ◊ Weber State University (USA) 5 26/11/2012 Student satellite project 6 26/11/2012 Orbiting Satellite Carrying Amateur Radio (OSCARs) Early satellite projects • April 1959 Concept of a satellite built by and for amateurs • OSCAR I Dec 1961 - Jan 1962, -

China's Touch on the Moon
commentary China’s touch on the Moon Long Xiao As well as being a milestone in technology, the Chang’e lunar exploration programme establishes China as a contributor to space science. With much still to learn about the Moon, fieldwork beyond Earth’s orbit must be an international effort. hen China’s Chang’e 3 spacecraft geological history of the landing site. touched down on the lunar High-resolution images have shown rocky Wsurface on 14 December 2013, terrain with outcrops of porphyritic basalt, it was the first soft landing on the Moon such as Loong Rock (Fig. 2). Analysis since the Soviet Union’s Luna 24 mission of data collected by the penetrating in 1976. Following on from the decades- Chang’e 3 radar should lead to identification of the old triumphs of the Luna missions and underlying layers of regolith, impact breccia NASA’s Apollo programme, the Chang’e and basalt. lunar exploration programme is leading the China’s robotic field geologist Yutu has charge of a new generation of exploration Basalt outcrop Yutu rover stalled in its traverse of the lunar surface, on the lunar surface. Much like the earlier but plans for the Chang’e 5 sample-return space programmes, the China National mission are moving forward. The primary Space Administration (CNSA) has been objective of the mission will be to return developing its capabilities and technologies 100 m 2 kg of samples from the surface and depths step by step in a series of Chang’e missions UNIVERSITY STATE © NASA/GSFC/ARIZONA of up to 2 m, probably also in the relatively of increasing ambition: orbiting and Figure 1 | The Chinese Chang’e 3 spacecraft and smooth northern Mare Imbrium. -

Peter Gülzow, DB2OS 2020-06-05 © AMSAT-DL OSCAR-10 (P3-B) OSCAR-13 (P3-C) OSCAR-40 (P3-D)
Peter Gülzow, DB2OS 2020-06-05 © AMSAT-DL OSCAR-10 (P3-B) OSCAR-13 (P3-C) OSCAR-40 (P3-D) OSCAR-100 (P4-A) AMSAT Phase 4 = GEO The meaning of Es'hail “The story behind the name Es’hail (Canopus) is the name of a star which becomes visible in the night sky of the Middle East as summer turns to autumn. Traditionally, the sighting of Es’hail brings happiness as it means that winter is coming and that good weather will soon be with us. We hope that the arrival of Es’hailSat will equally be beneficial for the satellite community.” (from Es’hailSat: Follow the star) Canopus /kəˈnoʊpəs is the brightest star in the southern constellation of Carina, and is located near the western edge of the constellation around 310 light-years from the Sun. Its proper name is generally considered to originate from the mythological Canopus, who was a navigator for Menelaus, king of Sparta. H E Abdullah bin Hamad Al Attiyah, A71AU, Chairman of the Administrative Control and Time line Transparency Authority, who is also the Chairman of the Qatar Amateur Radio 1001+ arabian nights… Society (QARS) during the Qatar international amateur radio festival in December 2012. 2012 AMSAT-DL meets QARS | (DB2OS @ International Amateur Radio Festival in Qatar) | 2013 Es’hailSat - | Qatar Satellite Company | (idea, concept, design requirements, RFI, meetings with potential | suppliers, RFP, finalisiation of requirements) | 2016 Kick-Off at MELCO Japan | (Technical presentations, Requirements review, Critical Design Review, | Design Validation) | 2018 November 15th launch with SpaceX Falcon 9 2012 Qatar Ham Radio Festival Executives from Qatar’s Es’hailSat and Japan’s Mitsubishi Electric Space Systems (MELCO) in Kamakura, outside of Tokyo, Japan, to observe the vacuum chamber test of Es'hail-2. -

Orbital Lifetime Predictions
Orbital LIFETIME PREDICTIONS An ASSESSMENT OF model-based BALLISTIC COEFfiCIENT ESTIMATIONS AND ADJUSTMENT FOR TEMPORAL DRAG co- EFfiCIENT VARIATIONS M.R. HaneVEER MSc Thesis Aerospace Engineering Orbital lifetime predictions An assessment of model-based ballistic coecient estimations and adjustment for temporal drag coecient variations by M.R. Haneveer to obtain the degree of Master of Science at the Delft University of Technology, to be defended publicly on Thursday June 1, 2017 at 14:00 PM. Student number: 4077334 Project duration: September 1, 2016 – June 1, 2017 Thesis committee: Dr. ir. E. N. Doornbos, TU Delft, supervisor Dr. ir. E. J. O. Schrama, TU Delft ir. K. J. Cowan MBA TU Delft An electronic version of this thesis is available at http://repository.tudelft.nl/. Summary Objects in Low Earth Orbit (LEO) experience low levels of drag due to the interaction with the outer layers of Earth’s atmosphere. The atmospheric drag reduces the velocity of the object, resulting in a gradual decrease in altitude. With each decayed kilometer the object enters denser portions of the atmosphere accelerating the orbit decay until eventually the object cannot sustain a stable orbit anymore and either crashes onto Earth’s surface or burns up in its atmosphere. The capability of predicting the time an object stays in orbit, whether that object is space junk or a satellite, allows for an estimate of its orbital lifetime - an estimate satellite op- erators work with to schedule science missions and commercial services, as well as use to prove compliance with international agreements stating no passively controlled object is to orbit in LEO longer than 25 years. -

The Future of Amateur Radio Satellites in the Cubesat
The Future of Amateur Radio Satellites in the CubeSat Era The Radio Amateur Satellite Corporation (AMSAT) seeks to place an ongoing series of 3U or 6U satellites into highly elliptical orbits to provide long duration communications service to the worldwide amateur radio community. AMSAT's technical challenges in preparing a HEO satellite mission are very similar to what is required for Lunar or Interplanetary CubeSat missions, including harsh thermal and radiation environments, little or no magnetic field to torque against, and challenging communications links, which make this mission very different from the many LEO CubeSats that have been built and launched by other organizations. AMSAT is seeking partnerships with other organizations to demonstrate new technologies in High Earth Orbit, to carry low cost scientific instruments into HEO and to qualify for NASA sponsored launches into Geosynchronous Transfer Orbit or other high altitude orbits whenever such an opportunity occurs. Radio Amateurs have been building and launching small satellites for over 50 years. OSCAR-1 was launched on December 12, 1961 as a secondary payload on the Thor- Agena rocket that launched the US Air Force Discoverer-36 mission. OSCAR-1 was the first satellite to be deployed as a secondary payload from a launch vehicle. The bureaucratic efforts required to secure permission to launch OSCAR-1 greatly exceeded the effort required to build the satellite and established a precedent for all subsequent secondary payload launches of the past five decades. OSCAR stands for “Orbiting Satellite Carrying Amateur Radio”. Today many agencies, laboratories, universities and high schools are building and launching dozens of small satellites every year, but it all started with OSCAR-1 in 1961. -
Cubesat Data Analysis Revision
371-XXXXX Revision - CubeSat Data Analysis Revision - November 2015 Prepared by: GSFC/Code 371 National Aeronautics and Goddard Space Flight Center Space Administration Greenbelt, Maryland 20771 371-XXXXX Revision - Signature Page Prepared by: ___________________ _____ Mark Kaminskiy Date Reliability Engineer ARES Corporation Accepted by: _______________________ _____ Nasir Kashem Date Reliability Lead NASA/GSFC Code 371 1 371-XXXXX Revision - DOCUMENT CHANGE RECORD REV DATE DESCRIPTION OF CHANGE LEVEL APPROVED - Baseline Release 2 371-XXXXX Revision - Table of Contents 1 Introduction 4 2 Statement of Work 5 3 Database 5 4 Distributions by Satellite Classes, Users, Mass, and Volume 7 4.1 Distribution by satellite classes 7 4.2 Distribution by satellite users 8 4.3 CubeSat Distribution by mass 8 4.4 CubeSat Distribution by volume 8 5 Annual Number of CubeSats Launched 9 6 Reliability Data Analysis 10 6.1 Introducing “Time to Event” variable 10 6.2 Probability of a Successful Launch 10 6.3 Estimation of Probability of Mission Success after Successful Launch. Kaplan-Meier Nonparametric Estimate and Weibull Distribution. 10 6.3.1 Kaplan-Meier Estimate 10 6.3.2 Weibull Distribution Estimation 11 6.4 Estimation of Probability of mission success after successful launch as a function of time and satellite mass using Weibull Regression 13 6.4.1 Weibull Regression 13 6.4.2 Data used for estimation of the model parameters 13 6.4.3 Comparison of the Kaplan-Meier estimates of the Reliability function and the estimates based on the Weibull regression 16 7 Conclusion 17 8 Acknowledgement 18 9 References 18 10 Appendix 19 Table of Figures Figure 4-1 CubeSats distribution by mass .................................................................................................... -

Spacecraft System Failures and Anomalies Attributed to the Natural Space Environment
NASA Reference Publication 1390 - j Spacecraft System Failures and Anomalies Attributed to the Natural Space Environment K.L. Bedingfield, R.D. Leach, and M.B. Alexander, Editor August 1996 NASA Reference Publication 1390 Spacecraft System Failures and Anomalies Attributed to the Natural Space Environment K.L. Bedingfield Universities Space Research Association • Huntsville, Alabama R.D. Leach Computer Sciences Corporation • Huntsville, Alabama M.B. Alexander, Editor Marshall Space Flight Center • MSFC, Alabama National Aeronautics and Space Administration Marshall Space Flight Center ° MSFC, Alabama 35812 August 1996 PREFACE The effects of the natural space environment on spacecraft design, development, and operation are the topic of a series of NASA Reference Publications currently being developed by the Electromagnetics and Aerospace Environments Branch, Systems Analysis and Integration Laboratory, Marshall Space Flight Center. This primer provides an overview of seven major areas of the natural space environment including brief definitions, related programmatic issues, and effects on various spacecraft subsystems. The primary focus is to present more than 100 case histories of spacecraft failures and anomalies documented from 1974 through 1994 attributed to the natural space environment. A better understanding of the natural space environment and its effects will enable spacecraft designers and managers to more effectively minimize program risks and costs, optimize design quality, and achieve mission objectives. .o° 111 TABLE OF CONTENTS -

Analysis and Design of Integrated Magnetorquer Coils for Attitude Control of Nanosatellites
Analysis and Design of Integrated Magnetorquer Coils for Attitude Control of Nanosatellites Hassan Ali*, M. Rizwan Mughal*†, Jaan Praks †, Leonardo M. Reyneri+, Qamar ul Islam* * †Department of Electrical Engineering, Institute of Space Technology, Islamabad, Pakistan, †Department of Electronic and Nano Engineering, Aalto University, Espoo, Finland +Department of Electronics and Telecommunications, Politecnico di Torino, Torino, Italy Abstract—The nanosatellites typically use either magnetic rods or become a challenge. In order to stabilize the tumbling satellite, coil to generate magnetic moment which consequently interacts the attitude control system is very necessary. There are two with the earth magnetic field to generate torque. In this research, types of attitude control systems i.e. passive and active [1-6]. we present a novel design which integrates printed embedded The permanent magnetics and the gravity gradients are passive coils, compact coils and magnetic rods in a single package which type. They being cost effective, consume no power but no is also complaint with 1U CubeSat. These options provide maximum flexibility, redundancy and scalability in the design. pointing accuracy is achieved using these types of actuators. The printed coils consume no extra space because the copper The majority of the missions these days require better pointing traces are printed in the internal layers of the printed circuit accuracies. The active control systems are typically used for in board (PCB). Moreover, they can be made reconfigurable by missions where better pointing accuracy is desired. The printing them into certain layers of the PCB, allowing the user to magnetorquer is a good option to control the attitude of select any combination of series and parallel coils for optimized nanosatellite. -

Highlights in Space 2010
International Astronautical Federation Committee on Space Research International Institute of Space Law 94 bis, Avenue de Suffren c/o CNES 94 bis, Avenue de Suffren UNITED NATIONS 75015 Paris, France 2 place Maurice Quentin 75015 Paris, France Tel: +33 1 45 67 42 60 Fax: +33 1 42 73 21 20 Tel. + 33 1 44 76 75 10 E-mail: : [email protected] E-mail: [email protected] Fax. + 33 1 44 76 74 37 URL: www.iislweb.com OFFICE FOR OUTER SPACE AFFAIRS URL: www.iafastro.com E-mail: [email protected] URL : http://cosparhq.cnes.fr Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law The United Nations Office for Outer Space Affairs is responsible for promoting international cooperation in the peaceful uses of outer space and assisting developing countries in using space science and technology. United Nations Office for Outer Space Affairs P. O. Box 500, 1400 Vienna, Austria Tel: (+43-1) 26060-4950 Fax: (+43-1) 26060-5830 E-mail: [email protected] URL: www.unoosa.org United Nations publication Printed in Austria USD 15 Sales No. E.11.I.3 ISBN 978-92-1-101236-1 ST/SPACE/57 *1180239* V.11-80239—January 2011—775 UNITED NATIONS OFFICE FOR OUTER SPACE AFFAIRS UNITED NATIONS OFFICE AT VIENNA Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law Progress in space science, technology and applications, international cooperation and space law UNITED NATIONS New York, 2011 UniTEd NationS PUblication Sales no. -

The Annual Compendium of Commercial Space Transportation: 2012
Federal Aviation Administration The Annual Compendium of Commercial Space Transportation: 2012 February 2013 About FAA About the FAA Office of Commercial Space Transportation The Federal Aviation Administration’s Office of Commercial Space Transportation (FAA AST) licenses and regulates U.S. commercial space launch and reentry activity, as well as the operation of non-federal launch and reentry sites, as authorized by Executive Order 12465 and Title 51 United States Code, Subtitle V, Chapter 509 (formerly the Commercial Space Launch Act). FAA AST’s mission is to ensure public health and safety and the safety of property while protecting the national security and foreign policy interests of the United States during commercial launch and reentry operations. In addition, FAA AST is directed to encourage, facilitate, and promote commercial space launches and reentries. Additional information concerning commercial space transportation can be found on FAA AST’s website: http://www.faa.gov/go/ast Cover art: Phil Smith, The Tauri Group (2013) NOTICE Use of trade names or names of manufacturers in this document does not constitute an official endorsement of such products or manufacturers, either expressed or implied, by the Federal Aviation Administration. • i • Federal Aviation Administration’s Office of Commercial Space Transportation Dear Colleague, 2012 was a very active year for the entire commercial space industry. In addition to all of the dramatic space transportation events, including the first-ever commercial mission flown to and from the International Space Station, the year was also a very busy one from the government’s perspective. It is clear that the level and pace of activity is beginning to increase significantly. -

Thermal Design, Analysis and Test Validation of Turksat-3Usat Satellite
Journal of Thermal Engineering, Vol. 7, No. 3, pp. 468-482, March, 2021 Yildiz Technical University Press, Istanbul, Turkey THERMAL DESIGN, ANALYSIS AND TEST VALIDATION OF TURKSAT-3USAT SATELLITE Murat Bulut1,*, Nedim Sözbir2 ABSTRACT When CubeSat projects are a useful means by which universities can engage their students in space-related activities. TURKSAT-3USAT is a three-unit amateur radio CubeSat jointly developed by the Space Systems Design and Test Laboratory and the Radio Frequency Electronics Laboratory of Istanbul Technical University (ITU), in collaboration with TURKSAT, A.S. company as well as the Turkish Amateur Technology Organization. It was launched on April 26, 2013 as a secondary payload on a CZ-2D rocket from China’s Jiuquan Space Center to an altitude of approximately 680 km. The mission of the satellite has two primary goals: (1) to voice communication at Low Earth Orbit (LEO) and (2) to educate students by providing hands-on experience. TURKSAT-3USAT was designed to sustain a circular, near sun-synchronous LEO, and has dimensions of 10 x 10 x 34 cm3. Within the course of this paper, TURKSAT-3USAT’s thermal control will be addressed. TURKSAT-3USAT’s thermal control model was developed using ThermXL and ESATAN-TMS software. Using this model, temperature distributions of the CubeSat when subjected to various experimental conditions of interest were computed. Using a thermal vacuum chamber (TVAC), thermal cycling and bake-out testing were carried out on the flight model to verify the thermal design performance and check the mathematical model. Based on thermal analysis results, the temperature of equipment was within the allowable temperature range except for the batteries that were between 42.56 oC and -20.31 oC. -
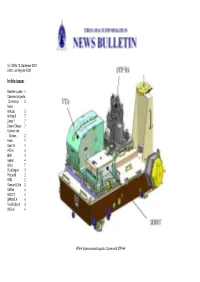
In This Issue
Vol. 38 No.12, September 2013 Editor: Jos Heyman FBIS In this issue: Satellite Update 4 Cancelled projects: Conestoga 5 News Ardusat 3 Arirang-5 7 Dnepr 1 7 Dream Chaser 7 Eutelsat and Satmex 2 Fermi 7 Gsat-14 7 HTV-4 3 iBall 3 Kepler 4 Orion 7 PicoDragon 3 Proton M 2 RCM 2 Russian EVAs 2 SARah 4 SGDC-1 4 SPRINT A 4 TechEdSat-3 3 WGS-6 4 HTV-4 Unpressurised Logistics Carrier with STP-H4 TIROS SPACE INFORMATION Eutelsat and Satmex 86 Barnevelder Bend, Southern River WA 6110, Australia Tel + 61 8 9398 1322 Eutelsat has acquired Mexico’s Satmex, a major communicaions satellite operator in the Latin (e-mail: [email protected]) American region. o o The Tiros Space Information (TSI) - News Bulletin is published to promote the scientific exploration and Satmex has currently three satellites in orbit at 113 W (Satmex-6), 114.9 W (Satmex-5) and commercial application of space through the dissemination of current news and historical facts. 116.8 oW (Satmex-8) and it can be expected that, once the acquisition has been completed, In doing so, Tiros Space Information continues the traditions of the Western Australian Branch of the these satellites will be renamed as part of the Eutelsat family. In addition Satmex has the Astronautical Society of Australia (1973-1975) and the Astronautical Society of Western Australia (ASWA) Satmex-7 and -9 satellites on order from Boeing. It is not clear whether these satellites will (1975-2006). remain on order. The News Bulletin can be received worldwide by e-mail subscription only.