Newton's Third Law (Lecture 7) Example the Bouncing Ball You Can Move
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Rotational Motion (The Dynamics of a Rigid Body)
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln Robert Katz Publications Research Papers in Physics and Astronomy 1-1958 Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body) Henry Semat City College of New York Robert Katz University of Nebraska-Lincoln, [email protected] Follow this and additional works at: https://digitalcommons.unl.edu/physicskatz Part of the Physics Commons Semat, Henry and Katz, Robert, "Physics, Chapter 11: Rotational Motion (The Dynamics of a Rigid Body)" (1958). Robert Katz Publications. 141. https://digitalcommons.unl.edu/physicskatz/141 This Article is brought to you for free and open access by the Research Papers in Physics and Astronomy at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in Robert Katz Publications by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. 11 Rotational Motion (The Dynamics of a Rigid Body) 11-1 Motion about a Fixed Axis The motion of the flywheel of an engine and of a pulley on its axle are examples of an important type of motion of a rigid body, that of the motion of rotation about a fixed axis. Consider the motion of a uniform disk rotat ing about a fixed axis passing through its center of gravity C perpendicular to the face of the disk, as shown in Figure 11-1. The motion of this disk may be de scribed in terms of the motions of each of its individual particles, but a better way to describe the motion is in terms of the angle through which the disk rotates. -

On the History of the Radiation Reaction1 Kirk T
On the History of the Radiation Reaction1 Kirk T. McDonald Joseph Henry Laboratories, Princeton University, Princeton, NJ 08544 (May 6, 2017; updated March 18, 2020) 1 Introduction Apparently, Kepler considered the pointing of comets’ tails away from the Sun as evidence for radiation pressure of light [2].2 Following Newton’s third law (see p. 83 of [3]), one might suppose there to be a reaction of the comet back on the incident light. However, this theme lay largely dormant until Poincar´e (1891) [37, 41] and Planck (1896) [46] discussed the effect of “radiation damping” on an oscillating electric charge that emits electromagnetic radiation. Already in 1892, Lorentz [38] had considered the self force on an extended, accelerated charge e, finding that for low velocity v this force has the approximate form (in Gaussian units, where c is the speed of light in vacuum), independent of the radius of the charge, 3e2 d2v 2e2v¨ F = = . (v c). (1) self 3c3 dt2 3c3 Lorentz made no connection at the time between this force and radiation, which connection rather was first made by Planck [46], who considered that there should be a damping force on an accelerated charge in reaction to its radiation, and by a clever transformation arrived at a “radiation-damping” force identical to eq. (1). Today, Lorentz is often credited with identifying eq. (1) as the “radiation-reaction force”, and the contribution of Planck is seldom acknowledged. This note attempts to review the history of thoughts on the “radiation reaction”, which seems to be in conflict with the brief discussions in many papers and “textbooks”.3 2 What is “Radiation”? The “radiation reaction” would seem to be a reaction to “radiation”, but the concept of “radiation” is remarkably poorly defined in the literature. -

Classical Mechanics
Classical Mechanics Hyoungsoon Choi Spring, 2014 Contents 1 Introduction4 1.1 Kinematics and Kinetics . .5 1.2 Kinematics: Watching Wallace and Gromit ............6 1.3 Inertia and Inertial Frame . .8 2 Newton's Laws of Motion 10 2.1 The First Law: The Law of Inertia . 10 2.2 The Second Law: The Equation of Motion . 11 2.3 The Third Law: The Law of Action and Reaction . 12 3 Laws of Conservation 14 3.1 Conservation of Momentum . 14 3.2 Conservation of Angular Momentum . 15 3.3 Conservation of Energy . 17 3.3.1 Kinetic energy . 17 3.3.2 Potential energy . 18 3.3.3 Mechanical energy conservation . 19 4 Solving Equation of Motions 20 4.1 Force-Free Motion . 21 4.2 Constant Force Motion . 22 4.2.1 Constant force motion in one dimension . 22 4.2.2 Constant force motion in two dimensions . 23 4.3 Varying Force Motion . 25 4.3.1 Drag force . 25 4.3.2 Harmonic oscillator . 29 5 Lagrangian Mechanics 30 5.1 Configuration Space . 30 5.2 Lagrangian Equations of Motion . 32 5.3 Generalized Coordinates . 34 5.4 Lagrangian Mechanics . 36 5.5 D'Alembert's Principle . 37 5.6 Conjugate Variables . 39 1 CONTENTS 2 6 Hamiltonian Mechanics 40 6.1 Legendre Transformation: From Lagrangian to Hamiltonian . 40 6.2 Hamilton's Equations . 41 6.3 Configuration Space and Phase Space . 43 6.4 Hamiltonian and Energy . 45 7 Central Force Motion 47 7.1 Conservation Laws in Central Force Field . 47 7.2 The Path Equation . -

The Bouncing Ball Apparatus As an Experimental Tool
1 The Bouncing Ball Apparatus as an Experimental Tool Ananth Kini Aerospace and Mechanical Engineering, University of Arizona Tucson, AZ 85721, USA Thomas L. Vincent Aerospace and Mechanical Engineering, University of Arizona Tucson, AZ 85721, USA Brad Paden Mechanical and Environmental Engineering, University of California, Santa Barbara, CA 93106, USA. Abstract The bouncing ball apparatus exhibits a rich variety of nonlinear dynamical behavior and is one of the simplest mechanical systems to produce chaotic behavior. A computer control system is designed for output calibration, state determination, system identification and control of the bouncing ball apparatus designed by Launch Point Technologies. Two experimental methods are used to determine the co- efficient of restitution of the ball, an extremely sensitive parameter of the apparatus. The first method uses data directly from a stable 1-cycle orbit. The second method is based on the ball map combined with data from a stable 1-cycle orbit. For control purposes, two methods are used to construct linear maps. The first map is determined by collecting data directly from the apparatus. The second map is determined from linearization of the ball map. The maps are used to estimate the domains of attraction to the stable 1-cycle orbit. These domains of attraction are used with a chaotic control algorithm to control the ball to a stable 1-cycle, from any initial state. Results are compared and it is found that the linear map obtained directly from the data gives the more accurate representation of the domain of attraction. 1 Introduction The bouncing ball system consists of a ball bouncing on a plate whose amplitude is fixed and the frequency of vibration is controlled. -
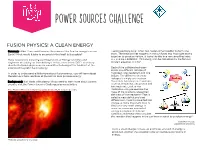
Power Sources Challenge
POWER SOURCES CHALLENGE FUSION PHYSICS! A CLEAN ENERGY Summary: What if we could harness the power of the Sun for energy here on Fusion reactions occur when two nuclei come together to form one Earth? What would it take to accomplish this feat? Is it possible? atom. The reaction that happens in the sun fuses two Hydrogen atoms together to produce Helium. It looks like this in a very simplified way: Many researchers including our Department of Energy scientists and H + H He + ENERGY. This energy can be calculated by the famous engineers are taking on this challenge! In fact, there is one DOE Laboratory Einstein equation, E = mc2. devoted to fusion physics and is committed to being at the forefront of the science of magnetic fusion energy. Each of the colliding hydrogen atoms is a different isotope of In order to understand a little more about fusion energy, you will learn about hydrogen, one deuterium and one the atom and how reactions at the atomic level produce energy. tritium. The difference in these isotopes is simply one neutron. Background: It all starts with plasma! If you need to learn more about plasma Deuterium has one proton and one physics, visit the Power Sources Challenge plasma activities. neutron, tritium has one proton and two neutrons. Look at the The Fusion Reaction that happens in the SUN looks like this: illustration—do you see how the mass of the products is less than the mass of the reactants? That is called a mass deficit and that difference in mass is converted into energy. -
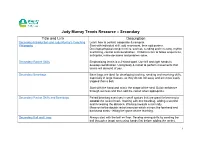
Judy Murray Tennis Resource – Secondary Title and Link Description Secondary Introduction and Judy Murray’S Coaching Learn How to Control, Cooperate & Compete
Judy Murray Tennis Resource – Secondary Title and Link Description Secondary Introduction and Judy Murray’s Coaching Learn how to control, cooperate & compete. Philosophy Start with individual skill, add movement, then add partner. Develops physical competencies, such as, sending and receiving, rhythm and timing, control and coordination. Children learn to follow sequences, anticipate, make decisions and problem solve. Secondary Racket Skills Emphasising tennis is a 2-sided sport. Use left and right hands to develop coordination. Using body & racket to perform movements that tennis will demand of you. Secondary Beanbags Bean bags are ideal for developing tracking, sending and receiving skills, especially in large classes, as they do not roll away and are more easily trapped than a ball. Start with the hand and mimic the shape of the shot. Build confidence through success and then add the racket when appropriate. Secondary Racket Skills and Beanbags Paired beanbag exercises in small spaces that are great for learning to control the racket head. Starting with one beanbag, adding a second and increasing the distance. Working towards a mini rally. Move on to the double racket exercise which mirrors the forehand and backhand shots - letting the game do the teaching. Secondary Ball and Lines Always start with the ball on floor. Develop aiming skills by sending the ball through a target area using hands first before adding the racket. 1 Introduce forehand and backhand. Build up to a progressive floor rally. Move on to individual throwing and catching exercises before introducing paired activity. Start with downward throw emphasising V-shape, partner to catch after one bounce. -

Chapter 5 the Relativistic Point Particle
Chapter 5 The Relativistic Point Particle To formulate the dynamics of a system we can write either the equations of motion, or alternatively, an action. In the case of the relativistic point par- ticle, it is rather easy to write the equations of motion. But the action is so physical and geometrical that it is worth pursuing in its own right. More importantly, while it is difficult to guess the equations of motion for the rela- tivistic string, the action is a natural generalization of the relativistic particle action that we will study in this chapter. We conclude with a discussion of the charged relativistic particle. 5.1 Action for a relativistic point particle How can we find the action S that governs the dynamics of a free relativis- tic particle? To get started we first think about units. The action is the Lagrangian integrated over time, so the units of action are just the units of the Lagrangian multiplied by the units of time. The Lagrangian has units of energy, so the units of action are L2 ML2 [S]=M T = . (5.1.1) T 2 T Recall that the action Snr for a free non-relativistic particle is given by the time integral of the kinetic energy: 1 dx S = mv2(t) dt , v2 ≡ v · v, v = . (5.1.2) nr 2 dt 105 106 CHAPTER 5. THE RELATIVISTIC POINT PARTICLE The equation of motion following by Hamilton’s principle is dv =0. (5.1.3) dt The free particle moves with constant velocity and that is the end of the story. -

Physics 101 Today Chapter 5: Newton's Third
Physics 101 Today Chapter 5: Newton’s Third Law First, let’s clarify notion of a force : Previously defined force as a push or pull. Better to think of force as an interaction between two objects. You can’t push anything without it pushing back on you ! Whenever one object exerts a force on a second object, the second object exerts an equal and opposite force on the first. Newton’s 3 rd Law - often called “action-reaction ” Eg. Leaning against a wall. You push against the wall. The wall is also pushing on you, equally hard – normal/support force. Now place a piece of paper between the wall and hand. Push on it – it doesn’t accelerate must be zero net force. The wall is pushing equally as hard (normal force) on the paper in the opposite direction to your hand, resulting in zero Fnet . This is more evident when hold a balloon against the wall – it is squashed on both sides. Eg. You pull on a cart. It accelerates. The cart pulls back on you (you feel the rope get tighter). Can call your pull the “ action ” and cart’s pull the “ reaction ”. Or, the other way around. • Newton’s 3 rd law means that forces always come in action -reaction pairs . It doesn’t matter which is called the action and which is called the reaction. • Note: Action-reaction pairs never act on the same object Examples of action-reaction force pairs In fact it is the road’s push that makes the car go forward. Same when we walk – push back on floor, floor pushes us forward. -

Discrete Dynamics of a Bouncing Ball
Discrete Dynamics of a Bouncing Ball Gilbert Oppy Dr Anja Slim Monash University Contents 1 Abstract 2 2 Introduction - Motivation for Project 2 3 Mathematical Model 3 3.1 Mathematical Description . .3 3.2 Further Requirements of Model . .4 3.3 Non-Dimensionalization . .4 4 Computational Model 5 5 Experimental Approach 6 5.1 General Use of Model . .6 5.2 Focusing on the α = 0.99 Case . .7 5.3 Phase Plane Analysis . .8 5.4 Analytically Finding 1-Periodic Bouncing Schemes . .9 6 Phase Space Exploration 10 6.1 A 1-Periodic regime in Phase Space . 10 6.2 Other Types of Periodic Bouncing . 11 6.3 Going Backwards in Time . 13 7 Bifurcations Due to Changing the Frequency !∗ 15 7.1 Stability Analysis for 1-Periodic Behaviour . 15 7.2 Bifurcations for the V ∗ = 3 1-Periodic Foci . 16 8 Conclusion 20 9 Acknowledgements 21 1 1 Abstract The main discrete dynamics system that was considered in this project was that of a ball bouncing up and down on a periodically oscillating infinite plate. Upon exploring this one dimensional system with basic dynamical equations describing the ball and plate's vertical motion, it was surprising to see that such a simple problem could be so rich in the data it provided. Looking in particular at when the coefficient of restitution of the system was α = 0.99, a number of patterns and interesting phenomena were observed when the ball was dropped from different positions and/or the frequency of the plate was cycled through. Matlab code was developed to first create the scenario and later record time/duration/phase of bounces for very large number of trials; these programs generated a huge array of very interesting results. -

HW 6, Question 1: Forces in a Rotating Frame
HW 6, Question 1: Forces in a Rotating Frame Consider a solid platform, like a \merry-go round", that rotates with respect to an inertial frame of reference. It is oriented in the xy plane such that the axis of rotation is in the z-direction, i.e. ! = !z^, which we can take to point out of the page. Now, let us also consider a person walking on the rotating platform, such that this person is walking radially outward on the platform with respect to their (non-inertial) reference frame with velocity v = vr^. In what follows for Question 1, directions in the non-inertial reference frame (i.e. the frame of the walking person) are defined in the following manner: the x0-direction points directly outward from the center of the merry-go round; the y0 points in the tangential direction of rotation in the plane of the platform; and the z0-direction points out of the page, and in the same direction as the z-direction for the inertial reference frame. (a) Identify all forces. Since the person's reference frame is non-inertial, we need to account for the various fictitious forces given the description above, as well as any other external/reaction forces. The angular rate of rotation is constant, and so the Euler force Feul = m(!_ × r) = ~0. The significant forces acting on the person are: 0 • the force due to gravity, Fg = mg = mg(−z^ ), 2 0 • the (fictitious) centrifugal force, Fcen = m! × (! × r) = m! rx^ , 0 • the (fictitious) Coriolis force, Fcor = 2mv × ! = 2m!v(−y^ ), • the normal force the person experiences from the rotating platform N = Nz^0, and • a friction force acting on the person, f, in the x0y0 plane. -

Chapter 5 ANGULAR MOMENTUM and ROTATIONS
Chapter 5 ANGULAR MOMENTUM AND ROTATIONS In classical mechanics the total angular momentum L~ of an isolated system about any …xed point is conserved. The existence of a conserved vector L~ associated with such a system is itself a consequence of the fact that the associated Hamiltonian (or Lagrangian) is invariant under rotations, i.e., if the coordinates and momenta of the entire system are rotated “rigidly” about some point, the energy of the system is unchanged and, more importantly, is the same function of the dynamical variables as it was before the rotation. Such a circumstance would not apply, e.g., to a system lying in an externally imposed gravitational …eld pointing in some speci…c direction. Thus, the invariance of an isolated system under rotations ultimately arises from the fact that, in the absence of external …elds of this sort, space is isotropic; it behaves the same way in all directions. Not surprisingly, therefore, in quantum mechanics the individual Cartesian com- ponents Li of the total angular momentum operator L~ of an isolated system are also constants of the motion. The di¤erent components of L~ are not, however, compatible quantum observables. Indeed, as we will see the operators representing the components of angular momentum along di¤erent directions do not generally commute with one an- other. Thus, the vector operator L~ is not, strictly speaking, an observable, since it does not have a complete basis of eigenstates (which would have to be simultaneous eigenstates of all of its non-commuting components). This lack of commutivity often seems, at …rst encounter, as somewhat of a nuisance but, in fact, it intimately re‡ects the underlying structure of the three dimensional space in which we are immersed, and has its source in the fact that rotations in three dimensions about di¤erent axes do not commute with one another. -

Bouncing Balls Summer of Innovation Zero Robotics Bouncing Balls Instructor’S Handout
Physics: Bouncing Balls Summer of Innovation Zero Robotics Bouncing Balls Instructor's Handout 1 Objective This activity will help students understand some concepts in force, acceleration, and speed/velocity. 2 Materials At least one bouncy ball, such as a superball or a tennis ball. If you want, you can bring more balls for the students to bounce themselves, but that's not critical. 3 Height Bounce a superball many times in the front of the classroom. Ask the students to call out observations about the ball and its bouncing. Things to observe include: • The ball's starting acceleration and speed are 0; • The ball's acceleration and speed increase until the ball hits the ground and bounces; • After the bounce, the ball returns to a maximum height that is less than the original height of the ball Questions to ask: • What forces are acting on the ball? (Answer: gravity. friction, the normal force) • Where does the ball reach its maximum speed and acceleration? (Answer: right before it hits the ground) • What is the acceleration of the ball when it is at its peak heights? (Answer: Zero...it's about to change direction 4 Applications 4.1 Tall Tower What happens when you drop a bouncy ball off of a gigantic building, such as the Sears Tower in Chicago (440 m), or the new tallest building in the world, the Burj Khalifa in Dubai (500 m)? Well, some Australian scientists dropped a bouncy ball off of a tall radio tower. The ball actually shattered like glass on impact. 4.2 Sports What sports require knowledge of bouncing balls for their success? (Tennis, cricket, racquetball, baseball, and basketball are a few).