Performance Scalability of Multimedia Instruction Set Extensions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Distributed Algorithms with Theoretic Scalability Analysis of Radial and Looped Load flows for Power Distribution Systems
Electric Power Systems Research 65 (2003) 169Á/177 www.elsevier.com/locate/epsr Distributed algorithms with theoretic scalability analysis of radial and looped load flows for power distribution systems Fangxing Li *, Robert P. Broadwater ECE Department Virginia Tech, Blacksburg, VA 24060, USA Received 15 April 2002; received in revised form 14 December 2002; accepted 16 December 2002 Abstract This paper presents distributed algorithms for both radial and looped load flows for unbalanced, multi-phase power distribution systems. The distributed algorithms are developed from tree-based sequential algorithms. Formulas of scalability for the distributed algorithms are presented. It is shown that computation time dominates communication time in the distributed computing model. This provides benefits to real-time load flow calculations, network reconfigurations, and optimization studies that rely on load flow calculations. Also, test results match the predictions of derived formulas. This shows the formulas can be used to predict the computation time when additional processors are involved. # 2003 Elsevier Science B.V. All rights reserved. Keywords: Distributed computing; Scalability analysis; Radial load flow; Looped load flow; Power distribution systems 1. Introduction Also, the method presented in Ref. [10] was tested in radial distribution systems with no more than 528 buses. Parallel and distributed computing has been applied More recent works [11Á/14] presented distributed to many scientific and engineering computations such as implementations for power flows or power flow based weather forecasting and nuclear simulations [1,2]. It also algorithms like optimizations and contingency analysis. has been applied to power system analysis calculations These works also targeted power transmission systems. [3Á/14]. -

Data-Flow Prescheduling for Large Instruction Windows in Out-Of-Order Processors
Data-Flow Prescheduling for Large Instruction Windows in Out-of-Order Processors Pierre Michaud, Andr´e Seznec IRISA/INRIA Campus de Beaulieu, 35042 Rennes Cedex, France {pmichaud, seznec}@irisa.fr Abstract We introduce data-flow prescheduling. Instructions are sent to the issue buffer in a predicted data-flow order instead The performance of out-of-order processors increases of the sequential order, allowing a smaller issue buffer. The with the instruction window size. In conventional proces- rationale of this proposal is to avoid using entries in the is- sors, the effective instruction window cannot be larger than sue buffer for instructions which operands are known to be the issue buffer. Determining which instructions from the yet unavailable. issue buffer can be launched to the execution units is a time- In our proposal, this reordering of instructions is accom- critical operation which complexity increases with the issue plished through an array of schedule lines. Each schedule buffer size. We propose to relieve the issue stage by reorder- line corresponds to a different depth in the data-flow graph. ing instructions before they enter the issue buffer. This study The depth of each instruction in the data-flow graph is de- introduces the general principle of data-flow prescheduling. termined, and the instruction is inserted in the correspond- Then we describe a possible implementation. Our prelim- ing schedule line. Lines are consumed by the issue buffer inary results show that data-flow prescheduling makes it sequentially. possible to enlarge the effective instruction window while Section 2 briefly describes issue buffers and discusses re- keeping the issue buffer small. -

Scalability and Performance Management of Internet Applications in the Cloud
Hasso-Plattner-Institut University of Potsdam Internet Technology and Systems Group Scalability and Performance Management of Internet Applications in the Cloud A thesis submitted for the degree of "Doktors der Ingenieurwissenschaften" (Dr.-Ing.) in IT Systems Engineering Faculty of Mathematics and Natural Sciences University of Potsdam By: Wesam Dawoud Supervisor: Prof. Dr. Christoph Meinel Potsdam, Germany, March 2013 This work is licensed under a Creative Commons License: Attribution – Noncommercial – No Derivative Works 3.0 Germany To view a copy of this license visit http://creativecommons.org/licenses/by-nc-nd/3.0/de/ Published online at the Institutional Repository of the University of Potsdam: URL http://opus.kobv.de/ubp/volltexte/2013/6818/ URN urn:nbn:de:kobv:517-opus-68187 http://nbn-resolving.de/urn:nbn:de:kobv:517-opus-68187 To my lovely parents To my lovely wife Safaa To my lovely kids Shatha and Yazan Acknowledgements At Hasso Plattner Institute (HPI), I had the opportunity to meet many wonderful people. It is my pleasure to thank those who sup- ported me to make this thesis possible. First and foremost, I would like to thank my Ph.D. supervisor, Prof. Dr. Christoph Meinel, for his continues support. In spite of his tight schedule, he always found the time to discuss, guide, and motivate my research ideas. The thanks are extended to Dr. Karin-Irene Eiermann for assisting me even before moving to Germany. I am also grateful for Michaela Schmitz. She managed everything well to make everyones life easier. I owe a thanks to Dr. Nemeth Sharon for helping me to improve my English writing skills. -

Jetson TX2 • NVIDIA Jetson Xavier • GPU Programming • Algorithm Mapping: • Convolutions Parallel Algorithm Execution
GPU and multicore CPU architectures. Algorithm mapping Contributors: N. Tsapanos, I. Karakostas, I. Pitas Aristotle University of Thessaloniki, Greece Presenter: Prof. Ioannis Pitas Aristotle University of Thessaloniki [email protected] www.multidrone.eu Presentation version 1.3 GPU and multicore CPU architectures. Algorithm mapping • GPU and multicore CPU processing boards • Graphics cards • NVIDIA Jetson TX2 • NVIDIA Jetson Xavier • GPU programming • Algorithm mapping: • Convolutions Parallel algorithm execution • Graphics computing: • Highly parallelizable • Linear algebra parallelization: • Vector inner products: 푐 = 풙푇풚. • Matrix-vector multiplications 풚 = 푨풙. • Matrix multiplications: 푪 = 푨푩. Parallel algorithm execution • Convolution: 풚 = 푨풙 • CNN architectures, linear systems, signal filtering. • Correlation: 풚 = 푨풙 • template matching, tracking. • Signal transforms (DFT, DCT, Haar, etc): • Matrix vector product form: 푿 = 푾풙 • 2D transforms (matrix product form): 푿’ = 푾푿. Processing Units • Multicore (CPU): • MIMD. • Focused on latency. • Best single thread performance. • Manycore (GPU): • SIMD. • Focused on throughput. • Best for embarrassingly parallel tasks. Pascal microarchitecture https://devblogs.nvidia.com/inside-pascal/gp100_block_diagram-2/ Pascal microarchitecture https://devblogs.nvidia.com/inside-pascal/gp100_sm_diagram/ GeForce GTX 1080 • Microarchitecture: Pascal. • DRAM: 8 GB GDDR5X at 10000 MHz. • SMs: 20. • Memory bandwidth: 320 GB/s. • CUDA cores: 2560. • L2 Cache: 2048 KB. • Clock (base/boost): 1607/1733 MHz. • L1 Cache: 48 KB per SM. • GFLOPs: 8873. • Shared memory: 96 KB per SM. GPU and multicore CPU architectures. Algorithm mapping • GPU and multicore CPU processing boards • Graphics cards • NVIDIA Jetson TX2 • NVIDIA Jetson Xavier • GPU programming • Algorithm mapping: • Convolutions ARM Cortex-A57: High-End ARMv8 CPU • ARMv8 architecture • Architecture evolution that extends ARM’s applicability to all markets. • Full ARM 32-bit compatibility, streamlined 64-bit capability. -

Scalability and Optimization Strategies for GPU Enhanced Neural Networks (Genn)
Scalability and Optimization Strategies for GPU Enhanced Neural Networks (GeNN) Naresh Balaji1, Esin Yavuz2, Thomas Nowotny2 {T.Nowotny, E.Yavuz}@sussex.ac.uk, [email protected] 1National Institute of Technology, Tiruchirappalli, India 2School of Engineering and Informatics, University of Sussex, Brighton, UK Abstract: Simulation of spiking neural networks has been traditionally done on high-performance supercomputers or large-scale clusters. Utilizing the parallel nature of neural network computation algorithms, GeNN (GPU Enhanced Neural Network) provides a simulation environment that performs on General Purpose NVIDIA GPUs with a code generation based approach. GeNN allows the users to design and simulate neural networks by specifying the populations of neurons at different stages, their synapse connection densities and the model of individual neurons. In this report we describe work on how to scale synaptic weights based on the configuration of the user-defined network to ensure sufficient spiking and subsequent effective learning. We also discuss optimization strategies particular to GPU computing: sparse representation of synapse connections and occupancy based block-size determination. Keywords: Spiking Neural Network, GPGPU, CUDA, code-generation, occupancy, optimization 1. Introduction The computational performance of traditional single-core CPUs has steadily increased since its arrival, primarily due to the combination of increased clock frequency, process technology advancements and compiler optimizations. The clock frequency was pushed higher and higher, from 5 MHz to 3 GHz in the years from 1983 to 2002, until it reached a stall a few years ago [1] when the power consumption and dissipation of the transistors reached peaks that could not compensated by its cost [2]. -
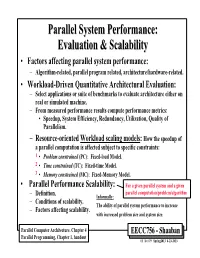
Parallel System Performance: Evaluation & Scalability
ParallelParallel SystemSystem Performance:Performance: EvaluationEvaluation && ScalabilityScalability • Factors affecting parallel system performance: – Algorithm-related, parallel program related, architecture/hardware-related. • Workload-Driven Quantitative Architectural Evaluation: – Select applications or suite of benchmarks to evaluate architecture either on real or simulated machine. – From measured performance results compute performance metrics: • Speedup, System Efficiency, Redundancy, Utilization, Quality of Parallelism. – Resource-oriented Workload scaling models: How the speedup of a parallel computation is affected subject to specific constraints: 1 • Problem constrained (PC): Fixed-load Model. 2 • Time constrained (TC): Fixed-time Model. 3 • Memory constrained (MC): Fixed-Memory Model. • Parallel Performance Scalability: For a given parallel system and a given parallel computation/problem/algorithm – Definition. Informally: – Conditions of scalability. The ability of parallel system performance to increase – Factors affecting scalability. with increased problem size and system size. Parallel Computer Architecture, Chapter 4 EECC756 - Shaaban Parallel Programming, Chapter 1, handout #1 lec # 9 Spring2013 4-23-2013 Parallel Program Performance • Parallel processing goal is to maximize speedup: Time(1) Sequential Work Speedup = < Time(p) Max (Work + Synch Wait Time + Comm Cost + Extra Work) Fixed Problem Size Speedup Max for any processor Parallelizing Overheads • By: 1 – Balancing computations/overheads (workload) on processors -

Computer Architecture Out-Of-Order Execution
Computer Architecture Out-of-order Execution By Yoav Etsion With acknowledgement to Dan Tsafrir, Avi Mendelson, Lihu Rappoport, and Adi Yoaz 1 Computer Architecture 2013– Out-of-Order Execution The need for speed: Superscalar • Remember our goal: minimize CPU Time CPU Time = duration of clock cycle × CPI × IC • So far we have learned that in order to Minimize clock cycle ⇒ add more pipe stages Minimize CPI ⇒ utilize pipeline Minimize IC ⇒ change/improve the architecture • Why not make the pipeline deeper and deeper? Beyond some point, adding more pipe stages doesn’t help, because Control/data hazards increase, and become costlier • (Recall that in a pipelined CPU, CPI=1 only w/o hazards) • So what can we do next? Reduce the CPI by utilizing ILP (instruction level parallelism) We will need to duplicate HW for this purpose… 2 Computer Architecture 2013– Out-of-Order Execution A simple superscalar CPU • Duplicates the pipeline to accommodate ILP (IPC > 1) ILP=instruction-level parallelism • Note that duplicating HW in just one pipe stage doesn’t help e.g., when having 2 ALUs, the bottleneck moves to other stages IF ID EXE MEM WB • Conclusion: Getting IPC > 1 requires to fetch/decode/exe/retire >1 instruction per clock: IF ID EXE MEM WB 3 Computer Architecture 2013– Out-of-Order Execution Example: Pentium Processor • Pentium fetches & decodes 2 instructions per cycle • Before register file read, decide on pairing Can the two instructions be executed in parallel? (yes/no) u-pipe IF ID v-pipe • Pairing decision is based… On data -
Multiprocessing and Scalability
Multiprocessing and Scalability A.R. Hurson Computer Science and Engineering The Pennsylvania State University 1 Multiprocessing and Scalability Large-scale multiprocessor systems have long held the promise of substantially higher performance than traditional uni- processor systems. However, due to a number of difficult problems, the potential of these machines has been difficult to realize. This is because of the: Fall 2004 2 Multiprocessing and Scalability Advances in technology ─ Rate of increase in performance of uni-processor, Complexity of multiprocessor system design ─ This drastically effected the cost and implementation cycle. Programmability of multiprocessor system ─ Design complexity of parallel algorithms and parallel programs. Fall 2004 3 Multiprocessing and Scalability Programming a parallel machine is more difficult than a sequential one. In addition, it takes much effort to port an existing sequential program to a parallel machine than to a newly developed sequential machine. Lack of good parallel programming environments and standard parallel languages also has further aggravated this issue. Fall 2004 4 Multiprocessing and Scalability As a result, absolute performance of many early concurrent machines was not significantly better than available or soon- to-be available uni-processors. Fall 2004 5 Multiprocessing and Scalability Recently, there has been an increased interest in large-scale or massively parallel processing systems. This interest stems from many factors, including: Advances in integrated technology. Very -

Pascal Viewer: a Tool for the Visualization of Parallel Scalability Trends
PaScal Viewer: a Tool for the Visualization of Parallel Scalability Trends 1st Anderson B. N. da Silva 2nd Daniel A. M. Cunha Pro-Reitoria´ de Pesquisa, Inovac¸ao˜ e Pos-Graduac¸´ ao˜ Dept. de Eng. de Comp. e Automac¸ao˜ Instituto Federal da Paraiba Univ. Federal do Rio Grande do Norte Joao Pessoa, Brazil Natal, Brazil [email protected] [email protected] 3st Vitor R. G. Silva 4th Alex F. de A. Furtunato 5th Samuel Xavier de Souza Dept. de Eng. de Comp. e Automac¸ao˜ Diretoria de Tecnologia da Informac¸ao˜ Dept. de Eng. de Comp. e Automac¸ao˜ Univ. Federal do Rio Grande do Norte Instituto Federal do Rio Grande do Norte Univ. Federal do Rio Grande do Norte Natal, Brazil Natal, Brazil Natal, Brazil [email protected] [email protected] [email protected] Abstract—Taking advantage of the growing number of cores particular environment. The configuration of this environment in supercomputers to increase the scalabilty of parallel programs includes the number of cores, their operating frequency, and is an increasing challenge. Many advanced profiling tools have the size of the input data or the problem size. Among the var- been developed to assist programmers in the process of analyzing data related to the execution of their program. Programmers ious collected information, the elapsed time in each function can act upon the information generated by these data and make of the code, the number of function calls, and the memory their programs reach higher performance levels. However, the consumption of the program can be cited to name just a few information provided by profiling tools is generally designed [2]. -
CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH 1 Datapath of Ooo Execution Processor
Fiscal Year 2020 Ver. 2021-01-25a Course number: CSC.T433 School of Computing, Graduate major in Computer Science Advanced Computer Architecture 10. Multi-Processor: Distributed Memory and Shared Memory Architecture www.arch.cs.titech.ac.jp/lecture/ACA/ Room No.W936 Kenji Kise, Department of Computer Science Mon 14:20-16:00, Thr 14:20-16:00 kise _at_ c.titech.ac.jp CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH 1 Datapath of OoO execution processor Instruction flow Instruction cache Branch handler Instruction fetch Instruction decode Renaming Register file Dispatch Integer Floating-point Memory Memory dataflow RS Instruction window ALU ALU Branch FP ALU Adr gen. Adr gen. Store Reorder buffer (ROB) queue Data cache Register dataflow CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH Reservation station (RS) 2 Growth in clock rate of microprocessors From CAQA 5th edition CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH 3 From multi-core era to many-core era Single-ISA Heterogeneous Multi-Core Architectures: The Potential for Processor Power Reduction, MICRO-36 CSC.T433 Advanced Computer Architecture, Department of Computer Science, TOKYO TECH 4 Aside: What is a window? • A window is a space in the wall of a building or in the side of a vehicle, which has glass in it so that light can come in and you can see out. (Collins) Instruction window 8 6 5 4 7 (a) Instruction window Instructions to be executed for an application Large instruction -

Computer Architecture: Parallel Processing Basics
Computer Architecture: Parallel Processing Basics Onur Mutlu & Seth Copen Goldstein Carnegie Mellon University 9/9/13 Today What is Parallel Processing? Why? Kinds of Parallel Processing Multiprocessing and Multithreading Measuring success Speedup Amdhal’s Law Bottlenecks to parallelism 2 Concurrent Systems Embedded-Physical Distributed Sensor Claytronics Networks Concurrent Systems Embedded-Physical Distributed Sensor Claytronics Networks Geographically Distributed Power Internet Grid Concurrent Systems Embedded-Physical Distributed Sensor Claytronics Networks Geographically Distributed Power Internet Grid Cloud Computing EC2 Tashi PDL'09 © 2007-9 Goldstein5 Concurrent Systems Embedded-Physical Distributed Sensor Claytronics Networks Geographically Distributed Power Internet Grid Cloud Computing EC2 Tashi Parallel PDL'09 © 2007-9 Goldstein6 Concurrent Systems Physical Geographical Cloud Parallel Geophysical +++ ++ --- --- location Relative +++ +++ + - location Faults ++++ +++ ++++ -- Number of +++ +++ + - Processors + Network varies varies fixed fixed structure Network --- --- + + connectivity 7 Concurrent System Challenge: Programming The old joke: How long does it take to write a parallel program? One Graduate Student Year 8 Parallel Programming Again?? Increased demand (multicore) Increased scale (cloud) Improved compute/communicate Change in Application focus Irregular Recursive data structures PDL'09 © 2007-9 Goldstein9 Why Parallel Computers? Parallelism: Doing multiple things at a time Things: instructions, -

Parallel Programming with Openmp
Parallel Programming with OpenMP OpenMP Parallel Programming Introduction: OpenMP Programming Model Thread-based parallelism utilized on shared-memory platforms Parallelization is either explicit, where programmer has full control over parallelization or through using compiler directives, existing in the source code. Thread is a process of a code is being executed. A thread of execution is the smallest unit of processing. Multiple threads can exist within the same process and share resources such as memory OpenMP Parallel Programming Introduction: OpenMP Programming Model Master thread is a single thread that runs sequentially; parallel execution occurs inside parallel regions and between two parallel regions, only the master thread executes the code. This is called the fork-join model: OpenMP Parallel Programming OpenMP Parallel Computing Hardware Shared memory allows immediate access to all data from all processors without explicit communication. Shared memory: multiple cpus are attached to the BUS all processors share the same primary memory the same memory address on different CPU's refer to the same memory location CPU-to-memory connection becomes a bottleneck: shared memory computers cannot scale very well OpenMP Parallel Programming OpenMP versus MPI OpenMP (Open Multi-Processing): easy to use; loop-level parallelism non-loop-level parallelism is more difficult limited to shared memory computers cannot handle very large problems An alternative is MPI (Message Passing Interface): require low-level programming; more difficult programming