The Amazing Normal Forces
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the History of the Radiation Reaction1 Kirk T
On the History of the Radiation Reaction1 Kirk T. McDonald Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544 (May 6, 2017; updated March 18, 2020) 1 Introduction Apparently, Kepler considered the pointing of comets’ tails away from the Sun as evidence for radiation pressure of light [2].2 Following Newton’s third law (see p. 83 of [3]), one might suppose there to be a reaction of the comet back on the incident light. However, this theme lay largely dormant until Poincar´e (1891) [37, 41] and Planck (1896) [46] discussed the effect of “radiation damping” on an oscillating electric charge that emits electromagnetic radiation. Already in 1892, Lorentz [38] had considered the self force on an extended, accelerated charge e, finding that for low velocity v this force has the approximate form (in Gaussian units, where c is the speed of light in vacuum), independent of the radius of the charge, 3e2 d2v 2e2v¨ F = = . (v c). (1) self 3c3 dt2 3c3 Lorentz made no connection at the time between this force and radiation, which connection rather was first made by Planck [46], who considered that there should be a damping force on an accelerated charge in reaction to its radiation, and by a clever transformation arrived at a “radiation-damping” force identical to eq. (1). Today, Lorentz is often credited with identifying eq. (1) as the “radiation-reaction force”, and the contribution of Planck is seldom acknowledged. This note attempts to review the history of thoughts on the “radiation reaction”, which seems to be in conflict with the brief discussions in many papers and “textbooks”.3 2 What is “Radiation”? The “radiation reaction” would seem to be a reaction to “radiation”, but the concept of “radiation” is remarkably poorly defined in the literature. -

Forces Different Types of Forces
Forces and motion are a part of your everyday life for example pushing a trolley, a horse pulling a rope, speed and acceleration. Force and motion causes objects to move but also to stay still. Motion is simply a movement but needs a force to move. There are 2 types of forces, contact forces and act at a distance force. Forces Every day you are using forces. Force is basically push and pull. When you push and pull you are applying a force to an object. If you are Appling force to an object you are changing the objects motion. For an example when a ball is coming your way and then you push it away. The motion of the ball is changed because you applied a force. Different Types of Forces There are more forces than push or pull. Scientists group all these forces into two groups. The first group is contact forces, contact forces are forces when 2 objects are physically interacting with each other by touching. The second group is act at a distance force, act at a distance force is when 2 objects that are interacting with each other but not physically touching. Contact Forces There are different types of contact forces like normal Force, spring force, applied force and tension force. Normal force is when nothing is happening like a book lying on a table because gravity is pulling it down. Another contact force is spring force, spring force is created by a compressed or stretched spring that could push or pull. Applied force is when someone is applying a force to an object, for example a horse pulling a rope or a boy throwing a snow ball. -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -
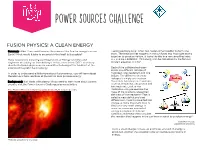
Power Sources Challenge
POWER SOURCES CHALLENGE FUSION PHYSICS! A CLEAN ENERGY Summary: What if we could harness the power of the Sun for energy here on Fusion reactions occur when two nuclei come together to form one Earth? What would it take to accomplish this feat? Is it possible? atom. The reaction that happens in the sun fuses two Hydrogen atoms together to produce Helium. It looks like this in a very simplified way: Many researchers including our Department of Energy scientists and H + H He + ENERGY. This energy can be calculated by the famous engineers are taking on this challenge! In fact, there is one DOE Laboratory Einstein equation, E = mc2. devoted to fusion physics and is committed to being at the forefront of the science of magnetic fusion energy. Each of the colliding hydrogen atoms is a different isotope of In order to understand a little more about fusion energy, you will learn about hydrogen, one deuterium and one the atom and how reactions at the atomic level produce energy. tritium. The difference in these isotopes is simply one neutron. Background: It all starts with plasma! If you need to learn more about plasma Deuterium has one proton and one physics, visit the Power Sources Challenge plasma activities. neutron, tritium has one proton and two neutrons. Look at the The Fusion Reaction that happens in the SUN looks like this: illustration—do you see how the mass of the products is less than the mass of the reactants? That is called a mass deficit and that difference in mass is converted into energy. -

Ground Reaction Force Prediction During Weighted Leg Press and Weighted Squat in a Flywheel Exercise Device
DEGREE PROJECT IN MEDICAL ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2017 Ground Reaction Force Prediction during Weighted Leg Press and Weighted Squat in a Flywheel Exercise Device Estimering av markreaktionskraften vid viktad benpress och viktad knäböj i ett svänghjulsbaserat träningsredskap TOBIAS MUNKHAMMAR KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF TECHNOLOGY AND HEALTH Acknowledgement First of I would like to thank my supervisor, Maria J¨onsson,for guidance and encouragement during the whole project and Lena Norrbrand, who, together with Maria collected all experi- mental data used in this study. Furthermore, my thanks goes to Rodrigo Moreno, Jan H¨ornfeldt, Jonathan Munkhammar and Ola Eiken for proof-reading and general feedback on the report and Elena Gutierrez Farewik, for being a link towards the musculoskeletal software company whenever the licence struggled. Lastly, I would like to thank all people at the Department of Environmental Physiology, for making me feel welcome and showing interest in my work. Abstract When performing a biomechanical analysis of human movement, knowledge about the ground reaction force (GRF) is necessary to compute forces and moments within joints. This is important when analysing a movement and its effect on the human body. To obtain knowledge about the GRF, the gold standard is to use force plates which directly measure all three components of the GRF (mediolateral, anteroposterior and normal). However, force plates are heavy, clunky and expensive, setting constraints on possible experimental setups, which make it desirable to exclude them and instead use a predictive method to obtain the full GRF. Several predictive methods exist. The node model is a GRF predictive method included in a musculoskeletal modeling software. -

Physics 101 Today Chapter 5: Newton's Third
Physics 101 Today Chapter 5: Newton’s Third Law First, let’s clarify notion of a force : Previously defined force as a push or pull. Better to think of force as an interaction between two objects. You can’t push anything without it pushing back on you ! Whenever one object exerts a force on a second object, the second object exerts an equal and opposite force on the first. Newton’s 3 rd Law - often called “action-reaction ” Eg. Leaning against a wall. You push against the wall. The wall is also pushing on you, equally hard – normal/support force. Now place a piece of paper between the wall and hand. Push on it – it doesn’t accelerate must be zero net force. The wall is pushing equally as hard (normal force) on the paper in the opposite direction to your hand, resulting in zero Fnet . This is more evident when hold a balloon against the wall – it is squashed on both sides. Eg. You pull on a cart. It accelerates. The cart pulls back on you (you feel the rope get tighter). Can call your pull the “ action ” and cart’s pull the “ reaction ”. Or, the other way around. • Newton’s 3 rd law means that forces always come in action -reaction pairs . It doesn’t matter which is called the action and which is called the reaction. • Note: Action-reaction pairs never act on the same object Examples of action-reaction force pairs In fact it is the road’s push that makes the car go forward. Same when we walk – push back on floor, floor pushes us forward. -

2 Simple Machines
Name Class Date CHAPTER 13 Work and Energy SECTION 2 Simple Machines KEY IDEAS As you read this section, keep these questions in mind: • What are simple machines? • What simple machines are in the lever family? • What simple machines are in the inclined plane family? • What are compound machines? What Are Simple Machines? We are surrounded by many different electronics and READING TOOLBOX machines. In physics, a machine is a mechanical device Compare As you read that changes the motion of an object. Remember that this section, make a chart machines make work easier by changing the way a force showing the similarities and is applied. Many machines, such as cars and bicycles, differences between the six simple machines. Describe are complicated. However, even the most complicated how each machine affects machine is made from a combination of just six simple input and output forces machines. Simple machines are the most basic machines. and distances. Include the Scientists divide the six simple machines into two fam- mechanical advantage each machine provides. ilies: the lever family and the inclined plane family. The lever family includes the simple lever, the pulley, and the wheel and axle. The inclined plane family includes the simple inclined plane, the wedge, and the screw. The lever family Simple lever Pulley EHHDBG@<EHL>K Wheel and axle 1. Infer What do you think The is the reason that the wedge inclined and the simple inclined plane plane are in the same family of simple machines? family Screw Simple inclined Wedge plane How Do Levers Work? If you have ever used a claw hammer to remove a nail from a piece of wood, you have used a simple lever. -

HW 6, Question 1: Forces in a Rotating Frame
HW 6, Question 1: Forces in a Rotating Frame Consider a solid platform, like a \merry-go round", that rotates with respect to an inertial frame of reference. It is oriented in the xy plane such that the axis of rotation is in the z-direction, i.e. ! = !z^, which we can take to point out of the page. Now, let us also consider a person walking on the rotating platform, such that this person is walking radially outward on the platform with respect to their (non-inertial) reference frame with velocity v = vr^. In what follows for Question 1, directions in the non-inertial reference frame (i.e. the frame of the walking person) are defined in the following manner: the x0-direction points directly outward from the center of the merry-go round; the y0 points in the tangential direction of rotation in the plane of the platform; and the z0-direction points out of the page, and in the same direction as the z-direction for the inertial reference frame. (a) Identify all forces. Since the person's reference frame is non-inertial, we need to account for the various fictitious forces given the description above, as well as any other external/reaction forces. The angular rate of rotation is constant, and so the Euler force Feul = m(!_ × r) = ~0. The significant forces acting on the person are: 0 • the force due to gravity, Fg = mg = mg(−z^ ), 2 0 • the (fictitious) centrifugal force, Fcen = m! × (! × r) = m! rx^ , 0 • the (fictitious) Coriolis force, Fcor = 2mv × ! = 2m!v(−y^ ), • the normal force the person experiences from the rotating platform N = Nz^0, and • a friction force acting on the person, f, in the x0y0 plane. -
Rokenbok Snapstack Student Engineering Workbook
Inclined Plane v2.0 Progression: Applications in Design & Engineering - Section 1 Student Engineering Workbook Team Members: Total Points 1. 3. Workbook: /22 pts 2. 4. Challenge: /30 pts Key Terms Write the definitions of each key term in the space provided. 1. Simple Machine: 2. Inclined Plane: 3. Rise: 4. Mechanical Advantage: 5. Force: 6. Work: 7. Effort: 8. Load: 1 Learn, Build & Modify Elements of an Inclined Plane There are two basic elements of an inclined plane. Identify the correct element in the spaces provided. 9. 10. 9. 10. Purpose of an Inclined Plane Fill in the blanks below. 11. Purpose: 12. The inclined plane makes work easier by __________________ the amount of effort that must be applied to raise or lower a load. 13. To reduce the amount of effort needed to raise or lower an object in an inclined plane, the length of the slope should be _______________________. (extended or reduced) Build and Modify Place a check in the boxes below as the team completes each step. 14. Build Rokenbok Inclined Plane 15. Test Inclined Plane - Step 1 16. Test Inclined Plane - Step 2 2 Build & Modify Understanding Mechanical Advantage Fill in the blanks in the statements below. 17. Mechanical Advantage exists when the ______________________ force of a machine is _____________________ than the ____________________ force that was applied to it. 18. For a machine to create mechanical advantage, it must trade increased time or ____________________ for reduced effort. Mechanical Advantage in an Inclined Plane Use the formula for calculating mechanical advantage to solve the Example 1 - Inclined Plane problems below. -

Chapter 8 Glossary
Technology: Engineering Our World © 2012 Chapter 8: Machines—Glossary friction. A force that acts like a brake on moving objects. gear. A rotating wheel-like object with teeth around its rim used to transmit force to other gears with matching teeth. hydraulics. The study and technology of the characteristics of liquids at rest and in motion. inclined plane. A simple machine in the form of a sloping surface or ramp, used to move a load from one level to another. lever. A simple machine that consists of a bar and fulcrum (pivot point). Levers are used to increase force or decrease the effort needed to move a load. linkage. A system of levers used to transmit motion. lubrication. The application of a smooth or slippery substance between two objects to reduce friction. machine. A device that does some kind of work by changing or transmitting energy. mechanical advantage. In a simple machine, the ability to move a large resistance by applying a small effort. mechanism. A way of changing one kind of effort into another kind of effort. moment. The turning force acting on a lever; effort times the distance of the effort from the fulcrum. pneumatics. The study and technology of the characteristics of gases. power. The rate at which work is done or the rate at which energy is converted from one form to another or transferred from one place to another. pressure. The effort applied to a given area; effort divided by area. pulley. A simple machine in the form of a wheel with a groove around its rim to accept a rope, chain, or belt; it is used to lift heavy objects. -

3657 SIMPLE MACHINES: INCLINED PLANE, WEDGE and SCREW Grade Levels: 7-12 15 Minutes CAMBRIDGE EDUCATIONAL 1998
#3657 SIMPLE MACHINES: INCLINED PLANE, WEDGE AND SCREW Grade Levels: 7-12 15 minutes CAMBRIDGE EDUCATIONAL 1998 DESCRIPTION Uses animated graphics and real examples to illustrate an inclined plane, wedge, and screw. Offers a definition of each and examines the relationship between the three. Shows how they have been used historically. Also defines simple machines and mechanical advantage. Reviews main concepts. ACADEMIC STANDARDS Subject Area: Science ¨ Standard: Understands motion and the principles that explain it · Benchmark: Knows the relationship between the strength of a force and its effect on an object (e.g., the greater the force, the greater the change in motion; the more massive the object, the smaller the effect of a given force) · Benchmark: Knows that when a force is applied to an object, the object either speeds up, slows down, or goes in a different direction Subject Area: Historical Understanding ¨ Standard: Understands and knows how to analyze chronological relationships and patterns · Benchmark: Knows how to construct time lines in significant historical developments that mark at evenly spaced intervals the years, decades, and centuries · Benchmark: Knows how to identify patterns of change and continuity in the history of the community, state, and nation, and in the lives of people of various cultures from times long ago until today AFTER SHOWING 1. Point out objects in the classroom that incorporate inclined planes, wedges and screws. 2. Dissect a toy or household gadget. Record progress in science notebooks with written notations and drawings. Identify each part as to type of simple machine and function. 3. Study the history of simple machines. -

A Short History of Physics (Pdf)
A Short History of Physics Bernd A. Berg Florida State University PHY 1090 FSU August 28, 2012. References: Most of the following is copied from Wikepedia. Bernd Berg () History Physics FSU August 28, 2012. 1 / 25 Introduction Philosophy and Religion aim at Fundamental Truths. It is my believe that the secured part of this is in Physics. This happend by Trial and Error over more than 2,500 years and became systematic Theory and Observation only in the last 500 years. This talk collects important events of this time period and attaches them to the names of some people. I can only give an inadequate presentation of the complex process of scientific progress. The hope is that the flavor get over. Bernd Berg () History Physics FSU August 28, 2012. 2 / 25 Physics From Acient Greek: \Nature". Broadly, it is the general analysis of nature, conducted in order to understand how the universe behaves. The universe is commonly defined as the totality of everything that exists or is known to exist. In many ways, physics stems from acient greek philosophy and was known as \natural philosophy" until the late 18th century. Bernd Berg () History Physics FSU August 28, 2012. 3 / 25 Ancient Physics: Remarkable people and ideas. Pythagoras (ca. 570{490 BC): a2 + b2 = c2 for rectangular triangle: Leucippus (early 5th century BC) opposed the idea of direct devine intervention in the universe. He and his student Democritus were the first to develop a theory of atomism. Plato (424/424{348/347) is said that to have disliked Democritus so much, that he wished his books burned.