Memòria I Annexos
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Das Grandiose Saisonfinaleby Art Motor
Das grandiose Saisonfinale by Art Motor XIX BBiikkeetobeerrffeesstt 19-22. September 2019 Arena Oschersleben ProThunder AllStars TT SuperclassiX International Sidecar Trophy IG Königsklasse Foto: Doreen Müller-Uhlig 4h classic Endurance Egertaler Blaskapelle Intro Pro Thunder AllStars Pro Thunder AllStars einand... Bei den SuperTwins by Art Motor starten Motorräder mit fahrt - Pro Thunder Open by Art Motor ist eine Rennserie für großvo - Pro Thunde r by Art Motor ist die Klasse für seriennahe Servus mit ...beim 19. German windgekühlten Zweizylinder-Viertaktmotoren mit zwei Ventilen lumige Twins und Vierzylinder aus italienischer Produk - Viertaktmotorräderbis 1000 ccm mit weniger als vier Zy - BIKEtoberfest by Art Motor! So vielen netten Menschen pro Zylinder. Die Gemischaufbereitung ist freigestellt. tion auf Basis von Serienmotorrädern. Bridgestone-Rei - lindern auf Basis straßenzulassungsfähiger Motorräder. Exakt und Petrolheads wie heuer haben wir das bisher selten sagen dürfen. fenbindung sorgt für Chancengleichheit. definierte Leistungsgewicht-Fenster und Bridgestone-Reifenbin - Denn das BIKEtoberfest hat sich zu einem kultigen Stelldichein gemau - Am Start in der SuperTwins dung sorgen für Seriennähe und Chancengleichheit. sert, bei dem alle, wirklich alle , in der Motorsport Arena Oschersleben MOTOmania Racing Team Am Start in der Pro Thunder Open zusammenkommen, um noch mal nach Herzenlust aufzuzünden. 203 Holger Aue GER MOTOmania-Guzzi Indian Racing Team by Geigercars Am Start in der Pro Thunder Ducati1.de 55 Thomas Pfromm GER -

2015 FIM Motogp™ 世界選手権シリーズ第15戦
2015 FIM MotoGPTM 世界選手権シリーズ第 15 戦 MOTUL 日本グランプリ 2015年10月9日〜11日 MEDIA INFORMATION 2015.6.5 はじめに ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・1P 開催要項・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 2P MotoGP とは・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 3P 今シーズンの見どころ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・4P 日本グランプリの見どころ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・6P スペシャルトピックス・ ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 7P イベントトピックス・ ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 12P MotoGP 特別観戦キャンペーン・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ 16P グランプリロード R123 パレード・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・17P 2015 年 MotoGP 日本グランプリ プレイベント・・・・・・・・・・・・・・・・・・・・ ・18P 観戦エリア・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・19P 基 本 チ ケット・駐 車 券 のご 案 内 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・20P スペシャル チ ケット・駐 車 券 のご 案 内 ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・21P キャンププラン・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・24P オプションチケットのご案内・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・25P オフィシャル 観 戦 バスツアーのご案内・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・27P 交 通 ガイド・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・28P 推奨ルート・ ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・29P 迂回路のご案内・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・30P 場内駐車場マップ・ ・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・31P 歴 代リザルト・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・ ・32P 歴代動員・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・・34P はじめに 平素は、私共の事業に多大なるご支援、ご協力を賜り、誠にありがとうございます。 今年も、「2015FIM・ MotoGPTM 世 界 選 -

Swedish TT 2017 ARC ASN 67-10, EMN 70/2
Swedish TT 2017 ARC ASN 67-10, EMN 70/2 9+12 22 - 23 July 2017 Result of Warmup Anderstorp - 4025 mtr. Class = 9 Motorcycle Pos Nbr Name / Entrant CITY / Club Laps Fastest In Gap 2nd time 1 11 William Svärd (SWE) Honda NSF 4 1:45.833 4 1:45.838 Hällekis Göteme MK 2 2 Stefan Sand (SWE) JGS KTM 560 KTM 4 1:48.182 4 2.349 1:49.518 Bromma Västra MK 3 25 Johanna Innerfors (SWE) Honda NSF250R 5 1:49.393 4 3.560 1:51.073 Mariefred Strängnäs AMS 4 46 Dennis Älvenstrand (SWE) KTM DUKE 690 R 5 1:50.911 4 5.078 1:52.888 Tumba Linköpings MS 5 15 Lars Lindman (SWE) Honda NSF 250R 5 1:52.191 3 6.358 1:52.412 Stockholm MCHK-Racing 6 24 Mikael Andersson (SWE) Micke SM 5 1:52.611 4 6.778 1:54.914 Gävle MCHK-Racing 7 32 Jan Werner (SWE) KTM duke R 2 1:52.980 2 7.147 3:50.685 Torslanda Kortedala MK 8 35 Mathias Westergård (SWE) MR/02 5 1:53.661 5 7.828 1:55.978 Köping Linköpings MS 9 65 Tommy Ekström (SWE) Husqvarna 701 6 1:55.484 4 9.651 1:55.711 Sala Teknis MC 10 64 Ulrik Smedberg (SWE) KTM 690 Duke R 5 1:55.751 4 9.918 1:56.316 Västra Frölunda Ducatiklubben 11 67 Egon Karlsson (SWE) KTM Duke690C up 5 1:55.813 5 9.980 1:56.050 Storebro Linköpings MS 12 96 Fredrik Brunell (SWE) KTM 690 SMC R 5 1:55.920 4 10.087 1:56.598 Hovås Ducatiklubben 13 63 Peter Mikael Jadesjö (SWE) KTM 690 Duke 5 1:57.712 4 11.879 1:57.925 Mölnlycke Ducatiklubben 14 98 Mikael Johansson (SWE) 5 2:02.906 3 17.073 2:02.981 Göteborg Kortedala MK 15 34 Mats Andersson (SWE) 5 2:05.882 3 20.049 2:06.774 Kungsbacka Ducatiklubben Fastest time : 1:45.833 in lap 4 by nbr. -
Offical Result
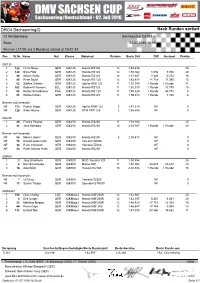
DRC4 Sachsenring/D Nach Runden sortiert IG Königsklasse Sachsenring 3,670 km Race 02.07.2016 15:49 Rennen (17:00 und 2 Runden) started at 16:01:34 Pos. St.Nr. Name Nat Klasse Motorrad Runden Beste Zeit. Diff. Abstand Punkte IGK125 1 122 Chris Meyer GER IGK125 Honda RS125 12 1:52.695 25 2 120 Boris Pütz GER IGK125 Honda RS125 12 1:50.942 3.056 3.056 20 3 98 Adrian Hähle GER IGK125 Honda RS125 12 1:51.657 3.328 0.272 16 4 85 Peter Sydel GER IGK125 Honda RS 125 12 1:52.874 14.718 11.390 13 5 82 Steffen Grämer GER IGK125 Aprilia RSR 125 11 1:55.540 1 Runde 1 Runde 11 6 102 Robrecht Roosen BEL IGK125 Honda RS125 11 1:55.570 1 Runde 10.199 10 7 88 Reiner Scheidhauer FRA IGK125 Honda RS 125 11 1:58.325 1 Runde 40.778 9 8 91 Winkler Micky GER IGK125 Honda RS125 11 1:59.013 1 Runde 3.330 8 Rennen nicht beendet NF 113 Patrick Unger GER IGK125 Aprilia RSW 125 5 1:47.319 NF 0 NF 125 Sirko Wache GER IGK125 KTM FRR 125 2 1:58.898 NF 0 IGK250 1 35 Franko Piesner GER IGK250 Honda RS250 11 1:53.194 25 2 41 Jens Bebiolka GER IGK250 Honda RS250 10 2:03.367 1 Runde 1 Runde 20 Rennen nicht beendet NF 58 Mario Lindner GER IGK250 Honda RS250 8 2:04.613 NF 0 NF 78 David Laudermilch GER IGK250 Yamaha TZ250 NF 0 NF 32 Peter Christiani GER IGK250 Yamaha TZ250 NF 0 NF 34 Peter Schulte Wien GER IGK250 Honda RS250 NF 0 IGK500 1 3 Jörg Schölhorn GER IGK500 ROC Yamaha YZR500 V4 11 1:50.854 25 2 6 Ron Schönfelder GER IGK500 Ronax 500 11 1:54.082 20.672 20.672 20 3 16 Ajax Kühn GER IGK500 Suzuki RG 500 10 2:02.884 1 Runde 1 Runde 16 Rennen nicht beendet NF 7 Uli Dietz GER IGK500 Yamaha TZ360 NF 0 NF 13 Stefan Täuber GER IGK500 Spondon-STR500 NF 0 IGKMoto3 1 152 Oliver König CZE IGKMoto3 Honda NSF250R 12 1:42.987 25 2 4 Dirk Geiger GER IGKMoto3 Honda NSF250R 12 1:44.397 5.381 5.381 20 3 21 Matthias Meggle GER IGKMoto3 Honda NSF250R 12 1:46.829 17.715 12.334 16 4 44 Kevin Orgis GER IGKMoto3 Honda NSF 250 12 1:46.687 17.784 0.069 13 5 131 Erhard Toni GER IGKMoto3 Honda NSF250R 12 1:47.339 37.466 19.682 11 Vorsprung DurchschnittsgeschwindigkeitBeste Rundenzeit Beste Geschw. -

2021 NJMP Final Race Results.Xlsx
Class Finish Name Vehicle Hometown RR 2-Strk Classic 250 GP 1 Sakis Vasilopoulos Yamaha TZ 250 G West Palm Beach RR 2-Strk Classic 350 GP 1 Michael Perry 1980 Yamaha TZ 350 Jupiter RR 200 Grand Prix + 1 Christopher Akaydin 1970 Honda SL175 Louisville 2 Camillo Sassano 1971 Honda CB175 Durham 3 Keith Hamilton 1971 Honda CB175 Chalfont 4 Mitchell Barnes Honda CB 160 Louisville 5 Steve Massey 1971 Yamaha CS3 Appleton 6 Bill Doran 1968 Yamaha YCS1 Athens 7 Tony Read 1968 BSA B25 Charlotte 8 Tim Terrell 1966 Honda CB160 Burlington 9 Charles Miller 1972 Honda CB175 Flint 10 F Danny Habermel 1970 Honda CL 175 Salem 11 John Mccarty 1965 Honda CB 160 Chalfont 12 Stuart Sanders 1972 Honda CL175 Nashville 13 Michael Shumaker 1968 Honda CL175 University Heights 14 Lex Robb 1968 Honda CL175 PottstoWn 15 Larry Poons 1969 Honda CB 175 East Durham 16 Cindy McLean 1971 Honda CL175 Jacksonville Beach 17 Chris MarloWe 1965 Honda CB160 Ambler 18 Scott Lehr Honda CL175 sloper Millersville 19 James Richardson 1966 Honda CB160 SteWartstoWn RR 250 Grand Prix 1 David Roper 1967 Harley-Davidson CRTT Hicksville 2 Christopher Akaydin 1970 Honda SL175 Louisville 3 John Stephens 1970 Ducati 250 Stockholm 4 Robin Scudder 1968 Ducati MK3 Pikeville 5 Robert Brangaccio 1971 Ducati Basking Ridge 6 Andy Findling RR 350 GP 1 Jim JoWers Seeley 7R East Hampron 2 John Stephens 1970 Ducati 250 Stockholm 3 Helmut Niederer AJS 7R Nashville 4 David Roper 1970 Harley-Davidson ERTT Hicksville 5 Alex McLean 1967 Harley-Davidson Aermacchi Drixton Jacksonville Beach 6 Andy Findling 1968 BSA Kalamazoo RR 500 Premier Vint. -
Sorted on Best Lap Time Brand
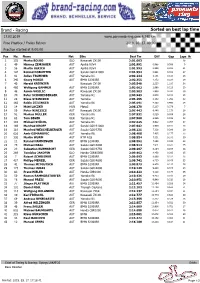
Brand - Racing Sorted on best lap time 17.03.2019 www.pannonia-ring.com 4,740 km Free Practice / Freies Fahren 2019. 03. 17. 09:00 Practice started at 9:00:00 Pos No. Name Nat Bike Best Tm Diff Gap LapsBike 1 155 Marko BOLKO SLO Kawasaki ZX10R 2:01.003 28 2 49 Hannes ZEMSAUER AUT Aprilia RSV4 2:01.991 0.988 0.988 9 3 56 Martin ULRICH AUT Aprilia RSV4 2:01.993 0.990 0.002 21 4 147 Roland DOBLEITER AUT Suzuki GSX-R1000 2:01.994 0.991 0.001 27 5 91 Julian TRUMMER AUT Yamaha R1 2:02.134 1.131 0.140 23 6 340 Georg MOSER AUT BMW S1000RR 2:02.355 1.352 0.221 29 7 40 Harald KRIENZER Kawasaki ZX10R 2:03.540 2.537 1.185 34 8 460 Wolfgang GAMMER AUT BMW S1000RR 2:03.663 2.660 0.123 19 9 48 Asmin VASILIC AUT Kawasaki ZX10R 2:03.903 2.900 0.240 30 10 70 Peter SCHOBESBERGER AUT Yamaha R1 2:03.943 2.940 0.040 15 11 28 Klaus STEINEDER AUT Yamaha 2:05.195 4.192 1.252 32 12 166 Robin ZEILINGER AUT Yamaha R6 2:05.691 4.688 0.496 34 13 14 Máté LACZKÓ HUN Moto3 2:06.270 5.267 0.579 7 14 59 Peter NINCSICS AUT Kawasaki ZX10R 2:07.443 6.440 1.173 29 15 92 Markus MÜLLER GER Yamaha R6 2:07.532 6.529 0.089 24 16 85 Tom BEGER GER Yamaha R1 2:07.568 6.565 0.036 12 17 110 Michael STÖCHL AUT Yamaha R1 2:07.625 6.622 0.057 47 18 169 Manfred KROPF AUT Suzuki GSX-R1000 2:07.942 6.939 0.317 13 19 183 Manfred WESCHELBERGER AUT Suzuki GSX-R750 2:08.231 7.228 0.289 20 20 626 Amir OSMANOVIC AUT Yamaha R6 2:08.408 7.405 0.177 33 21 300 Martin WURM AUT KTM RC8 2:08.554 7.551 0.146 30 22 11 Roland HAMMINGER AUT BMW S1000RR 2:08.892 7.889 0.338 24 23 75 Michael NAGL AUT Suzuki -

Nordic Championship 2019
Nordic Championship 2019 Anderstorp (dansk Botniaring Våler Karlskoga Class 1: pre-47 runde) Total 1 2 1 2 1 2 1 2 1 Jaro Alto Triumph FIN DNF 20 25 25 25 20 16 DNS 131 2 Peter Forsling Triumph T100 SWE 20 20 20 25 20 20 125 3 Børje Ivarsson BSA SWE 25 25 25 25 100 4 Edvin Moen BSA 500 NOR 13 13 13 13 52 5 John Puhakka Norton FIN 20 16 36 6 Tor Halvorsen Jawa Perak 350 NOR 16 16 32 7 Hannu Kaunismäki Norton FIN 16 13 29 8 Pekka Kortelainen BSA 496 FIN 11 11 22 9 Tobias Lindqvist Monark SWE DNF 16 16 10 Jari kaipola Triumph FIN 13 DNF 13 11 Patrik Mark Norbin 500 SWE DNF DNS DNF 11 11 Michael Djupsjøback Norton SWE DNS DNS Micke Andersson BSA SWE DNS DNS Charles Ingberg Triumph SWE DNF DNS Nordic Championship 2019 Anderstorp (dansk Botniaring Våler Karlskoga Class 2: 175 cc runde) Total 1 2 1 2 1 2 1 2 1 Magnus Wihlborg SR 175 SWE 25 25 25 25 20 DNS 120 2 Nils Eriksson Maico 125 SWE 16 16 16 16 11 16 91 3 Hari Konttinen Honda 175 SWE 20 20 16 20 76 4 Klas Eriksson Maico SWE 25 25 50 5 Erkki Männistö Minsk SWE 25 25 50 6 Tanja Hentschel Aermacchi GER 20 20 40 7 Rikhard Nordman Bridgestone FIN 20 20 40 8 Timo Haapoja Bridgestone FIN 16 16 32 9 Ville Männistö Minsk SWE 13 DNS 13 10 Tommy Köhl Husqvarna SWE 13 13 Per Bynander Maico 125 SWE DNS DNS DNS Nordic Championship 2019 Anderstorp (dansk Botniaring Våler Karlskoga Class 2B: 50 cc Water cooled runde) Total 1 2 1 2 1 2 1 2 1 Joergen Kvist Kreidler Van Veen R DEN 25 25 25 25 13 25 138 2 Magnus Zwicky Burkal Simson 50 DEN 16 20 20 16 72 3 Jon Nordstrøm Minarelli SWE 25 25 50 4 Juha Salonen -

2021 AHRMA Results
AHRMA Bridgestone Tires National Historic Cup Roadrace Series Roebling Road Raceway - Feb 20-21 2021 Saturday Results - February 20, 2021 Class Finish Name Vehicle Hometown Nat/State RR 2-Strk Classic 350 GP 1 Michael Perry 1980 Yamaha TZ 350 Jupiter FL RR 200 Grand Prix + 1 Rob Hall 1965 Honda CB160 Charlotte NC 2 John Scales 1971 Honda CL160 Murphy NC 3 Lorraine Crussell 1967 Honda CB160 Pleasanton CA 4 Christopher Akaydin 1970 Honda SL175 Louisville KY 5 Colton Roberts 1969 Yamaha CT175 Pawnee IL 6 Stuart Sanders 1972 Honda CL175 Nashville TN RR 250 Grand Prix 1 David Roper 1967 Harley-Davidson CRTT Hicksville NY 2 John Scales 1971 Honda CL160 Murphy NC 3 Don Hollingsworth 1968 Harley-Davidson Sprint St. Augustine FL 4 Robert Brangaccio 1971 Ducati Basking Ridge NJ 5 John Kern 1968 Ducati 250 Desmo Tryon NC RR 350 GP 1 Alex McLean 1967 Harley-Davidson Aermacchi Drixton Jacksonville Beach FL 2 Jerry Duke 1967 Ducati 350 Scrambler Florence AL 3 Colton Roberts 1967 Triumph T100 Pawnee IL 4 David Roper 1967 Harley-Davidson CRTT Hicksville NY 5 Doug Bowie 1967 Ducati 350 Scrambler Lilburn Ga 6 Tsutomu Okada Yamaha DT1 Gardena CA RR 500 Premier Vint. Cup 1 Tony Read 1971 BSA B50 Charlotte TN 2 Wes Orloff 1967 Honda 450 Mukwonago WI 3 Brian Larrabure 1968 Seeley G50 Calabasas CA 4 Jamie Waters 1961 Matchless McIntyre G50 Brewster NY 5 Jerry Duke 1967 Ducati 350 Scrambler Florence AL 6 Andy Findling 1961 BSA Gold Star Kalamazoo MI RR BEARS 1 Stan Keyes 1972 Norton Commando 750 Jacksonville FL RR BOT 1 900cc-Open 1 Brian Larrabure 2010 Pierobon -

En El Mundial De Motociclismo 1ª PARTE HISTORIA DE HONDA EN EL MUNDIAL DE MOTOCICLISMO
Historia de Honda en el Mundial de Motociclismo 1ª PARTE HISTORIA DE HONDA EN EL MUNDIAL DE MOTOCICLISMO 1ª PARTE Historia de Honda en el Mundial de Motociclismo n dos entregas vamos a recorrer un Hoy Honda es la primera potencia apasionante viaje por la historia de del Mundial de MotoGP con Marc Honda en el Mundial de Motociclismo. Márquez al mando… Aunque en este ELa primera hasta finales de los años 60, libro no hablaremos del resto de las y la segunda desde su vuelta al Mundial especialidades deportivas, también en los 80 hasta la actualidad. El gigante hay que destacar que es “la invencible” japonés sólo ha ido a las pruebas del en el Mundial de Trial con Toni Bou, ya Mundial con el único objetivo de luchar ha recuperado la victoria en el Rally por la victoria y cuando no ha podido Dakar y tiene en el punto de vista ser así, simplemente se ha retirado como destronar a Kawasaki del Mundial SBK sucedió a finales de los años 60. con Alvaro Bautista. Texto y fotos proporcionados por Honda España HISTORIA DE HONDA EN EL MUNDIAL DE MOTOCICLISMO Equipo Honda 1959 a llegada de Honda al Mundial fue fruto de un concienzudo trabajo de preparación. Antes de acudir a SOICHIRO HONDA TRAS Llos Grandes Premios, Soichiro Honda, fundador de la empresa y alma mater VISITAR EL TOURIST de la corporación, sometió sus ideas TROPHY EN 1954 SE DIÓ a una profunda reflexión. Después de visitar el Tourist Trophy en 1954 CUENTA QUE TENÍA QUE para conocer el nivel de los demás RENOVAR SU TECNOLOGÍA fabricantes presentes en el campeonato, comprendió que necesitaba renovar conceptualmente su tecnología. -
2013 Grand Prix Motorcycle Racing Season.Pdf Uploaded by Dzimmer6
15 views 0 0 RELATED TITLES 2013 Grand Prix motorcycle racing season.pdf Uploaded by dzimmer6 Wikipedia article Full description Cat 2009 Ditest #Junkie BBC Top Gear - 22 April 2018 UK Save Embed Share Print 2013 Grand Prix motorcycle racing season 2013 Grand Prix motorcycle racing season 2013 F.I.M. Grand Prix motorcycle racing season PPrreevviioouuss:: 22001122 NNeexxtt:: 22001144 The 2013 Grand Prix motorcycle racing season was the 65th F€d€ration Internationale de Motocyclisme Road racing World Championship season. Jorge Lorenzo started the season as the defending World Champion, while Honda was the defending Manufacturers' Champion. Moto2 champion Marc M•rquez joined the MotoGP grid with Repsol Honda and Moto3 champion Sandro Cortese entered Moto2, with Intact GP. The three championships were each won by Spanish riders, with M•rquez winning in MotoGP, Pol Espargar‚ winning in Moto2, and Maverick Viƒales winning in Moto3. Spanish riders dominated the season overall, with 47 of the 52 races across all classes won by a Spanish rider. Of the five non-Spanish victories, three came from Moto2 championship runner-up Scott Redding, and one each from Moto2 front-runner Mika Kallio € € his first in the class, in the Czech Republic € € and MotoGP rider Valentino Rossi, who took his first premier class victory since 2010 at the Dutch TT. Season summary MotoGP In the premier MotoGP class, Lorenzo, along with Repsol Honda teamam-mates Marc M•rquez and Dani Pedrosa battled it out for most of the season in regards to the championship battle. Lorenzo won the ope ning race of the season in Qatar, before rookie M•rquez became the youngest premier class winner, as he claimed victory in the inaugural Grand Prix of the Americas in Texas. -

Trophee De La
TROPHEE 11EME DE LA VITESSE CIRCUIT ANNEAU DU RHIN Entrée : 10 € 1 8 E T 1 9 JUIN 2016 INFORMATIONS ET RESERVATIONS www.passionvitesse.com TO CLUB MO Le mot du Président Bonjour à tous, Toute l’équipe du Moto Club Passion Vitesse est heureuse de vous accueillir pour la 1ère manche de la 11ème édition du Trophée de la Vitesse de l’Anneau du Rhin 2016. La course de Juin est un bon test d’entre saison pour tous les pilotes qui participent à un Championnat et ils sont nombreux. C’est donc avec beaucoup de rigueur que nos compétiteurs s’y préparent. Leur volonté de réussir sur leur circuit régional est une préoccupation bien présente. Le trophée est aussi une fête de la moto où tous les passionnés se rencontrent. Merci à tous les pilotes de nous faire vivre en direct de grandes émotions et même quelque fois des frissons. C’est toujours aussi captivant et impressionnant de les voir en découdre. Merci à tous nos bénévoles pour leur aide au combien nécessaire. Grand merci à nos partenaires, pensez à eux lors de vos prochains achats. Je vous remercie d’être venu applaudir nos pilotes lors de ce 11ème Trophée de la Vitesse et vous recommande de respecter les consignes de sécurité. SPORTIVEMENT Thierry Selig PS : Ta ville, n’est pas un circuit ! 1 the e c n e l l e c x fit e e the c n e du CIRCUIT DE L’ANNEAU DE RHIN e Trophée de la vitess l l e c x fit e Partenaire officiel Trophée de la vitesse du CIRCUIT DE L’ANNEAU DE RHIN Une gamm e complète pour ous! tous vos Rejoignez-n besoins ! even-oil www.seven-oil.com sur la page S ous! Rejoig n ez-n Seven-oil www.seven-oil.com sur la page TO CLUB MO Programme / Horaire motos Samedi 18 juin 2016 1ère manche - SAISON 2016 MATIN PROGRAMME HORAIRE ENTRAINEMENT - ESSAI LIBRE - QUALIF. -

FIM WOMEN in MOTORCYCLING COMMISSION Newsletter ISSUE 2, 2013
FIM WOMEN IN MOTORCYCLING COMMISSION Newsletter ISSUE 2, 2013 Editorial - Kick start for women’s Road Racing The FIM and its Women in Motorcycling We hope that our project will create more Commission (CFM) have worked hard to improve women like her. But Ana is not the only example. the presence of women in every discipline. For Finnish rider Taru Rinne was the first woman to now, there are high-level women´s classes in gain world championship points, she also Motocross, Enduro and Trial. But we also have qualified second in 125 cc class in 1989 at good news regarding Road Racing! Since the last Hockenheim and finished seventh at the race. meeting of the Commission in Geneva in The German rider Katja Poensgen gained points February, we have targeted as one of our top in the early 2000’s. Gina Bovaird from America priorities to develop the presence of women in competed in a 500 cc race in France in 1982 and this great discipline as well. Elena Rosell from Valencia competed last year in Now I am pleased to tell you that the FIM, with the Moto2-class. So there is the potential – we just need to create better opportunities! the support of the RFME (Real Federacion Motociclista Española), will organise a women´s We will keep you posted regarding this great Road Racing camp at Albacete circuit in Spain project but for now you can get more information this June! This training camp is a kick-start to about the training camp by sending us an email at: promote and develop the presence of women in [email protected] Road Racing.