Standing Waves Physics Lab I
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Experiment in High-Frequency Sediment Acoustics: SAX99
An Experiment in High-Frequency Sediment Acoustics: SAX99 Eric I. Thorsos1, Kevin L. Williams1, Darrell R. Jackson1, Michael D. Richardson2, Kevin B. Briggs2, and Dajun Tang1 1 Applied Physics Laboratory, University of Washington, 1013 NE 40th St, Seattle, WA 98105, USA [email protected], [email protected], [email protected], [email protected] 2 Marine Geosciences Division, Naval Research Laboratory, Stennis Space Center, MS 39529, USA [email protected], [email protected] Abstract A major high-frequency sediment acoustics experiment was conducted in shallow waters of the northeastern Gulf of Mexico. The experiment addressed high-frequency acoustic backscattering from the seafloor, acoustic penetration into the seafloor, and acoustic propagation within the seafloor. Extensive in situ measurements were made of the sediment geophysical properties and of the biological and hydrodynamic processes affecting the environment. An overview is given of the measurement program. Initial results from APL-UW acoustic measurements and modelling are then described. 1. Introduction “SAX99” (for sediment acoustics experiment - 1999) was conducted in the fall of 1999 at a site 2 km offshore of the Florida Panhandle and involved investigators from many institutions [1,2]. SAX99 was focused on measurements and modelling of high-frequency sediment acoustics and therefore required detailed environmental characterisation. Acoustic measurements included backscattering from the seafloor, penetration into the seafloor, and propagation within the seafloor at frequencies chiefly in the 10-300 kHz range [1]. Acoustic backscattering and penetration measurements were made both above and below the critical grazing angle, about 30° for the sand seafloor at the SAX99 site. -
Experiment 12
Experiment 12 Velocity and Propagation of Waves 12.1 Objective To use the phenomenon of resonance to determine the velocity of the propagation of waves in taut strings and wires. 12.2 Discussion Any medium under tension or stress has the following property: disturbances, motions of the matter of which the medium consists, are propagated through the medium. When the disturbances are periodic, they are called waves, and when the disturbances are simple harmonic, the waves are sinusoidal and are characterized by a common wavelength and frequency. The velocity of propagation of a disturbance, whether or not it is periodic, depends generally upon the tension or stress in the medium and on the density of the medium. The greater the stress: the greater the velocity; and the greater the density: the smaller the velocity. In the case of a taut string or wire, the velocity v depends upon the tension T in the string or wire and the mass per unit length µ of the string or wire. Theory predicts that the relation should be T v2 = (12.1) µ Most disturbances travel so rapidly that a direct determination of their velocity is not possible. However, when the disturbance is simple harmonic, the sinusoidal character of the waves provides a simple method by which the velocity of the waves can be indirectly determined. This determination involves the frequency f and wavelength λ of the wave. Here f is the frequency of the simple harmonic motion of the medium and λ is from any point of the wave to the next point of the same phase. -

Chapter 5 Waves I: Generalities, Superposition & Standing Waves
Chapter 5 Waves I: Generalities, Superposition & Standing Waves 5.1 The Important Stuff 5.1.1 Wave Motion Wave motion occurs when the mass elements of a medium such as a taut string or the surface of a liquid make relatively small oscillatory motions but collectively give a pattern which travels for long distances. This kind of motion also includes the phenomenon of sound, where the molecules in the air around us make small oscillations but collectively give a disturbance which can travel the length of a college classroom, all the way to the students dozing in the back. We can even view the up–and–down motion of inebriated spectators of sports events as wave motion, since their small individual motions give rise to a disturbance which travels around a stadium. The mathematics of wave motion also has application to electromagnetic waves (including visible light), though the physical origin of those traveling disturbances is quite different from the mechanical waves we study in this chapter; so we will hold off on studying electromagnetic waves until we study electricity and magnetism in the second semester of our physics course. Obviously, wave motion is of great importance in physics and engineering. 5.1.2 Types of Waves In some types of wave motion the motion of the elements of the medium is (for the most part) perpendicular to the motion of the traveling disturbance. This is true for waves on a string and for the people–wave which travels around a stadium. Such a wave is called a transverse wave. This type of wave is the easiest to visualize. -

AN INTRODUCTION to MUSIC THEORY Revision A
AN INTRODUCTION TO MUSIC THEORY Revision A By Tom Irvine Email: [email protected] July 4, 2002 ________________________________________________________________________ Historical Background Pythagoras of Samos was a Greek philosopher and mathematician, who lived from approximately 560 to 480 BC. Pythagoras and his followers believed that all relations could be reduced to numerical relations. This conclusion stemmed from observations in music, mathematics, and astronomy. Pythagoras studied the sound produced by vibrating strings. He subjected two strings to equal tension. He then divided one string exactly in half. When he plucked each string, he discovered that the shorter string produced a pitch which was one octave higher than the longer string. A one-octave separation occurs when the higher frequency is twice the lower frequency. German scientist Hermann Helmholtz (1821-1894) made further contributions to music theory. Helmholtz wrote “On the Sensations of Tone” to establish the scientific basis of musical theory. Natural Frequencies of Strings A note played on a string has a fundamental frequency, which is its lowest natural frequency. The note also has overtones at consecutive integer multiples of its fundamental frequency. Plucking a string thus excites a number of tones. Ratios The theories of Pythagoras and Helmholz depend on the frequency ratios shown in Table 1. Table 1. Standard Frequency Ratios Ratio Name 1:1 Unison 1:2 Octave 1:3 Twelfth 2:3 Fifth 3:4 Fourth 4:5 Major Third 3:5 Major Sixth 5:6 Minor Third 5:8 Minor Sixth 1 These ratios apply both to a fundamental frequency and its overtones, as well as to relationship between separate keys. -

The Emergence of Low Frequency Active Acoustics As a Critical
Low-Frequency Acoustics as an Antisubmarine Warfare Technology GORDON D. TYLER, JR. THE EMERGENCE OF LOW–FREQUENCY ACTIVE ACOUSTICS AS A CRITICAL ANTISUBMARINE WARFARE TECHNOLOGY For the three decades following World War II, the United States realized unparalleled success in strategic and tactical antisubmarine warfare operations by exploiting the high acoustic source levels of Soviet submarines to achieve long detection ranges. The emergence of the quiet Soviet submarine in the 1980s mandated that new and revolutionary approaches to submarine detection be developed if the United States was to continue to achieve its traditional antisubmarine warfare effectiveness. Since it is immune to sound-quieting efforts, low-frequency active acoustics has been proposed as a replacement for traditional passive acoustic sensor systems. The underlying science and physics behind this technology are currently being investigated as part of an urgent U.S. Navy initiative, but the United States and its NATO allies have already begun development programs for fielding sonars using low-frequency active acoustics. Although these first systems have yet to become operational in deep water, research is also under way to apply this technology to Third World shallow-water areas and to anticipate potential countermeasures that an adversary may develop. HISTORICAL PERSPECTIVE The nature of naval warfare changed dramatically capability of their submarine forces, and both countries following the conclusion of World War II when, in Jan- have come to regard these submarines as principal com- uary 1955, the USS Nautilus sent the message, “Under ponents of their tactical naval forces, as well as their way on nuclear power,” while running submerged from strategic arsenals. -

Fundamentals of Duct Acoustics
Fundamentals of Duct Acoustics Sjoerd W. Rienstra Technische Universiteit Eindhoven 16 November 2015 Contents 1 Introduction 3 2 General Formulation 4 3 The Equations 8 3.1 AHierarchyofEquations ........................... 8 3.2 BoundaryConditions. Impedance.. 13 3.3 Non-dimensionalisation . 15 4 Uniform Medium, No Mean Flow 16 4.1 Hard-walled Cylindrical Ducts . 16 4.2 RectangularDucts ............................... 21 4.3 SoftWallModes ................................ 21 4.4 AttenuationofSound.............................. 24 5 Uniform Medium with Mean Flow 26 5.1 Hard-walled Cylindrical Ducts . 26 5.2 SoftWallandUniformMeanFlow . 29 6 Source Expansion 32 6.1 ModalAmplitudes ............................... 32 6.2 RotatingFan .................................. 32 6.3 Tyler and Sofrin Rule for Rotor-Stator Interaction . ..... 33 6.4 PointSourceinaLinedFlowDuct . 35 6.5 PointSourceinaDuctWall .......................... 38 7 Reflection and Transmission 40 7.1 A Discontinuity in Diameter . 40 7.2 OpenEndReflection .............................. 43 VKI - 1 - CONTENTS CONTENTS A Appendix 49 A.1 BesselFunctions ................................ 49 A.2 AnImportantComplexSquareRoot . 51 A.3 Myers’EnergyCorollary ............................ 52 VKI - 2 - 1. INTRODUCTION CONTENTS 1 Introduction In a duct of constant cross section, with a medium and boundary conditions independent of the axial position, the wave equation for time-harmonic perturbations may be solved by means of a series expansion in a particular family of self-similar solutions, called modes. They are related to the eigensolutions of a two-dimensional operator, that results from the wave equation, on a cross section of the duct. For the common situation of a uniform medium without flow, this operator is the well-known Laplace operator 2. For a non- uniform medium, and in particular with mean flow, the details become mo∇re complicated, but the concept of duct modes remains by and large the same1. -
Ch 12: Sound Medium Vs Velocity
Ch 12: Sound Medium vs velocity • Sound is a compression wave (longitudinal) which needs a medium to compress. A wave has regions of high and low pressure. • Speed- different for various materials. Depends on the elastic modulus, B and the density, ρ of the material. v B/ • Speed varies with temperature by: v (331 0.60T)m/s • Here we assume t = 20°C so v=343m/s Sound perceptions • A listener is sensitive to 2 different aspects of sound: Loudness and Pitch. Each is subjective yet measureable. • Loudness is related to Energy of the wave • Pitch (highness or lowness of sound) is determined by the frequency of the wave. • The Audible Range of human hearing is from 20Hz to 20,000Hz with higher frequencies disappearing as we age. Beyond hearing • Sound frequencies above the audible range are called ultrasonic (above 20,000 Hz). Dogs can detect sounds as high as 50,000 Hz and bats as high as 100,000 Hz. Many medicinal applications use ultrasonic sounds. • Sound frequencies below 20 Hz are called infrasonic. Sources include earthquakes, thunder, volcanoes, & waves made by heavy machinery. Graphical analysis of sound • We can look at a compression (pressure) wave from a perspective of displacement or of pressure variations. The waves produced by each are ¼ λ out of phase with each other. Sound Intensity • Loudness is a sensation measuring the intensity of a wave. • Intensity = energy transported per unit time across a unit area. I≈A2 • Intensity (I) has units power/area = watt/m2 • Human ear can detect I from 10-12 w/m2 to 1w/m2 which is a wide range! • To make a sound twice as loud requires 10x the intensity. -

Waves and Music
Team: Waves and Music Part I. Standing Waves Whenever a wave ( sound, heat, light, ...) is confined to a finite region of space (string, pipe, cavity, ... ) , something remarkable happens − the space fills up with a spectrum of vibrating patterns called “standing waves”. Confining a wave “quantizes” the frequency. Standing waves explain the production of sound by musical instruments and the existence of stationary states (energy levels) in atoms and molecules. Standing waves are set up on a guitar string when plucked, on a violin string when bowed, and on a piano string when struck. They are set up in the air inside an organ pipe, a flute, or a saxophone. They are set up on the plastic membrane of a drumhead, the metal disk of a cymbal, and the metal bar of a xylophone. They are set up in the “electron cloud” of an atom. Standing waves are produced when you ring a bell, drop a coin, blow across an empty soda bottle, sing in a shower stall, or splash water in a bathtub. Standing waves exist in your mouth cavity when you speak and in your ear canal when you hear. Electromagnetic standing waves fill a laser cavity and a microwave oven. Quantum-mechanical standing waves fill the space inside atomic systems and nano devices. A. Normal Modes. Harmonic Spectrum. A mass on a spring has one natural frequency at which it freely oscillates up and down. A stretched string with fixed ends can oscillate up and down with a whole spectrum of frequencies and patterns of vibration. Mass on Spring String with Fixed Ends (mass m, spring constant k) (length L, tension F, mass density µ) ___ ___ f = (1/2 π) √k/m f1 = (1/2L) √F/ µ Fundamental nd f2 = 2f 1 2 harmonic rd f3 = 3f 1 3 harmonic th f4 = 4f 1 4 harmonic • • • These special “Modes of Vibration” of a string are called STANDING WAVES or NORMAL MODES . -

Standing Waves
Chapter 21. Superposition Chapter 21. Superposition The combination of two or more waves is called a superposition of waves. Applications of superposition range from musical instruments to the colors of an oil film to lasers. Chapter Goal: To understand and use the idea of superposition. 1 2 Copyright © 2008 Pearson Education, Inc., publishing as Pearson Addison-Wesley. Copyright © 2008 Pearson Education, Inc., publishing as Pearson Addison-Wesley. Principal of superposition Chapter 21. Superposition Topics: • The Principle of Superposition • Standing Waves • Transverse Standing Waves • Standing Sound Waves and Musical Superimposed Superposition Acoustics N • Interference in One Dimension = + + + = • The Mathematics of Interference Dnet D1 D2 ... DN ∑Di i=1 • Interference in Two and Three Dimensions • Beats 3 4 Copyright © 2008 Pearson Education, Inc., publishing as Pearson Addison-Wesley. Copyright © 2008 Pearson Education, Inc., publishing as Pearson Addison-Wesley. When a wave pulse on a string reflects from a hard boundary, how is the reflected pulse related to the incident pulse? A. Shape unchanged, amplitude unchanged Chapter 21. Reading Quizzes B. Shape inverted, amplitude unchanged C. Shape unchanged, amplitude reduced D. Shape inverted, amplitude reduced E. Amplitude unchanged, speed reduced 5 6 Copyright © 2008 Pearson Education, Inc., publishing as Pearson Addison-Wesley. Copyright © 2008 Pearson Education, Inc., publishing as Pearson Addison-Wesley. When a wave pulse on a string reflects There are some points on a standing from a hard boundary, how is the wave that never move. What are reflected pulse related to the incident these points called? pulse? A. Shape unchanged, amplitude unchanged A. Harmonics B. Shape inverted, amplitude unchanged B. -
Voltage and Frequency Dependency
System Operability Framework Voltage and Frequency Dependency The demand and generation we see on the electricity network has been changing in recent years and is set to continue to change into the future. One of the affects of this change is how frequency and voltage disturbances interact with each other. They will interact more in the future, driving a dynamic voltage requirement. Executive Summary changes in the future, so will the combined frequency and voltage effect change. Frequency and voltage are usually considered and assessed independently in the design and operation of Figure 1 summarises the decline in synchronous electrical networks. However, they are intrinsically linked. generation likely to be seen in the next 10 years, according This investigation seeks to understand this relationship, to current trends. Our Future Energy Scenarios (FES)[1] how it is changing over time and how it may behave in details this further. different regions of Great Britain (GB). This study has found that to support frequency and All faults on our system, such as a line or generator voltage recovery, additional dynamic voltage support will tripping, will have a combined frequency and voltage be required to replace that which is currently provided by effect. In the future, with the reduction in synchronous synchronous generation. Distributed energy recourses generation, combined events will be more significant and (DER) could also provide this in the future, in addition to will need to be considered. other technologies. Each area studied in this assessment has a unique set of National Grid has recently published a road map for results. -
Examples of Wave Superposition
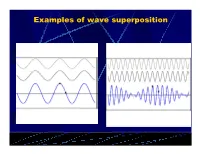
Examples of wave superposition When two waves are traveling in opposite directions, such as when a wave is reflected back on itself, the principle of superposition can be applied at different points on the string. At point A, the two waves cancel each other at all times. At this point, the string will not oscillate at all; this is called a node. At point B, both waves will be in phase at all times. The two waves always add, producing a displacement twice that of each wave by itself. This is called an antinode. This pattern of oscillation is called a standing wave. The waves traveling in opposite directions interfere in a way that produces a standing or fixed pattern. The distance between adjacent nodes or adjacent antinodes is half the wavelength of the original waves. At the nodes, it is not moving at all. At points between the nodes and antinodes, the amplitude has intermediate values. For a string fixed at both ends, the simplest standing wave, the fundamental or first harmonic, has nodes at both ends and an antinode in the middle. v v f 2L The second harmonic has a node at the midpoint of the string, and a wavelength equal to L. v v f L The third harmonic has four nodes (counting the ones at the ends) and three antinodes, and a wavelength v v equal to two-thirds L. f (2 / 3)L 4B-10 MONOCHORD What is the purpose of tightening or loosening the string ? What role do the frets play ? Real Musical Instrument F v v v Chinese Zither f m where 2L L CHANGING TENSION OF THE STRING AFFECTS THE SPEED OF WAVE PROPAGATION AND CHANGES THE FUNDAMENTAL FREQUENCY THE BRIDGE ACTS AS A FRET THAT EFFECTIVELY CHANGES THE LENGTH OF THE WIRE AND THE FUNDAMENTAL FREQUENCY Physics 214 Fall 2010 4/13/2011 5 A guitar string has a mass of 4 g, a length of 74 cm, and a tension of 400 N. -

The Origins of Phantom Partials in the Piano
Rollins College Rollins Scholarship Online Honors Program Theses Spring 2020 The Origins of Phantom Partials in the Piano Lauren M. Neldner Rollins College, [email protected] Follow this and additional works at: https://scholarship.rollins.edu/honors Part of the Other Physics Commons, and the Statistical, Nonlinear, and Soft Matter Physics Commons Recommended Citation Neldner, Lauren M., "The Origins of Phantom Partials in the Piano" (2020). Honors Program Theses. 105. https://scholarship.rollins.edu/honors/105 This Open Access is brought to you for free and open access by Rollins Scholarship Online. It has been accepted for inclusion in Honors Program Theses by an authorized administrator of Rollins Scholarship Online. For more information, please contact [email protected]. THE ORIGINS OF PHANTOM PARTIALS IN THE PIANO Lauren M. Neldner A Senior Honors Project Submitted in Partial Fulfillment of the Requirements of the Honors Degree Program March 2020 Faculty Sponsor: Thomas R. Moore Rollins College Winter Park, FL Contents Acknowledgments 6 1 Introduction 7 1.1 History of the Piano . 7 1.2 The Modern Piano . 9 1.2.1 Frame and Case . 11 1.2.2 Soundboard . 11 1.2.3 Bridges . 13 1.2.4 Strings . 14 1.2.5 Hammers and Action . 16 1.2.6 Pedals and Dampers . 17 2 Phantom Partials 19 2.1 Historical Context . 20 2.2 Historic Theory of Phantom Partials . 21 2.3 Production in Non-string Components . 25 3 Two Plausible Theories 30 3.1 Pressure Induced Nonlinearity . 30 3.2 Contact Nonlinearity . 33 1 4 Experiments and Results 37 4.1 Pressure experiments .