Developing On-Orbit Servicing Concepts, Technology Options, and Roadmap
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Russia's Posture in Space
Russia’s Posture in Space: Prospects for Europe Executive Summary Prepared by the European Space Policy Institute Marco ALIBERTI Ksenia LISITSYNA May 2018 Table of Contents Background and Research Objectives ........................................................................................ 1 Domestic Developments in Russia’s Space Programme ............................................................ 2 Russia’s International Space Posture ......................................................................................... 4 Prospects for Europe .................................................................................................................. 5 Background and Research Objectives For the 50th anniversary of the launch of Sputnik-1, in 2007, the rebirth of Russian space activities appeared well on its way. After the decade-long crisis of the 1990s, the country’s political leadership guided by President Putin gave new impetus to the development of national space activities and put the sector back among the top priorities of Moscow’s domestic and foreign policy agenda. Supported by the progressive recovery of Russia’s economy, renewed political stability, and an improving external environment, Russia re-asserted strong ambitions and the resolve to regain its original position on the international scene. Towards this, several major space programmes were adopted, including the Federal Space Programme 2006-2015, the Federal Target Programme on the development of Russian cosmodromes, and the Federal Target Programme on the redeployment of GLONASS. This renewed commitment to the development of space activities was duly reflected in a sharp increase in the country’s launch rate and space budget throughout the decade. Thanks to the funds made available by flourishing energy exports, Russia’s space expenditure continued to grow even in the midst of the global financial crisis. Besides new programmes and increased funding, the spectrum of activities was also widened to encompass a new focus on space applications and commercial products. -

Maxar Technologies with Respect to Future Events, Financial Performance and Operational Capabilities
Leading Innovation in the New Space Economy Howard L. Lance President and Chief Executive Officer Forward-Looking Statement This presentation contains forward-looking statements and information, which reflect the current view of Maxar Technologies with respect to future events, financial performance and operational capabilities. The forward-looking statements in this presentation include statements as to managements’ expectations with respect to: the benefits of the transaction and strategic and integration opportunities; the company’s plans, objectives, expectations and intentions; expectations for sales growth, synergies, earnings and performance; shareholder value; and other statements that are not historical facts. Although management of the Company believes that the expectations and assumptions on which such forward-looking statements are based are reasonable, undue reliance should not be placed on the forward-looking statements because the Company can give no assurance that they will prove to be correct. Any such forward-looking statements are subject to various risks and uncertainties which could cause actual results and experience to differ materially from the anticipated results or expectations expressed in this presentation. Additional information concerning these risk factors can be found in the Company’s filings with Canadian securities regulatory authorities, which are available online under the Company’s profile at www.sedar.com, the Company’s filings with the United States Securities and Exchange Commission, or on the Company’s website at www.maxar.com, and in DigitalGlobe’s filings with the SEC, including Item 1A of DigitalGlobe’s Annual Report on Form 10-K for the year ended December 31, 2016. The forward-looking statements contained in this presentation are expressly qualified in their entirety by the foregoing cautionary statements and are based upon data available as of the date of this release and speak only as of such date. -

Final Report of the International Space Station Independent Safety
I Contents Executive Summary........................................................................................ 1 Principal Observations ..................................................................................... 3 Principal Recommendations ............................................................................. 3 1. Introduction..................................................................................................... 5 Charter/Scope ................................................................................................... 5 Approach........................................................................................................... 5 Report Organization ......................................................................................... 5 2. The International Space Station Program.................................................... 7 International Space Station Characteristics..................................................... 8 3. International Space Station Crosscutting Management Functions............ 12 Robust On-Orbit Systems.................................................................................. 12 The Design ........................................................................................................ 12 Verification Requirements ................................................................................ 12 Physical (Fit) Verification ................................................................................ 13 Multi-element Integrated Test.......................................................................... -

Robotic Arm.Indd
Ages: 8-12 Topic: Engineering design and teamwork Standards: This activity is aligned to national standards in science, technology, health and mathematics. Mission X: Train Like an Astronaut Next Generation: 3-5-ETS1-2. Generate and compare multiple possible solutions to a problem based on how well each is likely A Robotic Arm to meet the criteria and constraints of the problem. 3-5-ETS1-3. Plan and carry out fair tests in which variables are controlled and failure points are considered to identify aspects of a model or prototype that can be EDUCATOR SECTION (PAGES 1-7) improved. STUDENT SECTION (PAGES 8-15) Background Why do we need robotic arms when working in space? As an example, try holding a book in your hands straight out in front of you and not moving them for one or two minutes. After a while, do your hands start to shake or move around? Imagine how hard it would be to hold your hands steady for many days in a row, or to lift something really heavy. Wouldn’t it be nice to have a really long arm that never gets tired? Well, to help out in space, scientists have designed and used robotic arms for years. On Earth, scientists have designed robotic arms for everything from moving heavy equipment to performing delicate surgery. Robotic arms are important machines that help people work on Earth as well as in space. Astronaut attached to a robotic arm on the ISS. Look at your arms once again. Your arms are covered in skin for protection. -
International Space Station Program Mobile Servicing System (MSS) To
SSP 42004 Revision E Mobile Servicing System (MSS) to User (Generic) Interface Control Document Part I International Space Station Program Revision E, May 22, 1997 Type 1 Approved by NASA National Aeronautics and Space Administration International Space Station Program Johnson Space Center Houston, Texas Contract No. NAS15–10000 SSP 42004, Part 1, Revision E May 22, 1997 REVISION AND HISTORY PAGE REV. DESCRIPTION PUB. DATE C Totally revised Space Station Freedom Document into an International Space Station Alpha Document 03–14–94 D Revision D reference PIRNs 42004–CS–0004A, 42004–NA–0002, 42004–NA–0003, TBD 42004–NA–0004, 42004–NA–0007D, 42004–NA–0008A, 42004–NA–0009C, 42004–NA–0010B, 42004–NA–0013A SSP 42004, Part 1, Revision E May 22, 1997 INTERNATIONAL SPACE STATION PROGRAM MOBILE SERVICING SYSTEM TO USER (GENERIC) INTERFACE CONTROL DOCUMENT MAY 22, 1997 CONCURRENCE PREPARED BY: PRINT NAME ORGN SIGNATURE DATE CHECKED BY: PRINT NAME ORGN SIGNATURE DATE SUPERVISED BY (BOEING): PRINT NAME ORGN SIGNATURE DATE SUPERVISED BY (NASA): PRINT NAME ORGN SIGNATURE DATE DQA: PRINT NAME ORGN SIGNATURE DATE i SSP 42004, Part 1, Revision E May 22, 1997 NASA/CSA INTERNATIONAL SPACE STATION PROGRAM MOBILE SERVICING SYSTEM (MSS) TO USER INTERFACE CONTROL DOCUMENT MAY 22, 1997 Print Name For NASA DATE Print Name For CSA DATE ii SSP 42004, Part 1, Revision E May 22, 1997 PREFACE SSP 42004, Mobile Servicing System (MSS) to User Interface Control Document (ICD) Part I shall be implemented on all new Program contractual and internal activities and shall be included in any existing contracts through contract changes. -

NASA's Lunar Orbital Platform-Gatway
The Space Congress® Proceedings 2018 (45th) The Next Great Steps Feb 28th, 9:00 AM NASA's Lunar Orbital Platform-Gatway Tracy Gill NASA/KSC Technology Strategy Manager Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Gill, Tracy, "NASA's Lunar Orbital Platform-Gatway" (2018). The Space Congress® Proceedings. 17. https://commons.erau.edu/space-congress-proceedings/proceedings-2018-45th/presentations/17 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. National Aeronautics and Space Administration NASA’s Lunar Orbital Platform- Gateway Tracy Gill NASA/Kennedy Space Center Exploration Research & Technology Programs February 28, 2018 45th Space Congress Space Policy Directive-1 “Lead an innovative and sustainable program of exploration with commercial and international partners to enable human expansion across the solar system and to bring back to Earth new knowledge and opportunities. Beginning with missions beyond low-Earth orbit, the United States will lead the return of humans to the Moon for long-term exploration and utilization, followed by human missions to Mars and other destinations.” 2 LUNAR EXPLORATION CAMPAIGN 3 4 STRATEGIC PRINCIPLES FOR SUSTAINABLE EXPLORATION • FISCAL REALISM • ECONOMIC OPPORTUNITY Implementable in the near-term with the buying -
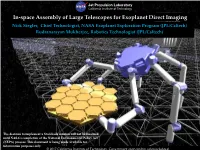
In-Space Assembly of Large Telescopes for Exoplanet
In-space Assembly of Large Telescopes for Exoplanet Direct Imaging Nick Siegler, Chief Technologist, NASA Exoplanet Exploration Program (JPL/Caltech) Rudranarayan Mukherjee, Robotics Technologist (JPL/Caltech) The decision to implement a Starshade mission will not be finalized until NASA’s completion of the National Environmental Policy Act (NEPA) process. This document is being made available for information purposes only. © 2017 California Institute of Technology. Government sponsorship acknowledged. Aperture size limited by launch vehicle Future science needs will require increasingly large telescopes In-Space Large Aperture Telescope Assembly Evolvable Space Telescope (NGAS) 5 6 4 1 3 2 3 4 m 1 2 Polidan et al. 2016 3 In-Space Large Aperture Telescope Assembly Using the Deep Space Gateway (cis-Lunar orbit) to assemble NASA GSFC 4 In-Space Large Aperture Telescope Upgrade Telescope returns from ESL2 for servicing at EML1 Courtesy: Future In-Space Operations (FISO) working group (2007) 5 In-Space Large Aperture Telescope Assembly Free-fliers (e.g. Orion) and assembly module docked to spacecraft bus NASA GSFC 6 DARPA Orbital Express (2007) • Multiple OEDMS autonomous berthing and docking maneuvers In-space firsts: • Transfer of fuel • Transfer of a battery through the use of 3-m long Astro robotic arm NEXTSat DARPA/Boeing/MDA/Ball Aerospace jpl.nasa.gov 7 Robotic Servicing Missions DARPA Robotic Servicing of Geosynchronous Satellites (RSGS) (SSL) DARPAjpl.nasa.gov Robotic Servicing Missions Restore-L (NASA GSFC) • Refueling an existing -
Downloaded for Infrastructure GIS Data
NATIONAL TECHNICAL DOCUMENT FOR ESTABLISHING CARTOGRAPHIC BASE IN INDIA Generation of Large Scale (1:10,000; 1:2,000 & Lesser) Maps for Disaster Management and Planning March 2016 National Disaster Management Authority Government of India CONTENTS Table of Contents Foreword i Preface ii Acknowledgement iii Table of Contents iv-vii List of Figures and Tables viii-ix Abbreviations x-xii Glossary of Terms xiii-xv Generation of National Topographic Database (NTDB) For 1:10,000; 1:2,000 & 1 1 Lesser Scale 1.1 Mapping at 1:10,000; 1:2,000 & Lesser Scale 2 1.2 NTDB on 1:10,000; 1:2,000 & Lesser Scale- A National Need 2 2 Geographical Information System for Disaster Management 3 2.1 GIS in Different Phases of Disaster Management 3-6 2.2 GIS database for Disaster Management 7-8 2.3 Scope for developing a GIS database for Disaster Management 8 2.4 Projection System 8 2.5 Positional Accuracy 8 2.6 Technology 8 2.7 Functional Requirements for Database Management 8-9 3 Critical Facilities Mapping (CFM) 10 3.1 Defining Critical Facilities for Mapping 10-11 4 Geo-referencing of Satellite Imagery 12-13 Technology for 1:10,000 Scale Mapping 14 5 Various Methodologies Available for Preparing Maps of Scale1:10,000 from 15 Images 5.1 Satellite Imaging 15 5.2 Aerial Photography 15 5.3 Comparison Between Satellite Imaging and Aerial Mapping 16 5.3.1 General Differences 16 5.3.2 Comparison of Accuracy of Imaging 17-18 5.4 Comparison of Ground Sampling Distance (GSD) for Satellite Imaging and 18-19 Aerial Photogrammetry 5.5 Aerial Mapping 20 5.5.1 Map Checking -

On-Orbit Assembly of Space Assets: a Path to Affordable and Adaptable Space Infrastructure
CENTER FOR SPACE POLICY AND STRATEGY FEBRUARY 2018 ON-ORBIT ASSEMBLY OF SPACE ASSETS: A PATH TO AFFORDABLE AND ADAPTABLE SPACE INFRASTRUCTURE DANIELLE PISKORZ AND KAREN L. JONES THE AEROSPACE CORPORATION © 2018 The Aerospace Corporation. All trademarks, service marks, and trade names contained herein are the property of their respective owners. Approved for public release; distribution unlimited. OTR201800234 DANIELLE PISKORZ Dr. Danielle Piskorz is a member of the technical staff in The Aerospace Corporation’s Visual and Infrared Sensor Systems Department. She provides data and mission performance analysis in the area of space situational awareness. Her space policy experience derives from positions at the Science and Technology Policy Institute and the National Academies of Sciences, Engineering, and Medicine, where she contributed to a broad range of projects in commercial and civil space. She holds a Ph.D. in planetary science from the California Institute of Technology and a B.S. in physics from Massachusetts Institute of Technology. KAREN L. JONES Karen Jones is a senior project leader with The Aerospace Corporation’s Center for Space Policy and Strategy. She has experience and expertise in the disciplines of technology strategy, program evaluation, and regulatory and policy analysis spanning the public sector, telecommunications, aerospace defense, energy, and environmental industries. She has an M.B.A. from the Yale School of Management. CONTRIBUTORS The authors would like to acknowledge contributions from Roy Nakagawa, Henry Helvajian, and Thomas Heinsheimer of The Aerospace Corporation and David Barnhart of the University of Southern California. ABOUT THE CENTER FOR SPACE POLICY AND STRATEGY The Center for Space Policy and Strategy is a specialized research branch within The Aerospace Corporation, a nonprofit organization that operates a federally funded research and development center providing objective technical analysis for programs of national significance. -

The International Space Station Partners: Background and Current Status
The Space Congress® Proceedings 1998 (35th) Horizons Unlimited Apr 28th, 2:00 PM Paper Session I-B - The International Space Station Partners: Background and Current Status Daniel V. Jacobs Manager, Russian Integration, International Partners Office, International Space Station ogrPr am, NASA, JSC Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Jacobs, Daniel V., "Paper Session I-B - The International Space Station Partners: Background and Current Status" (1998). The Space Congress® Proceedings. 18. https://commons.erau.edu/space-congress-proceedings/proceedings-1998-35th/april-28-1998/18 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. THE INTERNATIONAL SPACE STATION: BACKGROUND AND CURRENT STATUS Daniel V. Jacobs Manager, Russian Integration, International Partners Office International Space Station Program, NASA Johnson Space Center Introduction The International Space Station, as the largest international civil program in history, features unprecedented technical, managerial, and international complexity. Seven interna- tional partners and participants encompassing fifteen countries are involved in the ISS. Each partner is designing, developing and will be operating separate pieces of hardware, to be inte- grated on-orbit into a single orbital station. Mission control centers, launch vehicles, astronauts/ cosmonauts, and support services will be provided by multiple partners, but functioning in a coordinated, integrated fashion. A number of major milestones have been accomplished to date, including the construction of major elements of flight hardware, the development of opera- tions and sustaining engineering centers, astronaut training, and seven Space Shuttle/Mir docking missions. -
IFC-AMC Motion to Dismiss
Case 1:17-cv-01494-VAC-SRF Document 34-1 Filed 02/16/18 Page 1 of 1 PageID #: 1030 IN THE UNITED STATES DISTRICT COURT FOR THE DISTRICT OF DELAWARE JUANA DOE I et al., § § Plaintiffs, § § vs. § § C.A. No. 17-1494-VAC-SRF IFC ASSET MANAGEMENT COMPANY, § LLC, § § Defendant. § [PROPOSED] ORDER WHEREAS, Defendant IFC Asset Management Company, LLC, having moved to dismiss the claims in Plaintiff Juana Doe I et al.’s Complaint (D.I. 1); and, WHEREAS, the Court having considered the briefs and arguments in support of and in opposition to said Motion; IT IS HEREBY ORDERED this _______ day of ____________, 2018, that the Motion is GRANTED. Plaintiffs’ Complaint is dismissed with prejudice. _______________________________ United States District Judge RLF1 18887565v.1 Case 1:17-cv-01494-VAC-SRF Document 34-1 Filed 02/16/18 Page 1 of 1 PageID #: 1030 IN THE UNITED STATES DISTRICT COURT FOR THE DISTRICT OF DELAWARE JUANA DOE I et al., § § Plaintiffs, § § vs. § § C.A. No. 17-1494-VAC-SRF IFC ASSET MANAGEMENT COMPANY, § LLC, § § Defendant. § [PROPOSED] ORDER WHEREAS, Defendant IFC Asset Management Company, LLC, having moved to dismiss the claims in Plaintiff Juana Doe I et al.’s Complaint (D.I. 1); and, WHEREAS, the Court having considered the briefs and arguments in support of and in opposition to said Motion; IT IS HEREBY ORDERED this _______ day of ____________, 2018, that the Motion is GRANTED. Plaintiffs’ Complaint is dismissed with prejudice. _______________________________ United States District Judge RLF1 18887565v.1 Case 1:17-cv-01494-VAC-SRF Document 35 Filed 02/16/18 Page 1 of 51 PageID #: 1031 IN THE UNITED STATES DISTRICT COURT FOR THE DISTRICT OF DELAWARE JUANA DOE I et al., § § Plaintiffs, § § vs. -

A Call for a New Human Missions Cost Model
A Call For A New Human Missions Cost Model NASA 2019 Cost and Schedule Analysis Symposium NASA Johnson Space Center, August 13-15, 2019 Joseph Hamaker, PhD Christian Smart, PhD Galorath Human Missions Cost Model Advocates Dr. Joseph Hamaker Dr. Christian Smart Director, NASA and DoD Programs Chief Scientist • Former Director for Cost Analytics • Founding Director of the Cost and Parametric Estimating for the Analysis Division at NASA U.S. Missile Defense Agency Headquarters • Oversaw development of the • Originator of NASA’s NAFCOM NASA/Air Force Cost Model cost model, the NASA QuickCost (NAFCOM) Model, the NASA Cost Analysis • Provides subject matter expertise to Data Requirement and the NASA NASA Headquarters, DARPA, and ONCE database Space Development Agency • Recognized expert on parametrics 2 Agenda Historical human space projects Why consider a new Human Missions Cost Model Database for a Human Missions Cost Model • NASA has over 50 years of Human Space Missions experience • NASA’s International Partners have accomplished additional projects . • There are around 70 projects that can provide cost and schedule data • This talk will explore how that data might be assembled to form the basis for a Human Missions Cost Model WHY A NEW HUMAN MISSIONS COST MODEL? NASA’s Artemis Program plans to Artemis needs cost and schedule land humans on the moon by 2024 estimates Lots of projects: Lunar Gateway, Existing tools have some Orion, landers, SLS, commercially applicability but it seems obvious provided elements (which we may (to us) that a dedicated HMCM is want to independently estimate) needed Some of these elements have And this can be done—all we ongoing cost trajectories (e.g.