Measuring the Control Loop Response of a Power Supply Using an Oscilloscope ––
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Op Amp Stability and Input Capacitance
Amplifiers: Op Amps Texas Instruments Incorporated Op amp stability and input capacitance By Ron Mancini (Email: [email protected]) Staff Scientist, Advanced Analog Products Introduction Figure 1. Equation 1 can be written from the op Op amp instability is compensated out with the addition of amp schematic by opening the feedback loop an external RC network to the circuit. There are thousands and calculating gain of different op amps, but all of them fall into two categories: uncompensated and internally compensated. Uncompen- sated op amps always require external compensation ZG ZF components to achieve stability; while internally compen- VIN1 sated op amps are stable, under limited conditions, with no additional external components. – ZG VOUT Internally compensated op amps can be made unstable VIN2 + in several ways: by driving capacitive loads, by adding capacitance to the inverting input lead, and by adding in ZF phase feedback with external components. Adding in phase feedback is a popular method of making an oscillator that is beyond the scope of this article. Input capacitance is hard to avoid because the op amp leads have stray capaci- tance and the printed circuit board contributes some stray Figure 2. Open-loop-gain/phase curves are capacitance, so many internally compensated op amp critical stability-analysis tools circuits require external compensation to restore stability. Output capacitance comes in the form of some kind of load—a cable, converter-input capacitance, or filter 80 240 VDD = 1.8 V & 2.7 V (dB) 70 210 capacitance—and reduces stability in buffer configurations. RL= 2 kΩ VD 60 180 CL = 10 pF 150 Stability theory review 50 TA = 25˚C 40 120 Phase The theory for the op amp circuit shown in Figure 1 is 90 β 30 taken from Reference 1, Chapter 6. -

EE C128 Chapter 10
Lecture abstract EE C128 / ME C134 – Feedback Control Systems Topics covered in this presentation Lecture – Chapter 10 – Frequency Response Techniques I Advantages of FR techniques over RL I Define FR Alexandre Bayen I Define Bode & Nyquist plots I Relation between poles & zeros to Bode plots (slope, etc.) Department of Electrical Engineering & Computer Science st nd University of California Berkeley I Features of 1 -&2 -order system Bode plots I Define Nyquist criterion I Method of dealing with OL poles & zeros on imaginary axis I Simple method of dealing with OL stable & unstable systems I Determining gain & phase margins from Bode & Nyquist plots I Define static error constants September 10, 2013 I Determining static error constants from Bode & Nyquist plots I Determining TF from experimental FR data Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 1 / 64 Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 2 / 64 10 FR techniques 10.1 Intro Chapter outline 1 10 Frequency response techniques 1 10 Frequency response techniques 10.1 Introduction 10.1 Introduction 10.2 Asymptotic approximations: Bode plots 10.2 Asymptotic approximations: Bode plots 10.3 Introduction to Nyquist criterion 10.3 Introduction to Nyquist criterion 10.4 Sketching the Nyquist diagram 10.4 Sketching the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.7 Stability, gain margin, and -

OA-25 Stability Analysis of Current Feedback Amplifiers
OBSOLETE Application Report SNOA371C–May 1995–Revised April 2013 OA-25 Stability Analysis of Current Feedback Amplifiers ..................................................................................................................................................... ABSTRACT High frequency current-feedback amplifiers (CFA) are finding a wide acceptance in more complicated applications from dc to high bandwidths. Often the applications involve amplifying signals in simple resistive networks for which the device-specific data sheets provide adequate information to complete the task. Too often the CFA application involves amplifying signals that have a complex load or parasitic components at the external nodes that creates stability problems. Contents 1 Introduction .................................................................................................................. 2 2 Stability Review ............................................................................................................. 2 3 Review of Bode Analysis ................................................................................................... 2 4 A Better Model .............................................................................................................. 3 5 Mathematical Justification .................................................................................................. 3 6 Open Loop Transimpedance Plot ......................................................................................... 4 7 Including Z(s) ............................................................................................................... -
Chapter 6 Amplifiers with Feedback
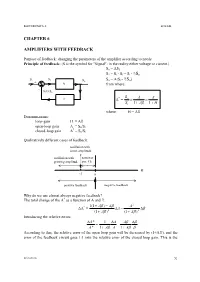
ELECTRONICS-1. ZOLTAI CHAPTER 6 AMPLIFIERS WITH FEEDBACK Purpose of feedback: changing the parameters of the amplifier according to needs. Principle of feedback: (S is the symbol for Signal: in the reality either voltage or current.) So = AS1 S1 = Si - Sf = Si - ßSo Si S1 So = A(Si - S ) So ß o + A from where: - Sf=ßSo * So A A ß A = Si 1 A 1 H where: H = Aß Denominations: loop-gain H = Aß open-loop gain A = So/S1 * closed-loop gain A = So/Si Qualitatively different cases of feedback: oscillation with const. amplitude oscillation with narrower growing amplitude pos. f.b. H -1 0 positive feedback negative feedback Why do we use almost always negative feedback? * The total change of the A as a function of A and ß: 1(1 A) A A 2 A* = A (1 A) 2 (1 A) 2 Introducing the relative errors: A * 1 A A A * 1 A A 1 A According to this, the relative error of the open loop gain will be decreased by (1+Aß), and the error of the feedback circuit goes 1:1 into the relative error of the closed loop gain. This is the Elec1-fb.doc 52 ELECTRONICS-1. ZOLTAI reason for using almost always the negative feedback. (We can not take advantage of the negative sign, because the sign of the relative errors is random.) Speaking of negative or positive feedback is only justified if A and ß are real quantities. Generally they are complex quantities, and the type of the feedback is a function of the frequency: E.g. -

MT-033: Voltage Feedback Op Amp Gain and Bandwidth
MT-033 TUTORIAL Voltage Feedback Op Amp Gain and Bandwidth INTRODUCTION This tutorial examines the common ways to specify op amp gain and bandwidth. It should be noted that this discussion applies to voltage feedback (VFB) op amps—current feedback (CFB) op amps are discussed in a later tutorial (MT-034). OPEN-LOOP GAIN Unlike the ideal op amp, a practical op amp has a finite gain. The open-loop dc gain (usually referred to as AVOL) is the gain of the amplifier without the feedback loop being closed, hence the name “open-loop.” For a precision op amp this gain can be vary high, on the order of 160 dB (100 million) or more. This gain is flat from dc to what is referred to as the dominant pole corner frequency. From there the gain falls off at 6 dB/octave (20 dB/decade). An octave is a doubling in frequency and a decade is ×10 in frequency). If the op amp has a single pole, the open-loop gain will continue to fall at this rate as shown in Figure 1A. A practical op amp will have more than one pole as shown in Figure 1B. The second pole will double the rate at which the open- loop gain falls to 12 dB/octave (40 dB/decade). If the open-loop gain has dropped below 0 dB (unity gain) before it reaches the frequency of the second pole, the op amp will be unconditionally stable at any gain. This will be typically referred to as unity gain stable on the data sheet. -
Operational Amplifiers: Part 3 Non-Ideal Behavior of Feedback
Operational Amplifiers: Part 3 Non-ideal Behavior of Feedback Amplifiers AC Errors and Stability by Tim J. Sobering Analog Design Engineer & Op Amp Addict Copyright 2014 Tim J. Sobering Finite Open-Loop Gain and Small-signal analysis Define VA as the voltage between the Op Amp input terminals Use KCL 0 V_OUT = Av x Va + + Va OUT V_OUT - Note the - Av “Loop Gain” – Avβ β V_IN Rg Rf Copyright 2014 Tim J. Sobering Liberally apply algebra… 0 0 1 1 1 1 1 1 1 1 Copyright 2014 Tim J. Sobering Get lost in the algebra… 1 1 1 1 1 1 1 Copyright 2014 Tim J. Sobering More algebra… Recall β is the Feedback Factor and define α 1 1 1 1 1 Copyright 2014 Tim J. Sobering You can apply the exact same analysis to the Non-inverting amplifier Lots of steps and algebra and hand waving yields… 1 This is very similar to the Inverting amplifier configuration 1 Note that if Av → ∞, converges to 1/β and –α /β –Rf /Rg If we can apply a little more algebra we can make this converge on a single, more informative, solution Copyright 2014 Tim J. Sobering You can apply the exact same analysis to the Non-inverting amplifier Non-inverting configuration Inverting Configuration 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Copyright 2014 Tim J. Sobering Inverting and Non-Inverting Amplifiers “seem” to act the same way Magically, we again obtain the ideal gain times an error term If Av → ∞ we obtain the ideal gain 1 1 1 Avβ is called the Loop Gain and determines stability If Avβ –1 1180° the error term goes to infinity and you have an oscillator – this is the “Nyquist Criterion” for oscillation Gain error is obtained from the loop gain 1 For < 1% gain error, 40 dB 1 (2 decades in bandwidth!) 1 Copyright 2014 Tim J. -

How to Measure the Loop Transfer Function of Power Supplies (Rev. A)
Application Report SNVA364A–October 2008–Revised April 2013 AN-1889 How to Measure the Loop Transfer Function of Power Supplies ..................................................................................................................................................... ABSTRACT This application report shows how to measure the critical points of a bode plot with only an audio generator (or simple signal generator) and an oscilloscope. The method is explained in an easy to follow step-by-step manner so that a power supply designer can start performing these measurements in a short amount of time. Contents 1 Introduction .................................................................................................................. 2 2 Step 1: Setting up the Circuit .............................................................................................. 2 3 Step 2: The Injection Transformer ........................................................................................ 4 4 Step 3: Preparing the Signal Generator .................................................................................. 4 5 Step 4: Hooking up the Oscilloscope ..................................................................................... 4 6 Step 5: Preparing the Power Supply ..................................................................................... 4 7 Step 6: Taking the Measurement ......................................................................................... 5 8 Step 7: Analyzing a Bode Plot ........................................................................................... -

The TL431 in the Control of Switching Power Supplies Agenda
The TL431 in the Control of Switching Power Supplies Agenda Feedback generalities The TL431 in a compensator Small-signal analysis of the return chain A type 1 implementation with the TL431 A type 2 implementation with the TL431 A type 3 implementation with the TL431 Design examples Conclusion Agenda Feedback generalities The TL431 in a compensator Small-signal analysis of the return chain A type 1 implementation with the TL431 A type 2 implementation with the TL431 A type 3 implementation with the TL431 Design examples Conclusion What is a Regulated Power Supply? Vout is permanently compared to a reference voltage Vref. The reference voltage Vref is precise and stable over temperature. The error,ε =−VVrefα out, is amplified and sent to the control input. The power stage reacts to reduce ε as much as it can. Power stage - H Vout Control d variable Error amplifier - G Rupper + - Vin - - α + + Vp Modulator - G V PWM ref Rlower How is Regulation Performed? Text books only describe op amps in compensators… Vout Verr The market reality is different: the TL431 rules! V I’m the out law! Verr TL431 optocoupler How do we Stabilize a Converter? We need a high gain at dc for a low static error We want a sufficiently high crossover frequency for response speed ¾ Shape the compensator G(s) to build phase and gain margins! Ts( ) fc = 6.5 kHz 0° -0 dB ∠Ts( ) -88° GM = 67 dB ϕm = 92° -180° Ts( ) =−67 dB 10 100 1k 10k 100k 1Meg How Much Phase Margin to Chose? a Q factor of 0.5 (critical response) implies a ϕm of 76° a 45° ϕm corresponds -
Design of a TL431-Based Controller for a Flyback Converter
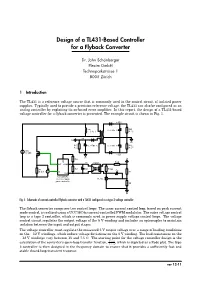
Design of a TL431-Based Controller for a Flyback Converter Dr. John Schönberger Plexim GmbH Technoparkstrasse 1 8005 Zürich 1 Introduction The TL431 is a reference voltage source that is commonly used in the control circuit of isolated power supplies. Typically used to provide a precision reference voltage, the TL431 can also be configured as an analog controller by exploiting its on-board error amplifier. In this report, the design of a TL431-based voltage controller for a flyback converter is presented. The example circuit is shown in Fig. 1. 0 ) ( %& -./ ' *+, !""# $#"" Fig. 1: Schematic of current-controlled flyback converter with a TL431 configured as a type 2 voltage controller. The flyback converter comprises two control loops. The inner current control loop, based on peak current mode control, is realized using a UCC38C4x current-controlled PWM modulator. The outer voltage control loop is a type 2 controller, which is commonly used in power supply voltage control loops. The voltage control circuit regulates the output voltage of the 5 V winding and includes an optocoupler to maintain isolation between the input and output stages. The voltage controller must regulate the measured 5 V output voltage over a range of loading conditions on the 12 V windings, which induce voltage deviations on the 5 V winding. The load resistances on the ± 12 V windings vary between 15 and 7.5 Ω. The starting point for the voltage controller design is the ± calculation of the converter’s open-loop transfer function, Vo(s) , which is depicted as a Bode plot. The type Vc(s) 2 controller is then designed in the frequency domain to ensure that it provides a sufficiently fast and stable closed-loop transient response. -

Measuring the Control Loop Response of a Power Supply Using an Oscilloscope ––
Measuring the Control Loop Response of a Power Supply Using an Oscilloscope –– APPLICATION NOTE MSO 5/6 with built-in AFG AFG Signal Injection Transformers J2100A/J2101A VIN VOUT TPP0502 TPP0502 5Ω RINJ T1 Modulator R1 fb – comp R2 + + VREF – Measuring the Control Loop Response of a Power Supply Using an Oscilloscope APPLICATION NOTE Most power supplies and regulators are designed to maintain a Introduction to Frequency Response constant voltage over a specified current range. To accomplish Analysis this goal, they are essentially amplifiers with a closed feedback loop. An ideal supply needs to respond quickly and maintain The frequency response of a system is a frequency-dependent a constant output, but without excessive ringing or oscillation. function that expresses how a reference signal (usually a Control loop measurements help to characterize how a power sinusoidal waveform) of a particular frequency at the system supply responds to changes in output load conditions. input (excitation) is transferred through the system. Although frequency response analysis may be performed A generalized control loop is shown in Figure 1 in which a using dedicated equipment, newer oscilloscopes may be sinewave a(t) is applied to a system with transfer function used to measure the response of a power supply control G(s). After transients due to initial conditions have decayed loop. Using an oscilloscope, signal source and automation away, the output b(t) becomes a sinewave but with a different software, measurements can be made quickly and presented magnitude B and relative phase Φ. The magnitude and phase as familiar Bode plots, making it easy to evaluate margins and of the output b(t) are in fact related to the transfer function compare circuit performance to models. -
DC-DC Converters Feedback and Control
DC-DC Converters Feedback and Control Agenda Feedback generalities Conditions for stability Poles and zeros Phase margin and quality coefficient Undershoot and crossover frequency Compensating the converter Compensating with a TL431 Watch the optocoupler! Compensating a DCM flyback Compensating a CCM flyback Simulation and bench results Conclusion www.onsemi.com 2 Agenda Feedback generalities Conditions for stability Poles and zeros Phase margin and quality coefficient Undershoot and crossover frequency Compensating the converter Compensating with a TL431 Watch the optocoupler! Compensating a DCM flyback Compensating a CCM flyback Simulation and bench results Conclusion www.onsemi.com 3 What is Feedback? A target is assigned to one or several state-variables, e.g. Vout = 12 V. A circuitry monitors Vout deviations related to Vin, Iout, T° etc. If Vout deviates from its target, an error is created and fed-back to the power stage for action. The action is a change in the control variable: duty-cycle (VM), peak current (CM) or the switching frequency. Compensating for the converter shortcomings! Input voltage Output voltage DC-DC Rth Vin Vout Input voltage Vth Vout Vin action control www.onsemi.com 4 The Feedback Implementation Vout is permanently compared to a reference voltage Vref. The reference voltage Vref is precise and stable over temperature. The error,ε =−VVrefα out, is amplified and sent to the control input. The power stage reacts to reduce ε as much as it can. Power stage - H Vout Control d variable -

An 201610 Pl16 01
AN_201610_PL16_01 Using the IRS2982S in a PFC Flyback with opto-isolated feedback Authors: Peter B. Green About this document Scope and purpose The purpose of this document is to provide a comprehensive guide to using the IRS2982S control IC for LED drivers in a single stage PFC-Flyback converter, which instead of using the transformer auxiliary winding for voltage regulation, uses an opto-isolated secondary feedback circuit for voltage and/or current regulation. The scope applies to all technical aspects that should be considered in the design process, including calculation of external component values, with a focus on designing the feedback loop to avoid instability. Intended audience Power supply design engineers, applications engineers, students. Table of Contents About this document .............................................................................................................................................1 Table of Contents ..................................................................................................................................................1 1 Introduction.......................................................................................................................................2 2 IRS2982S functional overview............................................................................................................4 3 MOSFET selection ..............................................................................................................................6 4 Voltage regulating