Analysis of Standing Vertical Jumps Using a Force Platform Nicholas P
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

On the History of the Radiation Reaction1 Kirk T
On the History of the Radiation Reaction1 Kirk T. McDonald Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544 (May 6, 2017; updated March 18, 2020) 1 Introduction Apparently, Kepler considered the pointing of comets’ tails away from the Sun as evidence for radiation pressure of light [2].2 Following Newton’s third law (see p. 83 of [3]), one might suppose there to be a reaction of the comet back on the incident light. However, this theme lay largely dormant until Poincar´e (1891) [37, 41] and Planck (1896) [46] discussed the effect of “radiation damping” on an oscillating electric charge that emits electromagnetic radiation. Already in 1892, Lorentz [38] had considered the self force on an extended, accelerated charge e, finding that for low velocity v this force has the approximate form (in Gaussian units, where c is the speed of light in vacuum), independent of the radius of the charge, 3e2 d2v 2e2v¨ F = = . (v c). (1) self 3c3 dt2 3c3 Lorentz made no connection at the time between this force and radiation, which connection rather was first made by Planck [46], who considered that there should be a damping force on an accelerated charge in reaction to its radiation, and by a clever transformation arrived at a “radiation-damping” force identical to eq. (1). Today, Lorentz is often credited with identifying eq. (1) as the “radiation-reaction force”, and the contribution of Planck is seldom acknowledged. This note attempts to review the history of thoughts on the “radiation reaction”, which seems to be in conflict with the brief discussions in many papers and “textbooks”.3 2 What is “Radiation”? The “radiation reaction” would seem to be a reaction to “radiation”, but the concept of “radiation” is remarkably poorly defined in the literature. -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -
Power Sources Challenge
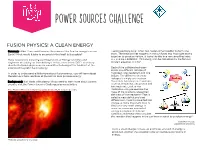
POWER SOURCES CHALLENGE FUSION PHYSICS! A CLEAN ENERGY Summary: What if we could harness the power of the Sun for energy here on Fusion reactions occur when two nuclei come together to form one Earth? What would it take to accomplish this feat? Is it possible? atom. The reaction that happens in the sun fuses two Hydrogen atoms together to produce Helium. It looks like this in a very simplified way: Many researchers including our Department of Energy scientists and H + H He + ENERGY. This energy can be calculated by the famous engineers are taking on this challenge! In fact, there is one DOE Laboratory Einstein equation, E = mc2. devoted to fusion physics and is committed to being at the forefront of the science of magnetic fusion energy. Each of the colliding hydrogen atoms is a different isotope of In order to understand a little more about fusion energy, you will learn about hydrogen, one deuterium and one the atom and how reactions at the atomic level produce energy. tritium. The difference in these isotopes is simply one neutron. Background: It all starts with plasma! If you need to learn more about plasma Deuterium has one proton and one physics, visit the Power Sources Challenge plasma activities. neutron, tritium has one proton and two neutrons. Look at the The Fusion Reaction that happens in the SUN looks like this: illustration—do you see how the mass of the products is less than the mass of the reactants? That is called a mass deficit and that difference in mass is converted into energy. -

The Local Biomechanical Analysis of Lower Limb on Counter- Movement Jump Between Barefoot and Shod People with Different Foot Morphology
38th International Society of Biomechanics in Sport Conference, Physical conference cancelled, Online Activities: July 20-24, 2020 THE LOCAL BIOMECHANICAL ANALYSIS OF LOWER LIMB ON COUNTER- MOVEMENT JUMP BETWEEN BAREFOOT AND SHOD PEOPLE WITH DIFFERENT FOOT MORPHOLOGY Zhiqiang Liang1,2 Jiabin Yu1,2 Yaodong Gu1,2 and Jianshe Li1 Research academy of grand health, Ningbo University, Ningbo, China1 Faculty of sports science, Ningbo University, Ningbo, China2 The aim of this study was to explore the kinematic variations in knee and ankle joints and the ground reaction force between habitually barefoot (HBM) and shod males (HSM) during countermovement jump. Twenty-eight males (14 HBM,14 HSM) participated in this experiment. An 8-camera Vicon motion system was used to collect the kinematic data of knee and ankle joints from 3 dimensions and the force plate was used to collect the ground reaction force in take-off phase. Results in take-off phase showed that HSM produced two peak forces to take off and showed significantly greater knee ROM in sagittal plane, as well as greater ankle inversion and external rotation. In conclusion, the foot morphological differences can result in the different influence on jump performance. The relevant practioner should pay close attention to the effect of foot morphology on jump in training. KEYWORDS: foot morphology; vertical jump performance; ground reaction force; kinematics. INTRODUCTION: Habitually barefoot population (HBM) has some differences in morphology compared to habitually shod population (HSM) when running (Lieberman et al., 2010), which can lead to different performance and partly reduce sports injuries (Lieberman et al., 2010). Biomechanical studies reported that the separated large toe of HBM and the other toes of HSM had the specific prehensile function (Ashizawa et al., 1997); these characteristics lead to load and initiate larger push forces for take-off (Tam et al., 2016). -

Elvis Presley Music
Vogue Madonna Take on Me a-ha Africa Toto Sweet Dreams (Are Made of This) Eurythmics You Make My Dreams Daryl Hall and John Oates Taited Love Soft Cell Don't You (Forget About Me) Simple Minds Heaven Is a Place on Earth Belinda Carlisle I'm Still Standing Elton John Wake Me Up Before You Go-GoWham! Blue Monday New Order Superstition Stevie Wonder Move On Up Curtis Mayfield For Once In My Life Stevie Wonder Red Red Wine UB40 Send Me On My Way Rusted Root Hungry Eyes Eric Carmen Good Vibrations The Beach Boys MMMBop Hanson Boom, Boom, Boom!! Vengaboys Relight My Fire Take That, LuLu Picture Of You Boyzone Pray Take That Shoop Salt-N-Pepa Doo Wop (That Thing) Ms Lauryn Hill One Week Barenaked Ladies In the Summertime Shaggy, Payvon Bills, Bills, Bills Destiny's Child Miami Will Smith Gonna Make You Sweat (Everbody Dance Now) C & C Music Factory Return of the Mack Mark Morrison Proud Heather Small Ironic Alanis Morissette Don't You Want Me The Human League Just Cant Get Enough Depeche Mode The Safety Dance Men Without Hats Eye of the Tiger Survivor Like a Prayer Madonna Rocket Man Elton John My Generation The Who A Little Less Conversation Elvis Presley ABC The Jackson 5 Lessons In Love Level 42 In the Air Tonight Phil Collins September Earth, Wind & Fire In Your Eyes Kylie Minogue I Want You Back The Jackson 5 Jump (For My Love) The Pointer Sisters Rock the Boat Hues Corportation Jolene Dolly Parton Never Too Much Luther Vandross Kiss Prince Karma Chameleon Culture Club Blame It On the Boogie The Jacksons Everywhere Fleetwood Mac Beat It -

Specific Skills Check List © Ruth Ring Harvie 1990 1
Specific Skills Check List © Ruth Ring Harvie 1990 1. Mounting and dismounting correctly 2. Holding reins correctly 3. Lengthening and shortening reins correctly 4. Adjusting both stirrups and girth correctly when mounted 5. Adjusting stirrups correctly at walk 6. Demonstrate correct position at walk and trot 7. Pick up and drop stirrups correctly at walk and trot. 8. Demonstrate basic balanced position used with control in arena and in the open 9. Demonstrate changes of direction at walk and trot 10. Demonstrate gradual transitions using reins, seat, legs, correctly 11. Mount and dismount from each side correctly. 12. Maintain basic balanced position at walk/trot/canter transitions in both directions 13. Demonstrate and use correct aids for canter departures both directions 14. Demonstrate correct trot/canter transitions 15. Demonstrate correct jumping position at walk/trot/canter maintaining balance and stability of gaits. 16. Demonstrate balancing and suppling exercises for rider. Demonstrate same for horse. 17. Demonstrate correct effective jumping position at walk/trot/canter on both reins using aids correctly. 18. Maintain correct and effective position (basic, balanced position for flat-work, basic, balanced position for jumping) at walk/trot/canter without stirrups. 19. Know when diagonals are correct for riding at rising trot in ALL of the above 20. Aids for canter transitions given correctly and effectively at trot/canter and walk/canter transitions 21. Demonstrate an understanding of the skill of changing leads at canter, how to change leads if horse takes the wrong lead, and how to school leads correctly 22. Know how to demonstrate jumping position and effectiveness through use of a correct base of support and necessary changes in, adjusting the knee ,ankle, hip and elbow angles for maintaining functionally correct position through grids/courses and in the open 23. -

The Uk's Top 200 Most Requested Songs in 1980'S
The Uk’s top 200 most requested songs in 1980’s 1. Billie Jean - Michael Jackson 2. Into the Groove - Madonna 3. Super Freak Part I - Rick James 4. Beat It - Michael Jackson 5. Funkytown - Lipps Inc. 6. Sweet Dreams (Are Made of This) - Eurythmics 7. Don't You Want Me? - Human League 8. Tainted Love - Soft Cell 9. Like a Virgin - Madonna 10. Blue Monday - New Order 11. When Doves Cry - Prince 12. What I Like About You - The Romantics 13. Push It - Salt N Pepa 14. Celebration - Kool and The Gang 15. Flashdance...What a Feeling - Irene Cara 16. It's Raining Men - The Weather Girls 17. Holiday - Madonna 18. Thriller - Michael Jackson 19. Bad - Michael Jackson 20. 1999 - Prince 21. The Way You Make Me Feel - Michael Jackson 22. I'm So Excited - The Pointer Sisters 23. Electric Slide - Marcia Griffiths 24. Mony Mony - Billy Idol 25. I'm Coming Out - Diana Ross 26. Girls Just Wanna Have Fun - Cyndi Lauper 27. Take Your Time (Do It Right) - The S.O.S. Band 28. Let the Music Play - Shannon 29. Pump Up the Jam - Technotronic feat. Felly 30. Planet Rock - Afrika Bambaataa and The Soul Sonic Force 31. Jump (For My Love) - The Pointer Sisters 32. Fame (I Want To Live Forever) - Irene Cara 33. Let's Groove - Earth, Wind, and Fire 34. It Takes Two (To Make a Thing Go Right) - Rob Base and DJ EZ Rock 35. Pump Up the Volume - M/A/R/R/S 36. I Wanna Dance With Somebody (Who Loves Me) - Whitney Houston 37. -

Physics 101 Today Chapter 5: Newton's Third
Physics 101 Today Chapter 5: Newton’s Third Law First, let’s clarify notion of a force : Previously defined force as a push or pull. Better to think of force as an interaction between two objects. You can’t push anything without it pushing back on you ! Whenever one object exerts a force on a second object, the second object exerts an equal and opposite force on the first. Newton’s 3 rd Law - often called “action-reaction ” Eg. Leaning against a wall. You push against the wall. The wall is also pushing on you, equally hard – normal/support force. Now place a piece of paper between the wall and hand. Push on it – it doesn’t accelerate must be zero net force. The wall is pushing equally as hard (normal force) on the paper in the opposite direction to your hand, resulting in zero Fnet . This is more evident when hold a balloon against the wall – it is squashed on both sides. Eg. You pull on a cart. It accelerates. The cart pulls back on you (you feel the rope get tighter). Can call your pull the “ action ” and cart’s pull the “ reaction ”. Or, the other way around. • Newton’s 3 rd law means that forces always come in action -reaction pairs . It doesn’t matter which is called the action and which is called the reaction. • Note: Action-reaction pairs never act on the same object Examples of action-reaction force pairs In fact it is the road’s push that makes the car go forward. Same when we walk – push back on floor, floor pushes us forward. -

How Much Muscle Strength Is Required to Walk in a Crouch Gait?
Journal of Biomechanics 45 (2012) 2564–2569 Contents lists available at SciVerse ScienceDirect Journal of Biomechanics journal homepage: www.elsevier.com/locate/jbiomech www.JBiomech.com How much muscle strength is required to walk in a crouch gait? Katherine M. Steele a, Marjolein M. van der Krogt c,d, Michael H. Schwartz e,f, Scott L. Delp a,b,n a Department of Mechanical Engineering, Stanford University, Stanford, CA, USA bDepartment of Bioengineering, Stanford University, Stanford, CA, USA c Department of Rehabilitation Medicine, Research Institute MOVE,VU University Medical Center, Amsterdam, The Netherlands d Laboratory of Biomechanical Engineering, University of Twente, Enschede, The Netherlands e Gillette Children’s Specialty Healthcare, Stanford University, St. Paul, MN, USA f Department of Orthopaedic Surgery, University of Minnesota, Minneapolis, MN, USA article info abstract Article history: Muscle weakness is commonly cited as a cause of crouch gait in individuals with cerebral palsy; Accepted 27 July 2012 however, outcomes after strength training are variable and mechanisms by which muscle weakness may contribute to crouch gait are unclear. Understanding how much muscle strength is required to Keywords: walk in a crouch gait compared to an unimpaired gait may provide insight into how muscle weakness Cerebral palsy contributes to crouch gait and assist in the design of strength training programs. The goal of this study Crouch gait was to examine how much muscle groups could be weakened before crouch gait becomes impossible. Strength To investigate this question, we first created muscle-driven simulations of gait for three typically Muscle developing children and six children with cerebral palsy who walked with varying degrees of crouch Simulation severity. -

HW 6, Question 1: Forces in a Rotating Frame
HW 6, Question 1: Forces in a Rotating Frame Consider a solid platform, like a \merry-go round", that rotates with respect to an inertial frame of reference. It is oriented in the xy plane such that the axis of rotation is in the z-direction, i.e. ! = !z^, which we can take to point out of the page. Now, let us also consider a person walking on the rotating platform, such that this person is walking radially outward on the platform with respect to their (non-inertial) reference frame with velocity v = vr^. In what follows for Question 1, directions in the non-inertial reference frame (i.e. the frame of the walking person) are defined in the following manner: the x0-direction points directly outward from the center of the merry-go round; the y0 points in the tangential direction of rotation in the plane of the platform; and the z0-direction points out of the page, and in the same direction as the z-direction for the inertial reference frame. (a) Identify all forces. Since the person's reference frame is non-inertial, we need to account for the various fictitious forces given the description above, as well as any other external/reaction forces. The angular rate of rotation is constant, and so the Euler force Feul = m(!_ × r) = ~0. The significant forces acting on the person are: 0 • the force due to gravity, Fg = mg = mg(−z^ ), 2 0 • the (fictitious) centrifugal force, Fcen = m! × (! × r) = m! rx^ , 0 • the (fictitious) Coriolis force, Fcor = 2mv × ! = 2m!v(−y^ ), • the normal force the person experiences from the rotating platform N = Nz^0, and • a friction force acting on the person, f, in the x0y0 plane. -

A Short History of Physics (Pdf)
A Short History of Physics Bernd A. Berg Florida State University PHY 1090 FSU August 28, 2012. References: Most of the following is copied from Wikepedia. Bernd Berg () History Physics FSU August 28, 2012. 1 / 25 Introduction Philosophy and Religion aim at Fundamental Truths. It is my believe that the secured part of this is in Physics. This happend by Trial and Error over more than 2,500 years and became systematic Theory and Observation only in the last 500 years. This talk collects important events of this time period and attaches them to the names of some people. I can only give an inadequate presentation of the complex process of scientific progress. The hope is that the flavor get over. Bernd Berg () History Physics FSU August 28, 2012. 2 / 25 Physics From Acient Greek: \Nature". Broadly, it is the general analysis of nature, conducted in order to understand how the universe behaves. The universe is commonly defined as the totality of everything that exists or is known to exist. In many ways, physics stems from acient greek philosophy and was known as \natural philosophy" until the late 18th century. Bernd Berg () History Physics FSU August 28, 2012. 3 / 25 Ancient Physics: Remarkable people and ideas. Pythagoras (ca. 570{490 BC): a2 + b2 = c2 for rectangular triangle: Leucippus (early 5th century BC) opposed the idea of direct devine intervention in the universe. He and his student Democritus were the first to develop a theory of atomism. Plato (424/424{348/347) is said that to have disliked Democritus so much, that he wished his books burned. -

Trust Nurse Delivers His Own Baby
May 2006 - No. 143 Chelsea and Westminster Healthcare NHS Trust Trust NEWS G Focus on TB G Sexual health In this – page 5 superheroes issue... – page 3 G Hand Hygiene Awareness Week – pages 8 and 9 Trust nurse delivers Stories of babies being born in the back seats of taxis and in hospital car his own baby parks are sometimes dismissed as little more than urban myth – but I Neil Williams and wife Kay the amazing real life celebrate the birth of baby Noah with their older son Ben and the experience of Trust nurse midwife and ambulance crew Neil Williams suggests who were happy to let Neil otherwise. deliver his own son Paediatric Charge Nurse Neil, who is based on the children’s High Dependency Unit at Chelsea and Westminster, ended up delivering his second child Noah after wife Kay’s labour progressed rather more quickly than expected! Their incredible story is featured in the May edition of Mother & Baby magazine following Noah’s ‘adventurous’ birth in December. Neil explained: “I was “The midwife called back Noah arrived after another after the surprise home birth. getting ready to come to and I knew immediately she couple of minutes.” The Mother & Baby article work when Kay said she felt wasn’t going to get to us in Neil can now see the focuses on a mother’s a twinge and that perhaps time but the London funny side of the highly experience of childbirth we should head for our local Ambulance Service control unusual circumstances in without painkillers and, hospital.