Lift and Drag Characteristics of the HL-10 Lifting Body During Subsonic
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The New American Space Age: a Progress Report on Human Spaceflight the New American Space Age: a Progress Report on Human Spaceflight the International Space
The New American Space Age: A PROGRESS REPORT ON HUMAN SpaCEFLIGHT The New American Space Age: A Progress Report on Human Spaceflight The International Space Station: the largest international scientific and engineering achievement in human history. The New American Space Age: A Progress Report on Human Spaceflight Lately, it seems the public cannot get enough of space! The recent hit movie “Gravity” not only won 7 Academy Awards – it was a runaway box office success, no doubt inspiring young future scientists, engineers and mathematicians just as “2001: A Space Odyssey” did more than 40 years ago. “Cosmos,” a PBS series on the origins of the universe from the 1980s, has been updated to include the latest discoveries – and funded by a major television network in primetime. And let’s not forget the terrific online videos of science experiments from former International Space Station Commander Chris Hadfield that were viewed by millions of people online. Clearly, the American public is eager to carry the torch of space exploration again. Thankfully, NASA and the space industry are building a host of new vehicles that will do just that. American industry is hard at work developing new commercial transportation services to suborbital altitudes and even low Earth orbit. NASA and the space industry are also building vehicles to take astronauts beyond low Earth orbit for the first time since the Apollo program. Meanwhile, in the U.S. National Lab on the space station, unprecedented research in zero-g is paving the way for Earth breakthroughs in genetics, gerontology, new vaccines and much more. -
Facing the Heat Barrier: a History of Hypersonics First Thoughts of Hypersonic Propulsion
Facing the Heat Barrier: A History of Hypersonics First Thoughts of Hypersonic Propulsion Republic’s Aerospaceplane concept showed extensive engine-airframe integration. (Republic Aviation) For takeoff, Lockheed expected to use Turbo-LACE. This was a LACE variant that sought again to reduce the inherently hydrogen-rich operation of the basic system. Rather than cool the air until it was liquid, Turbo-Lace chilled it deeply but allowed it to remain gaseous. Being very dense, it could pass through a turbocom- pressor and reach pressures in the hundreds of psi. This saved hydrogen because less was needed to accomplish this cooling. The Turbo-LACE engines were to operate at chamber pressures of 200 to 250 psi, well below the internal pressure of standard rockets but high enough to produce 300,000 pounds of thrust by using turbocom- pressed oxygen.67 Republic Aviation continued to emphasize the scramjet. A new configuration broke with the practice of mounting these engines within pods, as if they were turbojets. Instead, this design introduced the important topic of engine-airframe integration by setting forth a concept that amounted to a single enormous scramjet fitted with wings and a tail. A conical forward fuselage served as an inlet spike. The inlets themselves formed a ring encircling much of the vehicle. Fuel tankage filled most of its capacious internal volume. This design study took two views regarding the potential performance of its engines. One concept avoided the use of LACE or ACES, assuming again that this craft could scram all the way to orbit. Still, it needed engines for takeoff so turbo- ramjets were installed, with both Pratt & Whitney and General Electric providing Lockheed’s Aerospaceplane concept. -

PRE-X EXPERIMENTAL RE-ENTRY LIFTING BODY: DESIGN of FLIGHT TEST EXPERIMENTS for CRITICAL AEROTHERMAL PHENOMENA Paolo Baiocco
PRE-X EXPERIMENTAL RE-ENTRY LIFTING BODY: DESIGN OF FLIGHT TEST EXPERIMENTS FOR CRITICAL AEROTHERMAL PHENOMENA Paolo Baiocco * * CNES Direction des Lanceurs Rond Point de l’Espace – 91023 Evry Cedex, France Phone : +33 (0)1.60.87.72.14 Fax : +33 (0)1.60.87.72.66 E-mail : [email protected] ABSTRACT Atmospheric glided re-entry is one of the main key technologies for future space vehicle applications. In this frame Pre-X is the CNES proposal to perform in-flight experimentation mainly on reusable thermal protections, aero-thermo-dynamics and guidance to secure the second generation of re-entry X vehicles. This paper describes the system principles and main aerothermodynamic experiences currently foreseen on board the vehicle. A preliminary in-flight experimentation and measurement plan has been assessed defining the main objectives in terms of reusable Thermal Protection System (TPS) and Aero Thermo Dynamics (ATD) data on the most critical phenomena. This flight aims also to take the opportunity to fly some innovative measurements. A complete system loop has been performed including the operations, ground system assessment, and visibility analysis. The vehicle re-entry point is at 120 km and the mission objectives are fulfilled between Mach 25 and 5. Then the vehicle has to pass to subsonic speeds, the parachute opens and it is finally recovered in the sea. The VEGA and DNEPR launch vehicles are compatible of the Pre-X experimental vehicle. ACRONYMS ACS Attitude Control System AEDB Aero Dynamic Data Base AoA Angle of Attack ARD Atmospheric Re-entry Demonstrator ATD Aero Termo Dynamics ATDB Aero Termodynamic Data Base CDG Centre of Gravity CFA Continuum Flow Aerodynamics CFD Computational Fluid Dynamics CMC Ceramic Matrix Composite C/SiC Carbon / Silicon Carbide FCS Flight Control System FEI Flexible External Insulation GNC Guidance Navigation and Control LTT Laminar to Turbulent Transition LV Launch Vehicle RCS Reaction Control System SEL Electrical System Baiocco, P. -

International Space Station Crew Return Vehicle: X-38
Educational Product National Aeronautics and Educators Grades 5–8 Space Administration EB-1998-11-127-HQ Educational Brief International Space Station Crew Return Vehicle: X-38 The International Space Station (ISS) will provide the world with an orbiting laboratory that will have long-duration micro- gravity experimentation capability. The crew size for this facility will depend upon the crew return capability. The first crews will consist of three astronauts from Russia and the United States. The crew is limited to three because the Russian Soyuz vehicle that will remain docked to the ISS can only hold three people. It is imperative that the crew members be able to return to Earth if there is a medical emergency or if other complications arise. In development at this time is a Crew Return Vehicle that will be able to hold up to seven crew members. This will allow the full complement of seven astronauts to live and work onboard the ISS. The Crew Return Vehicle, or X-38, uses a lifting body concept originally developed by the U.S. Air Force in the mid-1960s. These wingless lifting bodies attain aerodynamic stability and lift from the shape of the aircraft. Lift results from more air pressure on the bottom of the body than on the top. Following the jettison of a deorbit engine, the X-38 will glide from orbit and use a steerable, parafoil parachute for its final descent to landing. The high speeds at which lifting body aircraft operate make it dangerous to land. The parafoil is used to slow the vehicle down and make it safer. -

Airframe Integration Trade Studies for a Reusable Launch Vehicle
Airframe Integration Trade Studies for a Reusable Launch Vehicle John T. Dorsey, Chauncey Wu, Kevin Rivers, Carl Martin, Russell Smith Thermal Structures Branch, NASA Langley Research Center, Hampton, VA 23681-0001 Abstract. Future launch vehicles must be lightweight, fully reusable and easily maintained if low-cost access to space is to be achieved. The goal of achieving an economically viable Single-Stage-to-Orbit (SSTO) Reusable Launch Vehicle (RLV) is not easily achieved and success will depend to a large extent on having an integrated and optimized total system. A series of trade studies were performed to meet three objectives. First, to provide structural weights and parametric weight equations as inputs to configuration-level trade studies. Second, to identify, assess and quantify major weight drivers for the RLV airframe. Third, using information on major weight drivers, and considering the RLV as an integrated thermal structure (composed of thrust structures, tanks, thermal protection system, insulation and control surfaces), identify and assess new and innovative approaches or concepts that have the potential for either reducing airframe weight, improving operability, and/or reducing cost. INTRODUCTION Future launch vehicles must be lightweight, fully reusable and easily maintained if low-cost access to space is to be achieved. The Reusable Launch Vehicle Program (RLV) is a joint venture between NASA and Lockheed-Martin to develop the enabling technologies for such a vehicle. The proposed Lockheed-Martin VentureStarª, shown in Figure 1, has a goal of reducing the cost of placing payloads into orbit by an order of magnitude (Cook, 1996). The Lockheed-Martin RLV configuration baseline is a lifting body with aerospike engines mounted aft. -

Active Thermal Control System Radiators for the Dream Chaser Cargo System
48th International Conference on Environmental Systems ICES-2018-121 8-12 July 2018, Albuquerque, New Mexico Active Thermal Control System Radiators for the Dream Chaser Cargo System Norman Hahn1 Paragon Space Development Corporation, Golden, Colorado 80401 Cheryl Perich2 Sierra Nevada Corporation, Louisville, Colorado, 80027 Sierra Nevada Corporation is under contract with NASA to resupply the International Space Station starting in 2020 using the Dream Chaser® spacecraft. One of the primary subsystems of this spacecraft is the Active Thermal Control System (ATCS), which maintains all spacecraft components and subsystems within their required temperature limits through heat collection, transportation and rejection processes. A primary means of heat rejection is radiation to space via the active thermal control radiators produced by Paragon Space Development Corporation. This paper provides an overview of the Dream Chaser ATCS and details the design of the radiators. The sizing of the radiator surface area and fluid flow paths will be discussed along with the challenges associated with integrating the radiator panels onto the Dream Chaser Cargo Module. Finally, the manufacturing processes required to produce the radiators will be examined. Nomenclature ATCS = Active Thermal Control System CM = Cargo Module CRS2 = Commercial Resupply Service 2 D = tube diameter FSW = Friction Stir Weld ISS = International Space Station L = tube length LHS = Left Hand Side = mass flow rate MMOD = Micrometeoroid and Orbital Debris NASA = National Aeronautics and Space Administration PGW = Propylene Glycol and Water SNC = Sierra Nevada Corporation µ = fluid viscosity ρ = fluid density I. Introduction IERRA Nevada Corporation’s (SNC) Dream Chaser Cargo System provides the National Aeronautics and Space S Administration (NASA) with the capability to safely and efficiently transport cargo to and from the International Space Station (ISS) under the Commercial Resupply Service 2 (CRS2) program. -

Theotherguysnasa Needs a Space Taxi. the Likely Pick Is Spacex
NASA needs a space taxi. The likely pick is SpaceX — but don’t count out this Colorado company. The Other Guys BY MICHAEL BEHAR STANDING BESIDE Dream Chaser, for our nation. It’s the opportunity to get the United States back into launching it’s hard to ignore its resemblance humans into space.” to the space shuttle. It’s smaller— Voss showed me around the bay where Sierra Nevada is constructing Dream only 30 feet long from nose to Chaser, a seven-passenger reusable space- tail—and the wings are upswept plane that, if it is selected by NASA, would be carried to space atop an Atlas V rocket. and canted. But in overall shape, After decoupling from its launch vehicle, Dream Chaser would ignite its engines the kinship is clear. Still, the com- to reach its final destination. It’s capable pany building this vehicle says of docking with the ISS, or performing a variety of multi-day missions in low Earth it is not trying to make Shuttle orbit, then returning home in a glide to a 2.0. “We’re not fixing all the shut- runway landing. While Dream Chaser is based on a long-established aerodynamic tle’s problems,” avows Jim Voss, concept called a lifting body, it incorporates the avuncular vice president of numerous innovations never before used Opposite: Vying for the job of frst commercial astronaut hauler, Dream Chaser got on a manned orbital vehicle, including put through its aerodynamic paces last year when its maker, Sierra Nevada, dangled Sierra Nevada Corporation’s Space hybrid-fueled engines and a carbon-fiber it from an Erickson Air-Crane helicopter over Jeferson County, Colorado. -

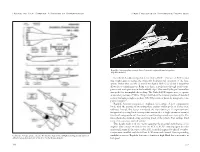
Developing and Flight Testing the HL-IO Lifting.- ..Body: a Precursor to the Space Shuttle
//V-o NASA _rence .t Publication 1332 April 1994 • Developing and Flight Testing the HL-IO Lifting.- ..Body: A Precursor to the Space Shuttle Robert W. Kempel, Weneth D. Painter, and Milton O. Thompson fr z (NASA-RP-1332) DEVELOPING ANO N94-34703 FLIGHT TESTING THE HL-IO LI_TING BODY: A PRECURSOR TO THE SPACE SHUTTLE (NASA. Dryden Flight Unclas ! Research Facility) 56 p HI/05 0008486 m . -__ ------; 2 | | m . m T • • " . • • r - . u . i NASA Reference Publication 1332 1994 Developing and Flight Testing the HL- 10 Lifting Body: A Precursor to the Space Shuttle Robert W. Kempel PRC Inc., Edwards, California Weneth D. Painter National Test Pilot School, Mojave, California Milton O. Thompson Dryden Flight Research Center Edwards, California National Aeronautics and Space Administration Office of Management Scientific and Technical Information Program _-! CONTENTS ABSTRACT NOMENCLATURE INTRODUCTION 1 Lifting-Body Concept .......................................................... • .......... 2 Brief Area Description and Some History .................................................... 4 GETTING STARTED 5 CONFIGURING THE HL-10 7 Concept and Early Configuration ........................................................... 7 Final Configuration ..................................................................... 10 FLIGHT VEHICLE DESCRIPTION 13 FLIGHT VEHICLE MISSION 17 FLIGHT TEST PREPARATION 19 M2-F2 Team .......................................................................... 20 HL- 10 Team ......................................................................... -

Shape Design of Lifting Body Based on Genetic Algorithm
I.J. Information Engineering and Electronic Business, 2010, 1, 37-43 Published Online November 2010 in MECS (http://www.mecs-press.org/) Shape Design of Lifting body Based on Genetic Algorithm Yongyuan Li, Yi Jiang Beijing Institute of Technology, Beijing, China Email: lyy6912 @yeah.net Chunping Huang R&D Centre, China Academy of Launch Vehicle Technology,Beijing , China Email: [email protected] Abstract—This paper briefly introduces the concept and history of lifting body, and puts forward a new method for the optimization of lifting body. This method has drawn lessons from the die line design of airplane is used to parametric numerical modeling for the lifting body, and extract the characterization of shape parameters as design variables, a combination of lifting body reentry vehicle aerodynamic conditions, aerodynamic heating, volumetric Rate and the stability of performance. Multi-objective hybrid genetic algorithm is adopted to complete the aerodynamic shape optimization and design of hypersonic lifting body vehicle when under more variable and constrained condition in order to obtain the Pareto optimal solution of Common Aero Vehicle shape. Index Terms—Lifting Body; Multi-objective Genetic Algorithm; Optimization Design I. INTRODUCTION In the early 1950s, the concept of lifting body reentry from suborbital or orbital space flight evolved at National Advisory Committee for Aeronautics (NACA) Ames Aeronautical Laboratory, Moffett Field, California, by two imaginative engineers, Allen and Alfred Eggers. The Fig.1 The space shuttle and X-38 of US initial work was accomplished in connection with the reentry survival of ballistic missile nose cones1. Mr. Allen found that by blunting the nose of a missile, the reentry energy would be more rapidly dissipated through the large shock wave while a sharp nosed missile would absorb more energy, in the form of heat, through skin friction. -

Concepts of Operations for a Reusable Launch Vehicle
Concepts of Operations for a Reusable Launch Vehicle MICHAEL A. RAMPINO, Major, USAF School of Advanced Airpower Studies THESIS PRESENTED TO THE FACULTY OF THE SCHOOL OF ADVANCED AIRPOWER STUDIES, MAXWELL AIR FORCE BASE, ALABAMA, FOR COMPLETION OF GRADUATION REQUIREMENTS, ACADEMIC YEAR 1995–96. Air University Press Maxwell Air Force Base, Alabama September 1997 Disclaimer Opinions, conclusions, and recommendations expressed or implied within are solely those of the author(s), and do not necessarily represent the views of Air University, the United States Air Force, the Department of Defense, or any other US government agency. Cleared for public release: Distribution unlimited. ii Contents Chapter Page DISCLAIMER . ii ABSTRACT . v ABOUT THE AUTHOR . vii ACKNOWLEDGMENTS . ix 1 INTRODUCTION . 1 2 RLV CONCEPTS AND ATTRIBUTES . 7 3 CONCEPTS OF OPERATIONS . 19 4 ANALYSIS . 29 5 CONCLUSIONS . 43 BIBLIOGRAPHY . 49 Illustrations Figure 1 Current RLV Concepts . 10 2 Cumulative 2,000-Pound Weapons Delivery within Three Days . 32 Table 1 Attributes of Proposed RLV Concepts and One Popular TAV Concept . 9 2 Summary of Attributes of a Notional RLV . 15 3 CONOPS A and B RLV Capabilities . 19 4 Cumulative 2,000-Pound Weapons Delivery within Three Days . 32 5 Summary of Analysis . 47 iii Abstract The United States is embarked on a journey toward maturity as a spacefaring nation. One key step along the way is development of a reusable launch vehicle (RLV). The most recent National Space Transportation Policy (August 1994) assigned improvement and evolution of current expendable launch vehicles to the Department of Defense while National Aeronautical Space Administration (NASA) is responsible for working with industry on demonstrating RLV technology. -

Round Trip to Orbit: Human Spaceflight Alternatives
Round Trip to Orbit: Human Spaceflight Alternatives August 1989 NTIS order #PB89-224661 Recommended Citation: U.S. Congress, Office of Technology Assessment, Round Trip to Orbit: Human Spaceflight Alternatives Special Report, OTA-ISC-419 (Washington, DC: U.S. Government Printing Office, August 1989). Library of Congress Catalog Card Number 89-600744 For sale by the Superintendent of Documents U.S. Government Printing Office, Washington, DC 20402-9325 (order form can be found in the back of this special report) Foreword In the 20 years since the first Apollo moon landing, the Nation has moved well beyond the Saturn 5 expendable launch vehicle that put men on the moon. First launched in 1981, the Space Shuttle, the world’s first partially reusable launch system, has made possible an array of space achievements, including the recovery and repair of ailing satellites, and shirtsleeve research in Spacelab. However, the tragic loss of the orbiter Challenger and its crew three and a half years ago reminded us that space travel also carries with it a high element of risk-both to spacecraft and to people. Continued human exploration and exploitation of space will depend on a fleet of versatile and reliable launch vehicles. As this special report points out, the United States can look forward to continued improvements in safety, reliability, and performance of the Shuttle system. Yet, early in the next century, the Nation will need a replacement for the Shuttle. To prepare for that eventuality, NASA and the Air Force have begun to explore the potential for advanced launch systems, such as the Advanced Manned Launch System and the National Aerospace Plane, which could revolutionize human access to space. -

Abstract Keywords Abbreviations
A review of design issues specific to hypersonic flight vehicles (30/03/2016) D. Sziroczak, PhD, Cranfield University H. Smith, Professor, Cranfield University Abstract This paper provides an overview of the current technical issues and challenges associated with the design of hypersonic vehicles. Two distinct classes of vehicles are reviewed; Hypersonic Transports and Space Launchers, their common features and differences are examined. After a brief historical overview, the paper takes a multi- disciplinary approach to these vehicles, discusses various design aspects, and technical challenges. Operational issues are explored, including mission profiles, current and predicted markets, in addition to environmental effects and human factors. Technological issues are also reviewed, focusing on the three major challenge areas associated with these vehicles: aerothermodynamics, propulsion, and structures. In addition, matters of reliability and maintainability are also presented. The paper also reviews the certification and flight testing of these vehicles from a global perspective. Finally the current stakeholders in the field of hypersonic flight are presented, summarizing the active programs and promising concepts. Keywords Hypersonic Transport, Space Launcher, Design review Abbreviations AETB: Alumina Enhanced Thermal Barrier AFRSI: Advanced Flexible Reusable Surface Insulation AOA: Angle of Attack CFD: Computational Fluid Dynamics CG: Centre of Gravity EASA: European Aviation Safety Agency EMU: Extravehicular Mobility Unit ESA: