PRE-X EXPERIMENTAL RE-ENTRY LIFTING BODY: DESIGN of FLIGHT TEST EXPERIMENTS for CRITICAL AEROTHERMAL PHENOMENA Paolo Baiocco
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The New American Space Age: a Progress Report on Human Spaceflight the New American Space Age: a Progress Report on Human Spaceflight the International Space
The New American Space Age: A PROGRESS REPORT ON HUMAN SpaCEFLIGHT The New American Space Age: A Progress Report on Human Spaceflight The International Space Station: the largest international scientific and engineering achievement in human history. The New American Space Age: A Progress Report on Human Spaceflight Lately, it seems the public cannot get enough of space! The recent hit movie “Gravity” not only won 7 Academy Awards – it was a runaway box office success, no doubt inspiring young future scientists, engineers and mathematicians just as “2001: A Space Odyssey” did more than 40 years ago. “Cosmos,” a PBS series on the origins of the universe from the 1980s, has been updated to include the latest discoveries – and funded by a major television network in primetime. And let’s not forget the terrific online videos of science experiments from former International Space Station Commander Chris Hadfield that were viewed by millions of people online. Clearly, the American public is eager to carry the torch of space exploration again. Thankfully, NASA and the space industry are building a host of new vehicles that will do just that. American industry is hard at work developing new commercial transportation services to suborbital altitudes and even low Earth orbit. NASA and the space industry are also building vehicles to take astronauts beyond low Earth orbit for the first time since the Apollo program. Meanwhile, in the U.S. National Lab on the space station, unprecedented research in zero-g is paving the way for Earth breakthroughs in genetics, gerontology, new vaccines and much more. -

MIT Japan Program Working Paper 01.10 the GLOBAL COMMERCIAL
MIT Japan Program Working Paper 01.10 THE GLOBAL COMMERCIAL SPACE LAUNCH INDUSTRY: JAPAN IN COMPARATIVE PERSPECTIVE Saadia M. Pekkanen Assistant Professor Department of Political Science Middlebury College Middlebury, VT 05753 [email protected] I am grateful to Marco Caceres, Senior Analyst and Director of Space Studies, Teal Group Corporation; Mark Coleman, Chemical Propulsion Information Agency (CPIA), Johns Hopkins University; and Takashi Ishii, General Manager, Space Division, The Society of Japanese Aerospace Companies (SJAC), Tokyo, for providing basic information concerning launch vehicles. I also thank Richard Samuels and Robert Pekkanen for their encouragement and comments. Finally, I thank Kartik Raj for his excellent research assistance. Financial suppport for the Japan portion of this project was provided graciously through a Postdoctoral Fellowship at the Harvard Academy of International and Area Studies. MIT Japan Program Working Paper Series 01.10 Center for International Studies Massachusetts Institute of Technology Room E38-7th Floor Cambridge, MA 02139 Phone: 617-252-1483 Fax: 617-258-7432 Date of Publication: July 16, 2001 © MIT Japan Program Introduction Japan has been seriously attempting to break into the commercial space launch vehicles industry since at least the mid 1970s. Yet very little is known about this story, and about the politics and perceptions that are continuing to drive Japanese efforts despite many outright failures in the indigenization of the industry. This story, therefore, is important not just because of the widespread economic and technological merits of the space launch vehicles sector which are considerable. It is also important because it speaks directly to the ongoing debates about the Japanese developmental state and, contrary to the new wisdom in light of Japan's recession, the continuation of its high technology policy as a whole. -
Facing the Heat Barrier: a History of Hypersonics First Thoughts of Hypersonic Propulsion
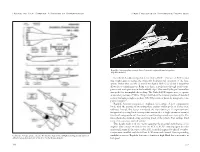
Facing the Heat Barrier: A History of Hypersonics First Thoughts of Hypersonic Propulsion Republic’s Aerospaceplane concept showed extensive engine-airframe integration. (Republic Aviation) For takeoff, Lockheed expected to use Turbo-LACE. This was a LACE variant that sought again to reduce the inherently hydrogen-rich operation of the basic system. Rather than cool the air until it was liquid, Turbo-Lace chilled it deeply but allowed it to remain gaseous. Being very dense, it could pass through a turbocom- pressor and reach pressures in the hundreds of psi. This saved hydrogen because less was needed to accomplish this cooling. The Turbo-LACE engines were to operate at chamber pressures of 200 to 250 psi, well below the internal pressure of standard rockets but high enough to produce 300,000 pounds of thrust by using turbocom- pressed oxygen.67 Republic Aviation continued to emphasize the scramjet. A new configuration broke with the practice of mounting these engines within pods, as if they were turbojets. Instead, this design introduced the important topic of engine-airframe integration by setting forth a concept that amounted to a single enormous scramjet fitted with wings and a tail. A conical forward fuselage served as an inlet spike. The inlets themselves formed a ring encircling much of the vehicle. Fuel tankage filled most of its capacious internal volume. This design study took two views regarding the potential performance of its engines. One concept avoided the use of LACE or ACES, assuming again that this craft could scram all the way to orbit. Still, it needed engines for takeoff so turbo- ramjets were installed, with both Pratt & Whitney and General Electric providing Lockheed’s Aerospaceplane concept. -

Lift and Drag Characteristics of the HL-10 Lifting Body During Subsonic
NASA TECHNICAL NOTE NASA TN D-6263 - _- e,.i KIRTLAkD AFB,N.M, LIFT AND DRAG CHARACTERISTICS . OF THE HL-IO LIFTING BODY DURING SUBSONIC GLIDING FLIGHT b . .. by Jon S. Pyle h Flight Research Center Edwards, Cali$ 93523 NATIONAL AERONAUTICS AND SPACE ADMINISTRATION WASHINGTON, 0. C. MARCH 1971 TECH LIBRARY KAFB, NM I111111 11111 11111 11111 /Ill/lllll1111111111111 0333074 1. Report No. 2. Government Accession No. 3. Recipient's Catalog No. NASA TN D-6263 I 4. Title and Subtitle 5. Report Date LIFT AND DRAG CHARACTERISTICS OF THE HL-10 LIFTING BODY March 1973 DURING SUBSONIC GLIDING FLIGHT 6. Performing Organization Code 7. Author(s) 8. Performing Organization Report No. Jon S. Pyle H-608 10. Work Unit No. 727-00-00-01-24 ?- 9. Performing Organization Name and Address NASA Flight Research Center 11. Contract or Grant No. P. 0. Box 273 Edwards, California 93523 d 13. Type of Report and Period Covered 112. Sponsoring Agency Name and Address Technical Note National Aeronautics and Space Administration 14. Sponsoring Agency Code Washington, D. C. 20546 15. Supplementary Notes 16. Abstract Subsonic lift and drag data obtained during the HL-10 lifting body glide flight program are presented for four configurations for angles of attack from 5" to 26" and Mach numbers from 0.35 to 0. 62. These flight data, where applicable, are compared with results from small-scale wind-tunnel tests of an HL-10 model, full-scale wind-tunnel results obtained with the flight vehicle, and flight results for the M2-F2 lifting body. The lift and drag characteristics obtained from the HL-10 flight results showed that a severe flow problem existed on the upper surface of the vehicle during the first flight test. -

Preliminary Design of Winged Experimental Rocket by University Consortium
Trans. JSASS Space Tech. Japan Vol. 7, No. ists26, pp. Tg_21-Tg_26, 2009 Preliminary Design of Winged Experimental Rocket by University Consortium By Masashi WAKITA 1) , Koichi YONEMOTO 1) , Tomoki AKIYAMA 1) , Shigeru ASO 2) , Yuji KOHSETSU 2) , and Harunori NAGATA 3) 1) Department of Mechanical and Control Engineering, Kyushu Institute of Technology, Fukuoka, Japan 2) Department of Aeronautics and Astronautics, Kyushu University, Fukuoka, Japan 3) Graduate School of Engineering, Hokkaido University, Hokkaido, Japan (Received April 24th, 2008) The project of Winged Experimental Rocket described here is a proposal by the alliance of universities (University Consortium) expanding and integrating the research activities of reusable space transportation system performed by individual universities, and is the proposal that aims at flight proof of the results of advanced research conducted by the universities and JAXA using the university-centered experimental launch systems. This paper verifies the validity of the winged experimental rocket by surveying the technical issues that should be demonstrated and by estimating the airframe scale, weight and finally the total cost. The development schedule of this project was set to five years, where two airframes of different scales will be developed to minimize the risks. A 1.5-meter-long airframe will be first manufactured and conduct flight tests in the third year to verify the design issues. Then, a 2.5-meter-long airframe will be finally developed and conduct a complete flight demonstration of various research issues in the fifth year. Key Words: Winged Rocket, University Consortium 1. Introduction or the alliance of universities (University Consortium) and institutes to break down such a stagnation feeling after the Based on the long term vision of expanding ideal freeze of HOPE-X project. -

Velivoli Ipersonici”
GRUPPO DI LAVORO “VELIVOLI IPERSONICI” FRAMEWORK Gruppo di Lavoro “Velivoli Ipersonici” Chairman: Gen. B.A. (r) Giuseppe Cornacchia, CESMA Framework (WP 1.0) Coordinatori: Ing. Ludovico Vecchione/Ing. Sara Di Benedetto, Centro Italiano Ricerche Aerospaziali (CIRA) 1 GRUPPO DI LAVORO “VELIVOLI IPERSONICI” FRAMEWORK Indice Work Breakdown Structure ..................................................................................................... 3 1 Introduzione ...................................................................................................................... 4 2 Tassonomia ....................................................................................................................... 4 3 Mappatura delle iniziative europee .................................................................................. 4 3.1 European eXPErimental Re-entry Test-bed (EXPERT) ......................................................... 5 3.2 Intermediate eXperimental Vehicle (IXV) ......................................................................... 6 3.3 PRIDE ............................................................................................................................ 7 3.4 Long-Term Advanced Propulsion Concepts and Technologies (LAPCAT-II) ............................ 8 3.5 Future High-Altitude High-Speed Transport 20XX (FAST20XX) ............................................ 9 3.6 High-Speed Experimental Fly Vehicles – International (HEXAFLY-INT) ............................... 10 4 Iniziative nazionali in Europa -

Design Evolution and AHP-Based Historiography of Lifting Reentry Vehicle Space Programs
AIAA 2016-5319 AIAA SPACE Forum 13 - 16 September 2016, Long Beach, California AIAA SPACE 2016 Design Evolution and AHP-based Historiography of Lifting Reentry Vehicle Space Programs Loveneesh Rana∗ and Bernd Chudoba y University of Texas at Arlington, TX-76019-0018 The term \Historiography" is defined as the writing of history based on the critical examination of sources. In the context of space access systems, a considerable body of lit- erature has been published addressing the history of lifting-reentry vehicle(LRV) research. Many technical papers and books have surveyed legacy research case studies, technology development projects and vehicle development programs to document the evolution of hy- personic vehicle design knowledge gained from the early 1950s onwards. However, these accounts tend to be subjective and qualitative in their discussion of the significance and level of progress made. Even though the information addressed in these surveys is consid- ered crucial, it may lack qualitative or quantitative organization for consistently measuring the contribution of an individual program. The goal of this study is to provide an anatomy aimed at addressing and quantifying the contribution of legacy programs towards the evolution of the hypersonic knowledge base. This paper applies quantified analysis to legacy lifting-reentry vehicle programs, aimed at comprehensively capturing the evolution of LRV hypersonic knowledge base. Beginning with an overview of literature surveys focusing on hypersonic research programs, a com- prehensive list of LRV programs, starting from the 1933 Silvervogel to the 2015 Dream Chaser, is assembled. These case-studies are assessed on the basis of contribution made towards major hypersonic disciplines. -

International Space Station Crew Return Vehicle: X-38
Educational Product National Aeronautics and Educators Grades 5–8 Space Administration EB-1998-11-127-HQ Educational Brief International Space Station Crew Return Vehicle: X-38 The International Space Station (ISS) will provide the world with an orbiting laboratory that will have long-duration micro- gravity experimentation capability. The crew size for this facility will depend upon the crew return capability. The first crews will consist of three astronauts from Russia and the United States. The crew is limited to three because the Russian Soyuz vehicle that will remain docked to the ISS can only hold three people. It is imperative that the crew members be able to return to Earth if there is a medical emergency or if other complications arise. In development at this time is a Crew Return Vehicle that will be able to hold up to seven crew members. This will allow the full complement of seven astronauts to live and work onboard the ISS. The Crew Return Vehicle, or X-38, uses a lifting body concept originally developed by the U.S. Air Force in the mid-1960s. These wingless lifting bodies attain aerodynamic stability and lift from the shape of the aircraft. Lift results from more air pressure on the bottom of the body than on the top. Following the jettison of a deorbit engine, the X-38 will glide from orbit and use a steerable, parafoil parachute for its final descent to landing. The high speeds at which lifting body aircraft operate make it dangerous to land. The parafoil is used to slow the vehicle down and make it safer. -

Wind Tunnels of the Eastern Hemisphere
WIND TUNNELS OF THE EASTERN HEMISPHERE A Report Prepared by the Federal Research Division, Library of Congress for the Aeronautics Research Mission Directorate, National Aeronautics and Space Administration August 2008 Researchers: Malinda Goodrich Jenele Gorham Wm. Noel Ivey Sarah Kim Marieke Lewis Carl Minkus Project Manager: Malinda K. Goodrich Federal Research Division Library of Congress Washington, D.C. 20540−4840 Tel: 202−707 −3900 Fax: 202−707 −3920 E-Mail: mailto:[email protected] Homepage: http://www.loc.gov/rr/frd/ p 60 Years of Service to the Federal Government p 1948 – 2008 Library of Congress – Federal Research Division Aeronautical Wind Tunnels Eastern Hemisphere PREFACE This catalog is a compilation of data on subsonic, supersonic, and hypersonic wind tunnels in the Eastern Hemisphere used for aeronautical testing. The countries represented in this catalog include those in Africa (South Africa), Asia (Australia, China, Indonesia, Japan, Malaysia, Singapore, and South Korea), Europe (Belgium, France, Germany, Italy, the Netherlands, Romania, Russia, Sweden, Ukraine, the United Kingdom), and the Middle East and Central and South Asia (India, Iran, Israel, Pakistan, Turkey). The catalog profiles 279 wind tunnels. A table, distribution chart, and bar charts following this preface depict the number and types of wind tunnels operating in each country. The bulk of the catalog is made up of data sheets for each facility, indicating the facility’s name; the name of the installation where it is located; its technical parameters, such as size, speed range, temperature range, pressure, operational status, and Reynolds number; its replacement and/or operating cost; its testing capabilities; current programs; planned improvements; contact information; and schematics, if available. -

Vysoké Učení Technické V Brně Brno University of Technology
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ BRNO UNIVERSITY OF TECHNOLOGY FAKULTA STROJNÍHO INŽENÝRSTVÍ LETECKÝ ÚSTAV FACULTY OF MECHANICAL ENGINEERING INSTITUTE OF AEROSPACE ENGINEERING PŘEHLED VÝVOJE KOSMICKÝCH RAKETOPLÁNŮ SURVEY OF THE SPACE ROCKETPLANES DEVELOPMENT BAKALÁŘSKÁ PRÁCE BACHELOR'S THESIS AUTOR PRÁCE TOMÁŠ KAPOUN AUTHOR VEDOUCÍ PRÁCE doc. Ing. VLADIMÍR DANĚK, CSc. SUPERVISOR BRNO 2013 Vysoké učení technické v Brně, Fakulta strojního inženýrství Letecký ústav Akademický rok: 2012/2013 ZADÁNÍ BAKALÁŘSKÉ PRÁCE student(ka): Tomáš Kapoun který/která studuje v bakalářském studijním programu obor: Strojní inženýrství (2301R016) Ředitel ústavu Vám v souladu se zákonem č.111/1998 o vysokých školách a se Studijním a zkušebním řádem VUT v Brně určuje následující téma bakalářské práce: Přehled vývoje kosmických raketoplánů v anglickém jazyce: Survey of the Space Rocketplanes Development Stručná charakteristika problematiky úkolu: Mnohonásobně použitelné kosmické dopravní prostředky se staly předmětem vývoje na počátku 70. let. Z mnoha koncepčních návrhů se ukázalo, že z ekonomických důvodů není doposud přijatelná varianta dvoustupňového kosmického dopravního systému. Řešení vedlo jen k částečně vícenásobně použitelnému kosmickému dopravnímu systému. Předmětem bakalářské práce by měl být historicko-technický přehled vývoje raketoplánů. Cíle bakalářské práce: Vypracujte historicko-technický přehled vývoje vícenásobně použitelných kosmických dopravních systémů založených na využívání aerodynamického principu návratu orbitálního stupně do hustých vrstev atmosféry a při přistání. Zpracujte přehled počátků vývoje suborbitálních raketoplánů a vztlakových těles. Technické a ekonomické problémy vývoje orbitálních raketoplánů a poznatky z jejich dosavadního provozu. Budoucnost využití vícenásobně použitelných kosmických dopravních systémů. Seznam odborné literatury: [1] MARTINEK,F. Z historie a současnosti kosmických raketoplánů. Vlašské Meziříčí: Hvězdárna Valašské Meziříčí, 1997. 144 s. ISBN 80-902445-2-1 [2] ISAKOWITZ, Steven J. -

Airframe Integration Trade Studies for a Reusable Launch Vehicle
Airframe Integration Trade Studies for a Reusable Launch Vehicle John T. Dorsey, Chauncey Wu, Kevin Rivers, Carl Martin, Russell Smith Thermal Structures Branch, NASA Langley Research Center, Hampton, VA 23681-0001 Abstract. Future launch vehicles must be lightweight, fully reusable and easily maintained if low-cost access to space is to be achieved. The goal of achieving an economically viable Single-Stage-to-Orbit (SSTO) Reusable Launch Vehicle (RLV) is not easily achieved and success will depend to a large extent on having an integrated and optimized total system. A series of trade studies were performed to meet three objectives. First, to provide structural weights and parametric weight equations as inputs to configuration-level trade studies. Second, to identify, assess and quantify major weight drivers for the RLV airframe. Third, using information on major weight drivers, and considering the RLV as an integrated thermal structure (composed of thrust structures, tanks, thermal protection system, insulation and control surfaces), identify and assess new and innovative approaches or concepts that have the potential for either reducing airframe weight, improving operability, and/or reducing cost. INTRODUCTION Future launch vehicles must be lightweight, fully reusable and easily maintained if low-cost access to space is to be achieved. The Reusable Launch Vehicle Program (RLV) is a joint venture between NASA and Lockheed-Martin to develop the enabling technologies for such a vehicle. The proposed Lockheed-Martin VentureStarª, shown in Figure 1, has a goal of reducing the cost of placing payloads into orbit by an order of magnitude (Cook, 1996). The Lockheed-Martin RLV configuration baseline is a lifting body with aerospike engines mounted aft. -

Active Thermal Control System Radiators for the Dream Chaser Cargo System
48th International Conference on Environmental Systems ICES-2018-121 8-12 July 2018, Albuquerque, New Mexico Active Thermal Control System Radiators for the Dream Chaser Cargo System Norman Hahn1 Paragon Space Development Corporation, Golden, Colorado 80401 Cheryl Perich2 Sierra Nevada Corporation, Louisville, Colorado, 80027 Sierra Nevada Corporation is under contract with NASA to resupply the International Space Station starting in 2020 using the Dream Chaser® spacecraft. One of the primary subsystems of this spacecraft is the Active Thermal Control System (ATCS), which maintains all spacecraft components and subsystems within their required temperature limits through heat collection, transportation and rejection processes. A primary means of heat rejection is radiation to space via the active thermal control radiators produced by Paragon Space Development Corporation. This paper provides an overview of the Dream Chaser ATCS and details the design of the radiators. The sizing of the radiator surface area and fluid flow paths will be discussed along with the challenges associated with integrating the radiator panels onto the Dream Chaser Cargo Module. Finally, the manufacturing processes required to produce the radiators will be examined. Nomenclature ATCS = Active Thermal Control System CM = Cargo Module CRS2 = Commercial Resupply Service 2 D = tube diameter FSW = Friction Stir Weld ISS = International Space Station L = tube length LHS = Left Hand Side = mass flow rate MMOD = Micrometeoroid and Orbital Debris NASA = National Aeronautics and Space Administration PGW = Propylene Glycol and Water SNC = Sierra Nevada Corporation µ = fluid viscosity ρ = fluid density I. Introduction IERRA Nevada Corporation’s (SNC) Dream Chaser Cargo System provides the National Aeronautics and Space S Administration (NASA) with the capability to safely and efficiently transport cargo to and from the International Space Station (ISS) under the Commercial Resupply Service 2 (CRS2) program.