Linearized Longitudinal Equations of Motion
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Shelf List 05/31/2011 Matches 4631
Shelf List 05/31/2011 Matches 4631 Call# Title Author Subject 000.1 WARBIRD MUSEUMS OF THE WORLD EDITORS OF AIR COMBAT MAG WAR MUSEUMS OF THE WORLD IN MAGAZINE FORM 000.10 FLEET AIR ARM MUSEUM, THE THE FLEET AIR ARM MUSEUM YEOVIL, ENGLAND 000.11 GUIDE TO OVER 900 AIRCRAFT MUSEUMS USA & BLAUGHER, MICHAEL A. EDITOR GUIDE TO AIRCRAFT MUSEUMS CANADA 24TH EDITION 000.2 Museum and Display Aircraft of the World Muth, Stephen Museums 000.3 AIRCRAFT ENGINES IN MUSEUMS AROUND THE US SMITHSONIAN INSTITUTION LIST OF MUSEUMS THROUGH OUT THE WORLD WORLD AND PLANES IN THEIR COLLECTION OUT OF DATE 000.4 GREAT AIRCRAFT COLLECTIONS OF THE WORLD OGDEN, BOB MUSEUMS 000.5 VETERAN AND VINTAGE AIRCRAFT HUNT, LESLIE LIST OF COLLECTIONS LOCATION AND AIRPLANES IN THE COLLECTIONS SOMEWHAT DATED 000.6 VETERAN AND VINTAGE AIRCRAFT HUNT, LESLIE AVIATION MUSEUMS WORLD WIDE 000.7 NORTH AMERICAN AIRCRAFT MUSEUM GUIDE STONE, RONALD B. LIST AND INFORMATION FOR AVIATION MUSEUMS 000.8 AVIATION AND SPACE MUSEUMS OF AMERICA ALLEN, JON L. LISTS AVATION MUSEUMS IN THE US OUT OF DATE 000.9 MUSEUM AND DISPLAY AIRCRAFT OF THE UNITED ORRISS, BRUCE WM. GUIDE TO US AVIATION MUSEUM SOME STATES GOOD PHOTOS MUSEUMS 001.1L MILESTONES OF AVIATION GREENWOOD, JOHN T. EDITOR SMITHSONIAN AIRCRAFT 001.2.1 NATIONAL AIR AND SPACE MUSEUM, THE BRYAN, C.D.B. NATIONAL AIR AND SPACE MUSEUM COLLECTION 001.2.2 NATIONAL AIR AND SPACE MUSEUM, THE, SECOND BRYAN,C.D.B. MUSEUM AVIATION HISTORY REFERENCE EDITION Page 1 Call# Title Author Subject 001.3 ON MINIATURE WINGS MODEL AIRCRAFT OF THE DIETZ, THOMAS J. -
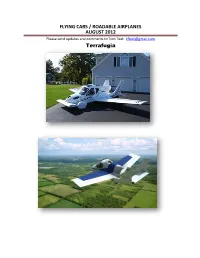
FLYING CARS / ROADABLE AIRPLANES AUGUST 2012 Please Send Updates and Comments to Tom Teel: [email protected] Terrafugia
FLYING CARS / ROADABLE AIRPLANES AUGUST 2012 Please send updates and comments to Tom Teel: [email protected] Terrafugia INTERNATIONAL FLYING CAR ASSOCIATION http://www.flyingcarassociation.com We'd like to welcome you to the International Flying Car Association. Our goal is to help advance the emerging flying car industry by creating a central resource for information and communication between those involved in the industry, news networks, governments, and those seeking further information worldwide. The flying car industry is in its formative stages, and so is IFCA. Until this site is fully completed, we'd like to recommend you visit one of these IFCA Accredited Sites. www.flyingcars.com www.flyingcarreviews.com www.flyingcarnews.com www.flyingcarforums.com REFERENCE INFORMATION Roadable Times http://www.roadabletimes.com Transformer - Coming to a Theater Near You? http://www.aviationweek.com/Blogs.aspx?plckBlo PARAJET AUTOMOTIVE - SKYCAR gId=Blog:a68cb417-3364-4fbf-a9dd- http://www.parajetautomotive.com/ 4feda680ec9c&plckController=Blog&plckBlogPage= In January 2009 the Parajet Skycar expedition BlogViewPost&newspaperUserId=a68cb417-3364- team, led by former British army officer Neil 4fbf-a9dd- Laughton and Skycar inventor Gilo Cardozo 4feda680ec9c&plckPostId=Blog%253aa68cb417- successfully completed its inaugural flight, an 3364-4fbf-a9dd- incredible journey from the picturesque 4feda680ec9cPost%253a6b784c89-7017-46e5- surroundings of London to Tombouctou. 80f9- Supported by an experienced team of overland 41a312539180&plckScript=blogScript&plckElement -

České Vysoké Učení Technické V Praze Fakulta Dopravní
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ DIPLOMOVÁ PRÁCE 2016 Bc. Veronika KOČOVÁ ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE FAKULTA DOPRAVNÍ Veronika Kočová STUDIE REALIZOVATELNOSTI KOMBINOVANÉHO DOPRAVNÍHO PROSTŘEDKU AUTOMOBIL/LETADLO Diplomová práce 2016 Prohlášení Prohlašuji, ţe jsem předloţenou práci vypracovala samostatně a ţe jsem uvedla veškeré pouţité informační zdroje v souladu s Metodickým pokynem o etické přípravě vysokoškolských závěrečných prací. Nemám závaţný důvod proti uţívání tohoto školního díla ve smyslu § 60 Zákona č.121/2000 Sb. o právu autorském, o právech souvisejících s právem autorským a o změně některých zákonů (autorský zákon). V Praze dne 25. listopadu 2015 ……………………………………. Veronika Kočová 2 Poděkování Ráda bych na tomto místě poděkovala všem, kteří mi poskytli podklady pro vypracování této práce. Děkuji Ing. Martinovi Novákovi, Ph.D. a Ing. Robertu Theinerovi, Ph.D. za odborné vedení a cenné připomínky, kterými přispěli k vypracování mé diplomové práce. Zvláště bych ráda poděkovala Ing. Janu Šimůnkovi za odborné konzultace a rady. 3 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta dopravní STUDIE REALIZOVATELNOSTI KOMBINOVANÉHO DOPRAVNÍHO PROSTŘEDKU AUTOMOBIL/LETADLO diplomová práce leden 2016 Veronika Kočová Abstrakt Tématem této diplomové práce je Studie realizovatelnosti kombinovaného dopravního prostředku automobil/letadlo. Práce definuje konkrétní projekt Air car city a určuje základní technické podmínky a poţadavky v České republice pro schválení všech jeho částí. Součástí práce je zjištění statistických údajů o autoletadlech obecně z hlediska času, ceny a názoru veřejnosti. Klíčová slova: Autoletadlo, Air car city, letoun, vozidlo, miniautomobil Abstract The theme of this thesis is to study the feasibility of a combined transport car / plane. The work defines a specific project Air car city and determines the basic technical conditions and requirements in the Czech Republic for approval of its parts. -

Waterman Arrowbile
Waterman Arrowbile by Paolo Severin www.paoloseverin.it 1 Waterman Arrowbile Pubblicato su Settimo Cielo 2009 When some friend of mine walks in sticking out and I would never accept my workshop and see what i am wor- that. Probabily the problem could king at, usually asks me if i am crazy. have been solved using a modern In all honesty i have to admit that and effi cient electric motor, but sometime i wonder if i am, but then i unfortunately I can not accept such say that they are the crazy ones and option either: the smell of fuel and the fi rst successful fl ying wing in the i go on… the sound of the internal combustion USA, but also the fi rst step towards engine fascinates me in a way that I a plane that could be converted in a can not still live without it. fl ying car. The prototype in 1932, named “What- sit” for his unconventional design, open the way to the “Arrowbile” in 1935 designed and built for a con- test announced by the US depart- ment of commerce.It was powered by a Menasco C-4 ,95 HP and in 1935 fl ew from Santa Monica to Wa- The above to point out that the shington D.C. and granted Waterman Arrowbile project has been a very the contest prize. Having proven that committing task, probably the most So, when i put my hands on a MVVS his project was valid, Waterman de- unique and ambitious that I have 58cc engine, water cooled, with cided to adapt it for ground use. -

M E M O R a N D U M
M E M O R A N D U M PLANNING AND COMMUNITY DEVELOPMENT DEPARTMENT CITY OF SANTA MONICA PLANNING DIVISION DATE: June 11, 2012 TO: Honorable Members of the Landmarks Commission FROM: Planning Staff SUBJECT: 1554 5th Street, LC-12LM-003 Public Hearing to Consider a Landmark Designation Application for the commercial building at 1550 5th Street, 1554-1558 5th Street and 417 Colorado Avenue. PROPERTY OWNER: 1550 5th Street, LLC APPLICANT: City of Santa Monica Landmarks Commission INTRODUCTION & BACKGROUND The subject building, the Goodrum and Vincent Building, was originally constructed in 1928. The building currently houses a Midas muffler repair shop, although a Buick automobile dealership with a appurtenant repair shop, was the original tenant. The Buick dealership vacated the premises in 1935. Midas has been the major tenant in the building since at least 1960. Designed in a Spanish Colonial Revival style with Churriguresque detailing on its exterior and interior, the building has been altered as its use and tenancy has changed over time. Overall, the majority of the building has lost important components of its original architectural integrity, including the removal of storefront windows, the covering of openings, and the removal of its signature band course. Furthermore, the addition of a shotcrete material diminishes what’s left of the plasterwork and compromises the building’s original architectural distinction. Most of the changes and alterations are considered irreversible. Research has shown that the building has an association with the inventor and aviator Waldo Waterman. He first leased the subject property for his company, Waterman Arrowplane Corporation, in 1935. -

The the Roadable Aircraft Story
www.PDHcenter.com www.PDHonline.org Table of Contents What Next, Slide/s Part Description Flying Cars? 1N/ATitle 2 N/A Table of Contents 3~53 1 The Holy Grail 54~101 2 Learning to Fly The 102~155 3 The Challenge 156~194 4 Two Types Roadable 195~317 5 One Way or Another 318~427 6 Between the Wars Aircraft 428~456 7 The War Years 457~572 8 Post-War Story 573~636 9 Back to the Future 1 637~750 10 Next Generation 2 Part 1 Exceeding the Grasp The Holy Grail 3 4 “Ah, but a man’s reach should exceed his grasp, or what’s a heaven f?for? Robert Browning, Poet Above: caption: “The Cars of Tomorrow - 1958 Pontiac” Left: a “Flying Auto,” as featured on the 5 cover of Mechanics and Handi- 6 craft magazine, January 1937 © J.M. Syken 1 www.PDHcenter.com www.PDHonline.org Above: for decades, people have dreamed of flying cars. This con- ceptual design appeared in a ca. 1950s issue of Popular Mechanics The Future That Never Was magazine Left: cover of the Dec. 1947 issue of the French magazine Sciences et Techniques Pour Tous featur- ing GM’s “RocAtomic” Hovercar: “Powered by atomic energy, this vehicle has no wheels and floats a few centimeters above the road.” Designers of flying cars borrowed freely from this image; from 7 the giant nacelles and tail 8 fins to the bubble canopy. Tekhnika Molodezhi (“Tech- nology for the Youth”) is a Russian monthly science ma- gazine that’s been published since 1933. -

345 5 경제환경 2차 2 경상남도 무인항공기 등 산업의 육성 및 지원 조례안 검토보고서.Hwp
(의안번호 제659호) 2017. 6. 19. 제345회 정례회 제2차 경제환경위원회 경상남도 무인항공기 등 산업의 육성 및 지원 조례안 검 토 보 고 서 경제환경위원회 수석전문위원 황외성 (의안번호 제659호) 경상남도 무인항공기 등 산업의 육성 및 지원 조례안 검 토 보 고 서 1. 검토경과 가. 발 의 일 자 : 2017. 3. 31 나. 발 의 자 : 박병영 의원 외 21명 다. 회 부 일 자 : 2017. 3. 31. 2. 제안이유 경상남도 무인항공기 등 산업의 육성 및 지원에 필요한 사항을 규정함으로써 무인항공기 등 산업의 기반을 조성하고 경쟁력을 강화하여 경상남도 경제발전에 이바지하고자 함 3. 주요내용 가. 무인항공기 등 산업의 육성 및 지원을 위한 기본계획의 수립 등을 규정함(안 제5조) 나. 무인항공기 등 산업의 육성 및 해외진출을 위한 사업, 연구개발과 실용화를 위한 사업을 추진할 수 있도록 규정함(안 제6조) 다. 무인항공기 등 산업 육성에 필요한 전문인력 양성에 대하여 규정함(안 제7조) 라. 무인항공기 조정 경기대회 등 관련 대회의 개최 및 지원에 대하여 규정함(안 제8조) 마. 무인항공기 등의 종사자 안전교육 및 무인항공기 등 산업에 관한 실태조사 실시에 대해 각각 규정함(안 제9조부터 안 제10조까지) 바. 무인항공기 등 산업의 연구개발과 실용화에 관한 업무를 위탁할 수 있도록 규정함(안 제11조) 4. 참고사항 가. 관계법규 :「지방자치법」제9조제2항제3호차목 나. 예산조치 : 비용추계 미첨부 사유서 첨부 다. 합 의 : 경상남도 국가산단추진단 의견수렴 라. 기 타 1) 입법예고 가) 기 간 : 2017. 4. 3. ~ 2017. 4. 9. 나) 제출의견 : 없음 2) 규제심사 : 비심사대상 3) 부패영향평가 : 원안 동의 4) 성별영향평가 : 개선사항 없음 5) 지방보조금심의위원회 심의 : 조례안 제12조의 ‘무인항공기 등 관련 연구 및 산업발전’은 포괄적으로 규정하고 있어 직 접 규정으로 볼 수 없으므로 지방재정법 제17조 제4항에 따 라 조문의 삭제(또는 수정)가 필요 - 2 - 5. -

Diplomová Práce Brno 2014 6 Matěj Podhorský
Diplomová práce Abstrakt Tématem diplomové práce je koncepční návrh air-mobilu, tedy létajícího automobilu. Je provedeno srovnání dosavadních koncepcí, technický popis navrhovaného řešení, hmotový rozbor, výpočet aerostatických podkladů, výpočet obálky zatížení a návrh příhradové konstrukce trupu. Jako předpisová báze byl stanoven předpis CS-VLA, případně ELSA-K. Vyhovění požadavkům předpisu je jedním z cílů této práce. Klíčová slova Air-mobil, koncepční návrh, létající automobil, obálka zatížení, polára, předpisová báze, příhradová konstrukce. Abstract The topic of the thesis is a conceptual design of a roadable aircraft. The comparison of existing concepts is made, as well as description of proposed solution, aircraft mass analysis, basic aerostatic calculations, flight and gust envelope calculation and a design of truss construction of the fuselage. The CS-VLA, alternatively ELSA-K, has been used as a certification base. The compliance to this certification specification is one of the goals of this thesis. Keywords Air-mobile, aircraft concept design, roadable aircraft, flight and gust envelope, drag polar, certification specification, truss construction. Bibliografická citace práce PODHORSKÝ, M. Návrh základní koncepce air - mobilu. Brno: Vysoké učení technické v Brně, Fakulta strojního inženýrství, 2014. 66 s. Vedoucí diplomové práce prof. Ing. Antonín Píštěk, CSc.. Brno 2014 6 Matěj Podhorský Koncepční návrh air-mobilu Čestné prohlášení Já, níže podepsaný Matěj Podhorský, prohlašuji, že jsem diplomovou vypracoval samostatně pod vedením prof. Ing. Antonína Píšťka, CSc., a že jsem uvedl všechny použité prameny a literaturu. V Brně, dne 30.5.2014 …………………………. Matěj Podhorský Brno 2014 7 Matěj Podhorský Diplomová práce Poděkování Na tomto místě chci poděkovat vedoucímu diplomové práce prof. Ing. Antonínu Píšťkovi, CSc. -
Eurescom Message Magazine, Summer 2018
Summer 2018 message The magazine for telecom insiders Celtic-Plus Newsletter 1/2018 Smart Transport and Logistics The Kennedy perspective It’s my data, I’ll buy if I want to … Events IEEE 5G Summit Brasilia EuCNC 2018 in Ljubljana A bit beyond Flying cars EURESCOM message Headline Subhead Proposers Day in Madrid 26 September 2018 Discuss your project ideas with potential partners and find You can also have a look at ideas from previous proposers days and get out about funding opportunities in your countries at our next in touch with the proposers. Celtic-Plus Proposers Day in Madrid on 26 September 2018. Further information and registration are available on the Celtic-Plus Celtic-Plus Proposers Days are discussion fora for organisa- website at www.celticplus.eu/event/proposers-day-in-madrid- tions related to telecommunications that are interested to 26-september-2018/ participate in a Celtic-Plus project and want to benefit from performing collaborative research through the EUREKA If you have any questions or need help, do not hesitate to contact the Cluster Celtic-Plus. Celtic-Plus Office – we would be pleased to help you. The follow up cluster CELTIC-NEXT received the EUREKA Label on the Contact 20th of June 2018. It will start its operations in January 2019. The Celtic-Plus Office – [email protected] project ideas that will be presented in Madrid will therefore be the first Peter Herrmann – [email protected] CELTIC projects starting under CELTIC-NEXT. This event is kindly hosted by CDTI. Join the Industry-Driven Research Programme for a Smart Connected World Celtic-Plus Call for Project Proposals – Deadline: 15th October 2018 Benefits of participating in Celtic-Plus Do not miss the opportunity to participate in Celtic-Plus, the ■ You are free to define your project proposal according to your own industry-driven European ICT and telecommunications research research interests and priorities. -

Iprojectfor a Low Priced Airplane - Part 1111
EDITORIAL STAFF Publisher Tom Poberezny Vice-President, Marketing and Communications Dick Matt August 1993 Vol. 21, No.8 Editor·in·Chief Jack Cox Editor Henry G. Frautschy CONTENTS Managing Editor Golda Cox Art Director 1 Straight & Level/ Mike D rucks Espi e "Butch" Joyce Computer Graphic Specialists Olivia l. Phillip 2 AIC News/ Sara Hansen Jennifer Larsen compiled by H.G. Frautschy Advertising Mary Jones 4 Type Club Notes/ Associate Editor compiled by Norm Petersen Norm Petersen 5 Vintage Literature/ Feature Writers George Hardie, Jr. Dennis Parks Dennis Parks Page 9 Staff Photographers Jim Koepnick Mike Steineke 9 Aircraft Tiedowns Carl Schuppel Donna Bushman And Control Locks/ Editorial Assistant Harold Armstrong Isabelle Wiske and H.G. Frautschy EAA ANTIQUE/CLASSIC DIVISION, INC, 13 Partnership Aeronca/ OFFICERS H.G. Frautschy President Vice·President Espie 'Butch' Joyce Arthur Morgan 18 Dwain Pittenger's 604 Highway SI. 3744 North 51st Blvd. Madison, NC 27025 Milwaukee, WI 53216 A ward Winning Bamboo Bomber/ 919/427-0216 414/442·3631 Norm Petersen Secretory Treasurer Steve Nesse E.E, 'Buck' Hilbert 21 Vintage Seaplanes/ 2009 Highland Ave. P.O. Box 424 Albert Leo, MN fH:IJ7 Union, IL 60180 Norm Petersen 507/373-1674 815/923·4591 23 Pass it to Buckl DIRECTORS John Berendt Robert C. 'Bob' Brauer E.E. " Buck" Hilbert 7645 Echo Point Rd. 9345 S. Hoyne Connon Falls, MN 55009 Chicago, IL 60620 25 AlC Calendar 507/263-2414 312/779-2105 Gene Chose John S. Copeland 26 Mystery Plane/ 2159 Carlton Rd. 28-3 Williamsburg Ct. Oshkosh, WI 54904 Shrewsbury, MA 01545 George H ardie 414/231-5002 508/842·7867 Phil Coulson George Daubner 28 Welcome New Members 28415 Springbrook Dr. -

An Integrated Decision-Making Framework for Transportation Architectures: Application to Aviation Systems Design
An Integrated Decision-Making Framework for Transportation Architectures: Application to Aviation Systems Design A Dissertation Presented to The Academic Faculty by Jung-Ho Lewe In Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy School of Aerospace Engineering Georgia Institute of Technology April 2005 An Integrated Decision-Making Framework for Transportation Architectures: Application to Aviation Systems Design Approved by: Daniel P. Schrage, Ph.D. Daniel A. DeLaurentis, Ph.D. Professor, Aerospace Engineering, Com- Assistant Professor, Aeronautics and As- mittee Chair tronautics, Purdue University Dimitri N. Mavris, Ph.D. Alan Wilhite, Ph.D. Professor, Aerospace Engineering, Co- Langley Professor, National Institute of advisor Aerospace Amy R. Pritchett, Sci.D. Mark D. Moore Associate Professor, Aerospace Engineer- Personal Air Vehicle Sector Manager, ing NASA Vehicle Systems Program Date Approved: April 18, 2005 To my family “There's nothing new under the sun, but there are lots of old things we don't know.” iii ACKNOWLEDGEMENTS I would like to thank my committee for their guidance and support in the course of my research. It was their vision, intelligence, expertise, dedication, academic rigor and in- tegrity that saw me through. Thank you again Drs. Schrage, Mavris, Pritchett, DeLaurentis, Wilhite and Mr. Moore. I truly consider this dissertation a culmination of your efforts with only my two cents. There are many smart and friendly students and colleagues whose contributions I also appreciate; each member of the SATS competition team, the PAVE project team and the MIDAS squad. I have enjoyed the friendship and collaboration which I wish to continue, and I thank you all. -

Histoire De La Voiture Volante Les Six Concepts De La Voiture Volante 1917 : L'avion‐Automobile Curtiss
Histoire de la Voiture volante Qui n’a jamais rêvé de s’échapper des bouchons de circulation en s’envolant à bord de sa voiture volante? Les six concepts de la voiture volante Pour comprendre comment les voitures volantes ont cherché à conquérir le ciel, il faut tout d’abord connaître les différents concepts élaborés jusqu’à ce jour par des inventeurs qui ont bien souvent risqué leur vie dans cette aventure et même, pour certains, perdue. Les six concepts proposés ici vous permettront de mieux comprendre l’histoire palpitante des voitures volantes tout en vous présentant un aperçu de demain : 1. L’avion‐automobile dont les ailes sont repliées ou enlevées pour prendre la route : à la base, c’est un avion; 2. La voiture volante munie d’ailes repliables ou intégrées : à la base, c’est une voiture; 3. La voiture qui devient volante en s’intégrant de façon fixe ou amovible à une partie d’avion; 4. La voiture volante munie de turbines pour décoller et atterrir à la verticale; 5. La voiture volante munie d’hélices, à la manière d’un hélicoptère ou d’un autogire; 6. Le véhicule personnel aérien (PAV) (sans roue). 1917 : l’avion‐automobile Curtiss L’avion des frères Orville et Wilbur Wright venait à peine de quitter le tarmac en 1903 que déjà d’ingénieux inventeurs cherchaient à les faire rouler sur nos routes. Considéré comme étant le premier avion‐automobile inventé, l’avion automobile, créé par Glenn Curtiss en 1917, était un véhicule à 3 places (une place avant et deux places arrière) intégré à un avion triplan.