How to Measure the Loop Transfer Function of Power Supplies (Rev. A)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Op Amp Stability and Input Capacitance
Amplifiers: Op Amps Texas Instruments Incorporated Op amp stability and input capacitance By Ron Mancini (Email: [email protected]) Staff Scientist, Advanced Analog Products Introduction Figure 1. Equation 1 can be written from the op Op amp instability is compensated out with the addition of amp schematic by opening the feedback loop an external RC network to the circuit. There are thousands and calculating gain of different op amps, but all of them fall into two categories: uncompensated and internally compensated. Uncompen- sated op amps always require external compensation ZG ZF components to achieve stability; while internally compen- VIN1 sated op amps are stable, under limited conditions, with no additional external components. – ZG VOUT Internally compensated op amps can be made unstable VIN2 + in several ways: by driving capacitive loads, by adding capacitance to the inverting input lead, and by adding in ZF phase feedback with external components. Adding in phase feedback is a popular method of making an oscillator that is beyond the scope of this article. Input capacitance is hard to avoid because the op amp leads have stray capaci- tance and the printed circuit board contributes some stray Figure 2. Open-loop-gain/phase curves are capacitance, so many internally compensated op amp critical stability-analysis tools circuits require external compensation to restore stability. Output capacitance comes in the form of some kind of load—a cable, converter-input capacitance, or filter 80 240 VDD = 1.8 V & 2.7 V (dB) 70 210 capacitance—and reduces stability in buffer configurations. RL= 2 kΩ VD 60 180 CL = 10 pF 150 Stability theory review 50 TA = 25˚C 40 120 Phase The theory for the op amp circuit shown in Figure 1 is 90 β 30 taken from Reference 1, Chapter 6. -

EE C128 Chapter 10
Lecture abstract EE C128 / ME C134 – Feedback Control Systems Topics covered in this presentation Lecture – Chapter 10 – Frequency Response Techniques I Advantages of FR techniques over RL I Define FR Alexandre Bayen I Define Bode & Nyquist plots I Relation between poles & zeros to Bode plots (slope, etc.) Department of Electrical Engineering & Computer Science st nd University of California Berkeley I Features of 1 -&2 -order system Bode plots I Define Nyquist criterion I Method of dealing with OL poles & zeros on imaginary axis I Simple method of dealing with OL stable & unstable systems I Determining gain & phase margins from Bode & Nyquist plots I Define static error constants September 10, 2013 I Determining static error constants from Bode & Nyquist plots I Determining TF from experimental FR data Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 1 / 64 Bayen (EECS, UCB) Feedback Control Systems September 10, 2013 2 / 64 10 FR techniques 10.1 Intro Chapter outline 1 10 Frequency response techniques 1 10 Frequency response techniques 10.1 Introduction 10.1 Introduction 10.2 Asymptotic approximations: Bode plots 10.2 Asymptotic approximations: Bode plots 10.3 Introduction to Nyquist criterion 10.3 Introduction to Nyquist criterion 10.4 Sketching the Nyquist diagram 10.4 Sketching the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.5 Stability via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.6 Gain margin and phase margin via the Nyquist diagram 10.7 Stability, gain margin, and -

OA-25 Stability Analysis of Current Feedback Amplifiers
OBSOLETE Application Report SNOA371C–May 1995–Revised April 2013 OA-25 Stability Analysis of Current Feedback Amplifiers ..................................................................................................................................................... ABSTRACT High frequency current-feedback amplifiers (CFA) are finding a wide acceptance in more complicated applications from dc to high bandwidths. Often the applications involve amplifying signals in simple resistive networks for which the device-specific data sheets provide adequate information to complete the task. Too often the CFA application involves amplifying signals that have a complex load or parasitic components at the external nodes that creates stability problems. Contents 1 Introduction .................................................................................................................. 2 2 Stability Review ............................................................................................................. 2 3 Review of Bode Analysis ................................................................................................... 2 4 A Better Model .............................................................................................................. 3 5 Mathematical Justification .................................................................................................. 3 6 Open Loop Transimpedance Plot ......................................................................................... 4 7 Including Z(s) ............................................................................................................... -
Chapter 6 Amplifiers with Feedback
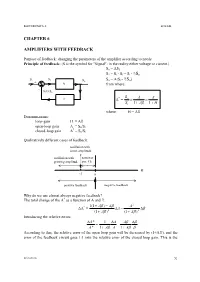
ELECTRONICS-1. ZOLTAI CHAPTER 6 AMPLIFIERS WITH FEEDBACK Purpose of feedback: changing the parameters of the amplifier according to needs. Principle of feedback: (S is the symbol for Signal: in the reality either voltage or current.) So = AS1 S1 = Si - Sf = Si - ßSo Si S1 So = A(Si - S ) So ß o + A from where: - Sf=ßSo * So A A ß A = Si 1 A 1 H where: H = Aß Denominations: loop-gain H = Aß open-loop gain A = So/S1 * closed-loop gain A = So/Si Qualitatively different cases of feedback: oscillation with const. amplitude oscillation with narrower growing amplitude pos. f.b. H -1 0 positive feedback negative feedback Why do we use almost always negative feedback? * The total change of the A as a function of A and ß: 1(1 A) A A 2 A* = A (1 A) 2 (1 A) 2 Introducing the relative errors: A * 1 A A A * 1 A A 1 A According to this, the relative error of the open loop gain will be decreased by (1+Aß), and the error of the feedback circuit goes 1:1 into the relative error of the closed loop gain. This is the Elec1-fb.doc 52 ELECTRONICS-1. ZOLTAI reason for using almost always the negative feedback. (We can not take advantage of the negative sign, because the sign of the relative errors is random.) Speaking of negative or positive feedback is only justified if A and ß are real quantities. Generally they are complex quantities, and the type of the feedback is a function of the frequency: E.g. -

Modern Architecture Advances Vector Network Analyzer Performance Vector Network Analyzers (Vnas) Are Based on the Use of Either Mixers Or Samplers
White Paper Modern Architecture Advances Vector Network Analyzer Performance Vector Network Analyzers (VNAs) are based on the use of either mixers or samplers. In traditional sampling VNAs, samplers are gated by pulses generated with a Step-Recovery Diode (SRD) circuit, with the Local Oscillator (LO) and RF source phase locked to a common frequency reference. An alternative architecture is a VNA based on Nonlinear Transmission Line (NLTL) samplers and distributed harmonic generators. NLTL-based samplers configured to provide scalable operation characteristics now offer a more beneficial alternative. Not only do they allow for a simplified VNA architecture, but they also enable VNAs that are much more cost effective than those employing fundamental mixing. This paper provides an overview of the high-frequency technology deployed in Anritsu’s VNA families. It is shown that NLTL technology results in miniature VNA reflectometers that provide enhanced performance over broad frequency ranges, and reduced measurement complexity when compared with existing solutions. These capabilities, combined with the frequency-scalable nature of the reflectometers provide VNA users with a unique and compelling solution for their current and future high-frequency measurement needs. Limitations of Prior VNA Architectures VNAs make use of samplers, harmonic mixers, or combinations thereof to down-convert measurement signals to intermediate frequencies (IF) before digitizing them. Such down-conversion components play a critical role in VNAs because they set bounds on important parameters like conversion efficiency, receiver compression, isolation between measurement channels, and spurious generation at the ports of a device under test (DUT). Mixers tend to be the down converters of choice at RF frequencies, due mainly to their simpler local oscillator (LO) drive system and enhanced spur-management advantages. -

MT-033: Voltage Feedback Op Amp Gain and Bandwidth
MT-033 TUTORIAL Voltage Feedback Op Amp Gain and Bandwidth INTRODUCTION This tutorial examines the common ways to specify op amp gain and bandwidth. It should be noted that this discussion applies to voltage feedback (VFB) op amps—current feedback (CFB) op amps are discussed in a later tutorial (MT-034). OPEN-LOOP GAIN Unlike the ideal op amp, a practical op amp has a finite gain. The open-loop dc gain (usually referred to as AVOL) is the gain of the amplifier without the feedback loop being closed, hence the name “open-loop.” For a precision op amp this gain can be vary high, on the order of 160 dB (100 million) or more. This gain is flat from dc to what is referred to as the dominant pole corner frequency. From there the gain falls off at 6 dB/octave (20 dB/decade). An octave is a doubling in frequency and a decade is ×10 in frequency). If the op amp has a single pole, the open-loop gain will continue to fall at this rate as shown in Figure 1A. A practical op amp will have more than one pole as shown in Figure 1B. The second pole will double the rate at which the open- loop gain falls to 12 dB/octave (40 dB/decade). If the open-loop gain has dropped below 0 dB (unity gain) before it reaches the frequency of the second pole, the op amp will be unconditionally stable at any gain. This will be typically referred to as unity gain stable on the data sheet. -
Operational Amplifiers: Part 3 Non-Ideal Behavior of Feedback
Operational Amplifiers: Part 3 Non-ideal Behavior of Feedback Amplifiers AC Errors and Stability by Tim J. Sobering Analog Design Engineer & Op Amp Addict Copyright 2014 Tim J. Sobering Finite Open-Loop Gain and Small-signal analysis Define VA as the voltage between the Op Amp input terminals Use KCL 0 V_OUT = Av x Va + + Va OUT V_OUT - Note the - Av “Loop Gain” – Avβ β V_IN Rg Rf Copyright 2014 Tim J. Sobering Liberally apply algebra… 0 0 1 1 1 1 1 1 1 1 Copyright 2014 Tim J. Sobering Get lost in the algebra… 1 1 1 1 1 1 1 Copyright 2014 Tim J. Sobering More algebra… Recall β is the Feedback Factor and define α 1 1 1 1 1 Copyright 2014 Tim J. Sobering You can apply the exact same analysis to the Non-inverting amplifier Lots of steps and algebra and hand waving yields… 1 This is very similar to the Inverting amplifier configuration 1 Note that if Av → ∞, converges to 1/β and –α /β –Rf /Rg If we can apply a little more algebra we can make this converge on a single, more informative, solution Copyright 2014 Tim J. Sobering You can apply the exact same analysis to the Non-inverting amplifier Non-inverting configuration Inverting Configuration 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 Copyright 2014 Tim J. Sobering Inverting and Non-Inverting Amplifiers “seem” to act the same way Magically, we again obtain the ideal gain times an error term If Av → ∞ we obtain the ideal gain 1 1 1 Avβ is called the Loop Gain and determines stability If Avβ –1 1180° the error term goes to infinity and you have an oscillator – this is the “Nyquist Criterion” for oscillation Gain error is obtained from the loop gain 1 For < 1% gain error, 40 dB 1 (2 decades in bandwidth!) 1 Copyright 2014 Tim J. -

Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.002 - Circuits and Electronics Fall 2004 Lab Equipment Handout (Handout F04-009) Prepared by Iahn Cajigas González (EECS '02) Updated by Ben Walker (EECS ’03) in September, 2003 This handout is intended to provide a brief technical overview of the lab instruments which we will be using in 6.002: the oscilloscope, multimeter, function generator, and the protoboard. It incorporates much of the material found in the individual instrument manuals, while including some background information as to how each of the instruments work. The goal of this handout is to serve as a reference of common lab procedures and terminology, while trying to build technical intuition about each instrument's functionality and familiarizing students with their use. Students with previous lab experience might find it helpful to simply skim over the handout and focus only on unfamiliar sections and terminology. THE OSCILLOSCOPE The oscilloscope is an electronic instrument based on the cathode ray tube (CRT) – not unlike the picture tube of a television set – which is capable of generating a graph of an input signal versus a second variable. In most applications the vertical (Y) axis represents voltage and the horizontal (X) axis represents time (although other configurations are possible). Essentially, the oscilloscope consists of four main parts: an electron gun, a time-base generator (that serves as a clock), two sets of deflection plates used to steer the electron beam, and a phosphorescent screen which lights up when struck by electrons. The electron gun, deflection plates, and the phosphorescent screen are all enclosed by a glass envelope which has been sealed and evacuated. -
Tektronix Signal Generator
Signal Generator Fundamentals Signal Generator Fundamentals Table of Contents The Complete Measurement System · · · · · · · · · · · · · · · 5 Complex Waves · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 The Signal Generator · · · · · · · · · · · · · · · · · · · · · · · · · · · · 6 Signal Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Analog or Digital? · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 7 Analog Modulation · · · · · · · · · · · · · · · · · · · · · · · · · 15 Basic Signal Generator Applications· · · · · · · · · · · · · · · · 8 Digital Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Verification · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Frequency Sweep · · · · · · · · · · · · · · · · · · · · · · · · · · · 16 Testing Digital Modulator Transmitters and Receivers · · 8 Quadrature Modulation · · · · · · · · · · · · · · · · · · · · · 16 Characterization · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Digital Patterns and Formats · · · · · · · · · · · · · · · · · · · 16 Testing D/A and A/D Converters · · · · · · · · · · · · · · · · · 8 Bit Streams · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 17 Stress/Margin Testing · · · · · · · · · · · · · · · · · · · · · · · · · · · 9 Types of Signal Generators · · · · · · · · · · · · · · · · · · · · · · 17 Stressing Communication Receivers · · · · · · · · · · · · · · 9 Analog and Mixed Signal Generators · · · · · · · · · · · · · · 18 Signal Generation Techniques -

The TL431 in the Control of Switching Power Supplies Agenda
The TL431 in the Control of Switching Power Supplies Agenda Feedback generalities The TL431 in a compensator Small-signal analysis of the return chain A type 1 implementation with the TL431 A type 2 implementation with the TL431 A type 3 implementation with the TL431 Design examples Conclusion Agenda Feedback generalities The TL431 in a compensator Small-signal analysis of the return chain A type 1 implementation with the TL431 A type 2 implementation with the TL431 A type 3 implementation with the TL431 Design examples Conclusion What is a Regulated Power Supply? Vout is permanently compared to a reference voltage Vref. The reference voltage Vref is precise and stable over temperature. The error,ε =−VVrefα out, is amplified and sent to the control input. The power stage reacts to reduce ε as much as it can. Power stage - H Vout Control d variable Error amplifier - G Rupper + - Vin - - α + + Vp Modulator - G V PWM ref Rlower How is Regulation Performed? Text books only describe op amps in compensators… Vout Verr The market reality is different: the TL431 rules! V I’m the out law! Verr TL431 optocoupler How do we Stabilize a Converter? We need a high gain at dc for a low static error We want a sufficiently high crossover frequency for response speed ¾ Shape the compensator G(s) to build phase and gain margins! Ts( ) fc = 6.5 kHz 0° -0 dB ∠Ts( ) -88° GM = 67 dB ϕm = 92° -180° Ts( ) =−67 dB 10 100 1k 10k 100k 1Meg How Much Phase Margin to Chose? a Q factor of 0.5 (critical response) implies a ϕm of 76° a 45° ϕm corresponds -
Simple RF-Power Measurement
By Wes Hayward, W7ZOI, and Bob Larkin, W7PUA Simple RF-Power Measurement Making power PHOTO S BY JOE BO TTIGLIERI, AA1G measurements from W nanowatts to 100 watts is easy with these simple homebrewed instruments! easuring RF power is central to power indicators. power meter, extending the upper limit by almost everything that we do as The power-measuring system de- 40 dB, allowing measurement of up to Mradio amateurs and experiment- scribed here is based on a recently intro- 100 W (+50 dBm). ers. Those applications range from sim- duced IC from Analog Devices: the ply measuring the power output of our AD8307. The core of this system is a The Power Meter transmitters to our workbench experi- battery operated instrument that allows The cornerstone of the power-meter mentations that call for measuring the LO us to directly measure signals of over circuit shown in Figure 1 is an Analog power applied to the mixers within our 20 mW (+13 dBm) to less than 0.1 nW Devices AD8307AN logarithmic amplifier receivers. Even our receiver S meters are (−70 dBm). A tap circuit supplements the IC, U1. Although you might consider the 1 Figure 1—Schematic of the 1- to 500-MHz wattmeter. Unless otherwise specified, resistors are /4-W 5%-tolerance carbon- composition or metal-film units. Equivalent parts can be substituted; n.c. indicates no connection. Most parts are available from Kanga US; see Note 2. J1—N or BNC connector S1—SPST toggle Misc: See Note 2; copper-clad board, 3 L1—1 turn of a C1 lead, /16-inch ID; see U1—AD8307; see Note 1. -
The Essential Signal Generator Guide Building a Solid Foundation in RF – Part 2
The Essential Signal Generator Guide Building a Solid Foundation in RF – Part 2 Introduction Having a robust and reliable high-speed wireless connection helps win and retain customers. It has quickly become a requirement for doing business. In order to meet this requirement, you need the right signal generator. As frequency spectrum is a finite resource, complex modulation schemes are needed to increase spectral efficiency, which allows for far higher data rates. Unfortunately, complex modulation schemes depend on accurate and stable signal generators to work effectively. With all the specifications and features available out there, getting the right signal generator for the job can be a daunting task. In this second part of our two-part white paper, we help you gain a sound understanding of various modulation schemes, the importance of spectral purity, and how distortion can help you. We will also explore how you can use smart software to significantly improve your productivity. Find us at www.keysight.com Page 1 Contents In Part 2 of our two-part eBook, we will highlight more advanced features such as modulation, spectral purity, and distortion. We introduced the signal generator and looked at basic specifications such as power, accuracy, and speed in Part 1. Section 5. IQ Modulation Learn about basic I/Q modulation and its key characteristics, and stress-test your designs with I/Q impairments. Section 6. Spectral Purity Spectral purity performance is a key factor in obtaining accurate measurements. Understand phase noise requirements in signal generation. Section 7. Distortion Performance Get to know the different types of distortions and why they matter to your measurements.