An Experiment in High-Frequency Sediment Acoustics: SAX99
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

AN INTRODUCTION to MUSIC THEORY Revision A
AN INTRODUCTION TO MUSIC THEORY Revision A By Tom Irvine Email: [email protected] July 4, 2002 ________________________________________________________________________ Historical Background Pythagoras of Samos was a Greek philosopher and mathematician, who lived from approximately 560 to 480 BC. Pythagoras and his followers believed that all relations could be reduced to numerical relations. This conclusion stemmed from observations in music, mathematics, and astronomy. Pythagoras studied the sound produced by vibrating strings. He subjected two strings to equal tension. He then divided one string exactly in half. When he plucked each string, he discovered that the shorter string produced a pitch which was one octave higher than the longer string. A one-octave separation occurs when the higher frequency is twice the lower frequency. German scientist Hermann Helmholtz (1821-1894) made further contributions to music theory. Helmholtz wrote “On the Sensations of Tone” to establish the scientific basis of musical theory. Natural Frequencies of Strings A note played on a string has a fundamental frequency, which is its lowest natural frequency. The note also has overtones at consecutive integer multiples of its fundamental frequency. Plucking a string thus excites a number of tones. Ratios The theories of Pythagoras and Helmholz depend on the frequency ratios shown in Table 1. Table 1. Standard Frequency Ratios Ratio Name 1:1 Unison 1:2 Octave 1:3 Twelfth 2:3 Fifth 3:4 Fourth 4:5 Major Third 3:5 Major Sixth 5:6 Minor Third 5:8 Minor Sixth 1 These ratios apply both to a fundamental frequency and its overtones, as well as to relationship between separate keys. -

The Emergence of Low Frequency Active Acoustics As a Critical
Low-Frequency Acoustics as an Antisubmarine Warfare Technology GORDON D. TYLER, JR. THE EMERGENCE OF LOW–FREQUENCY ACTIVE ACOUSTICS AS A CRITICAL ANTISUBMARINE WARFARE TECHNOLOGY For the three decades following World War II, the United States realized unparalleled success in strategic and tactical antisubmarine warfare operations by exploiting the high acoustic source levels of Soviet submarines to achieve long detection ranges. The emergence of the quiet Soviet submarine in the 1980s mandated that new and revolutionary approaches to submarine detection be developed if the United States was to continue to achieve its traditional antisubmarine warfare effectiveness. Since it is immune to sound-quieting efforts, low-frequency active acoustics has been proposed as a replacement for traditional passive acoustic sensor systems. The underlying science and physics behind this technology are currently being investigated as part of an urgent U.S. Navy initiative, but the United States and its NATO allies have already begun development programs for fielding sonars using low-frequency active acoustics. Although these first systems have yet to become operational in deep water, research is also under way to apply this technology to Third World shallow-water areas and to anticipate potential countermeasures that an adversary may develop. HISTORICAL PERSPECTIVE The nature of naval warfare changed dramatically capability of their submarine forces, and both countries following the conclusion of World War II when, in Jan- have come to regard these submarines as principal com- uary 1955, the USS Nautilus sent the message, “Under ponents of their tactical naval forces, as well as their way on nuclear power,” while running submerged from strategic arsenals. -

Fundamentals of Duct Acoustics
Fundamentals of Duct Acoustics Sjoerd W. Rienstra Technische Universiteit Eindhoven 16 November 2015 Contents 1 Introduction 3 2 General Formulation 4 3 The Equations 8 3.1 AHierarchyofEquations ........................... 8 3.2 BoundaryConditions. Impedance.. 13 3.3 Non-dimensionalisation . 15 4 Uniform Medium, No Mean Flow 16 4.1 Hard-walled Cylindrical Ducts . 16 4.2 RectangularDucts ............................... 21 4.3 SoftWallModes ................................ 21 4.4 AttenuationofSound.............................. 24 5 Uniform Medium with Mean Flow 26 5.1 Hard-walled Cylindrical Ducts . 26 5.2 SoftWallandUniformMeanFlow . 29 6 Source Expansion 32 6.1 ModalAmplitudes ............................... 32 6.2 RotatingFan .................................. 32 6.3 Tyler and Sofrin Rule for Rotor-Stator Interaction . ..... 33 6.4 PointSourceinaLinedFlowDuct . 35 6.5 PointSourceinaDuctWall .......................... 38 7 Reflection and Transmission 40 7.1 A Discontinuity in Diameter . 40 7.2 OpenEndReflection .............................. 43 VKI - 1 - CONTENTS CONTENTS A Appendix 49 A.1 BesselFunctions ................................ 49 A.2 AnImportantComplexSquareRoot . 51 A.3 Myers’EnergyCorollary ............................ 52 VKI - 2 - 1. INTRODUCTION CONTENTS 1 Introduction In a duct of constant cross section, with a medium and boundary conditions independent of the axial position, the wave equation for time-harmonic perturbations may be solved by means of a series expansion in a particular family of self-similar solutions, called modes. They are related to the eigensolutions of a two-dimensional operator, that results from the wave equation, on a cross section of the duct. For the common situation of a uniform medium without flow, this operator is the well-known Laplace operator 2. For a non- uniform medium, and in particular with mean flow, the details become mo∇re complicated, but the concept of duct modes remains by and large the same1. -
Standing Waves Physics Lab I
Standing Waves Physics Lab I Objective In this series of experiments, the resonance conditions for standing waves on a string will be tested experimentally. Equipment List PASCO SF-9324 Variable Frequency Mechanical Wave Driver, PASCO PI-9587B Digital Frequency Generator, Table Rod, Elastic String, Table Clamp with Pulley, Set of 50 g and 100 g Masses with Mass Holder, Meter Stick. Theoretical Background Consider an elastic string. One end of the string is tied to a rod. The other end is under tension by a hanging mass and pulley arrangement. The string is held taut by the applied force of the hanging mass. Suppose the string is plucked at or near the taut end. The string begins to vibrate. As the string vibrates, a wave travels along the string toward the ¯xed end. Upon arriving at the ¯xed end, the wave is reflected back toward the taut end of the string with the same amount of energy given by the pluck, ideally. Suppose you were to repeatedly pluck the string. The time between each pluck is 1 second and you stop plucking after 10 seconds. The frequency of your pluck is then de¯ned as 1 pluck per every second. Frequency is a measure of the number of repeating cycles or oscillations completed within a de¯nite time frame. Frequency has units of Hertz abbreviated Hz. As you continue to pluck the string you notice that the set of waves travelling back and forth between the taut and ¯xed ends of the string constructively and destructively interact with each other as they propagate along the string. -
Ch 12: Sound Medium Vs Velocity
Ch 12: Sound Medium vs velocity • Sound is a compression wave (longitudinal) which needs a medium to compress. A wave has regions of high and low pressure. • Speed- different for various materials. Depends on the elastic modulus, B and the density, ρ of the material. v B/ • Speed varies with temperature by: v (331 0.60T)m/s • Here we assume t = 20°C so v=343m/s Sound perceptions • A listener is sensitive to 2 different aspects of sound: Loudness and Pitch. Each is subjective yet measureable. • Loudness is related to Energy of the wave • Pitch (highness or lowness of sound) is determined by the frequency of the wave. • The Audible Range of human hearing is from 20Hz to 20,000Hz with higher frequencies disappearing as we age. Beyond hearing • Sound frequencies above the audible range are called ultrasonic (above 20,000 Hz). Dogs can detect sounds as high as 50,000 Hz and bats as high as 100,000 Hz. Many medicinal applications use ultrasonic sounds. • Sound frequencies below 20 Hz are called infrasonic. Sources include earthquakes, thunder, volcanoes, & waves made by heavy machinery. Graphical analysis of sound • We can look at a compression (pressure) wave from a perspective of displacement or of pressure variations. The waves produced by each are ¼ λ out of phase with each other. Sound Intensity • Loudness is a sensation measuring the intensity of a wave. • Intensity = energy transported per unit time across a unit area. I≈A2 • Intensity (I) has units power/area = watt/m2 • Human ear can detect I from 10-12 w/m2 to 1w/m2 which is a wide range! • To make a sound twice as loud requires 10x the intensity. -
Voltage and Frequency Dependency
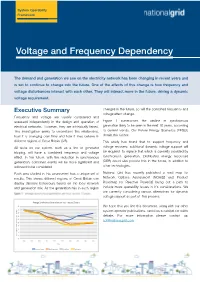
System Operability Framework Voltage and Frequency Dependency The demand and generation we see on the electricity network has been changing in recent years and is set to continue to change into the future. One of the affects of this change is how frequency and voltage disturbances interact with each other. They will interact more in the future, driving a dynamic voltage requirement. Executive Summary changes in the future, so will the combined frequency and voltage effect change. Frequency and voltage are usually considered and assessed independently in the design and operation of Figure 1 summarises the decline in synchronous electrical networks. However, they are intrinsically linked. generation likely to be seen in the next 10 years, according This investigation seeks to understand this relationship, to current trends. Our Future Energy Scenarios (FES)[1] how it is changing over time and how it may behave in details this further. different regions of Great Britain (GB). This study has found that to support frequency and All faults on our system, such as a line or generator voltage recovery, additional dynamic voltage support will tripping, will have a combined frequency and voltage be required to replace that which is currently provided by effect. In the future, with the reduction in synchronous synchronous generation. Distributed energy recourses generation, combined events will be more significant and (DER) could also provide this in the future, in addition to will need to be considered. other technologies. Each area studied in this assessment has a unique set of National Grid has recently published a road map for results. -

Demonstration of Acoustic Beats in the Study of Physics
Journal of Multidisciplinary Engineering Science and Technology (JMEST) ISSN: 2458-9403 Vol. 4 Issue 6, June - 2017 Demonstration Of Acoustic Beats In The Study Of Physics Aleksei Gavrilov Department of Cybernetics Division of Physics Tallinn University of Technology Tallinn, Ehitajate tee 5, Estonia e-mail: [email protected] Abstract ― The article describes a device for equals to the difference of frequencies of the added demonstration of acoustic beats effect at the oscillations. To eliminate these inconveniences, two lecture on physics separate generators of low frequency oscillations, an audio amplifier and a loudspeaker are often used. In Keywords—beating; acoustics; device; this article, we describe a small-sized and convenient demonstration; physics device, which combines all these functions. II. Construction of the device I. Introduction Schematically the device is quite simple (see Addition of two harmonic oscillations with close Fig.1). It consists of a stabilized power supply, two frequencies creates so-called beats. Oscillations must identical audio frequency generators and an amplifier occur in the same direction. Beats in this case are with a loudspeaker at the output. From the generator periodic changes in the amplitude of the oscillations outputs the sound frequency voltage is connected [1]. With acoustic waves, these are periodic simultaneously to the input of the amplifier. The oscillations of the sound intensity. Usually this effect is frequency of one of the generators can be slightly demonstrated by means of two tuning forks [2]. changed by a regulator in relation to the frequency of However, the volume level at such a demonstration is the other generator. -

Standing Waves on a String PURPOSE
San Diego Miramar College Physics 197 NAME: _______________________________________ DATE: _________________________ LABORATORY PARTNERS : ______________________________________________________ Standing Waves on a String PURPOSE: To study the relationship among stretching force (FT), wavelength (흺), vibrational frequency (f), linear mass density (µ), and wave velocity (v) in a vibrating string; to observe standing waves and the harmonic frequencies of a stretched string. THEORY: Standing waves can be produced when two waves of identical wavelength, velocity, and amplitude are traveling in opposite directions through the same medium. Standing waves can be established using a stretched string to create a train of waves, set up by a vibrating body, and reflected at the end of the string. Newly generated waves will interfere with the old reflected waves. If the conditions are right, then a standing wave pattern will be created. A Stretched string has many modes of vibration, i.e. standing waves. It may vibrate as a single segment; its length is then equal to one half of the wavelength of the vibrations produced. It may also vibrate in two segments, with a node at each end in the middle; the wavelength produced is then equal to the length of the string. It may also vibrate in a larger number of segments. In every case, the length of the string is some integer multiple of half wavelengths. So, if a string is stretched between two fixed points, the ends are constrained not to move; hence, these are the nodes. In a standing wave the nodes, or the points that do not vibrate, occur every half the wavelength; thus, the ends of the string must correspond to nodes and the whole length of the string must accommodate an integer nymber of half wavelengths. -

AMI Radio Frequency Frequently Asked Questions
AMI Radio Frequency Frequently Asked Questions Q: Are there any health hazards associated with the new technology? A: No. The equipment operates at a low-power radio frequency, comparable to a cordless telephone. All equipment operates in compliance with state and federal communication standards. Water meters are typically installed away from the house so potential exposure is very limited; the communication device only turns on for a fraction of a second per day (totaling approximately 2 ½ minutes per year). Q: Do the AMI communication devices meet Federal Communications Commission (FCC) Radio Frequency (RF) limits? A: Like all commercially available telecommunication equipment, the AMI communication devices are required to meet Federal Communications Commission (FCC) Radio Frequency (RF) limits. Equipment manufacturers have vigorously tested and reviewed independent lab results demonstrating that the communication devices meet or exceed FCC limits. Common household items like cell phones, microwave ovens, baby monitors, cordless telephones and Wi-Fi routers emit much more radio frequency energy than AMI meters. Q: What is the frequency range for the radio communication devices? A: The meter communication devices and the network communication system will operate in the 450 to 470 megahertz (MHz) bands. The technology products the City will use for its Advanced Metering Infrastructure project comply with U.S. Federal Communications Commission (FCC) guidelines for human exposure to RF energy (FCC OET bulletin 65). Q: What are the key factors that contribute to RF Exposure from a communication device? A: There are three key factors that contribute to RF exposure: Signal duration: The communication devices connected to the water meters will normally transmit a signal for a fraction of a second per day or for a total of less than two minutes per year. -

The Sounds of Music: Science of Musical Scales∗ 1
SERIES ARTICLE The Sounds of Music: Science of Musical Scales∗ 1. Human Perception of Sound Sushan Konar Both, human appreciation of music and musical genres tran- scend time and space. The universality of musical genres and associated musical scales is intimately linked to the physics of sound, and the special characteristics of human acoustic sensitivity. In this series of articles, we examine the science underlying the development of the heptatonic scale, one of the most prevalent scales of the modern musical genres, both western and Indian. Sushan Konar works on stellar compact objects. She Introduction also writes popular science articles and maintains a Fossil records indicate that the appreciation of music goes back weekly astrophysics-related blog called Monday Musings. to the dawn of human sentience, and some of the musical scales in use today could also be as ancient. This universality of musi- cal scales likely owes its existence to an amazing circularity (or periodicity) inherent in human sensitivity to sound frequencies. Most musical scales are specific to a particular genre of music, and there exists quite a number of them. However, the ‘hepta- 1 1 tonic’ scale happens to have a dominating presence in the world Having seven base notes. music scene today. It is interesting to see how this has more to do with the physics of sound and the physiology of human auditory perception than history. We shall devote this first article in the se- ries to understand the specialities of human response to acoustic frequencies. Human ear is a remarkable organ in many ways. The range of hearing spans three orders of magnitude in frequency, extending Keywords from ∼20 Hz to ∼20,000 Hz (Figure 1) even though the sensitivity String vibration, beat frequencies, consonance-dissonance, pitch, tone. -

Sound Waves and Beats
Computer 32 Sound Waves and Beats Sound waves consist of a series of air pressure variations. A Microphone diaphragm records these variations by moving in response to the pressure changes. The diaphragm motion is then converted to an electrical signal. Using a Microphone and a computer interface, you can explore the properties of common sounds. The first property you will measure is the period, or the time for one complete cycle of repetition. Since period is a time measurement, it is usually written as T. The reciprocal of the period (1/T) is called the frequency, f, the number of complete cycles per second. Frequency is measured in hertz (Hz). 1 Hz = 1 s–1. A second property of sound is the amplitude. As the pressure varies, it goes above and below the average pressure in the room. The maximum variation above or below the pressure mid-point is called the amplitude. The amplitude of a sound is closely related to its loudness. When two sound waves overlap, their air pressure variations will combine. For sound waves, this combination is additive. We say that sound follows the principle of linear superposition. Beats are an example of superposition. Two sounds of nearly the same frequency will create a distinctive variation of sound amplitude, which we call beats. You can study this phenomenon with a Microphone, lab interface, and computer. OBJECTIVES Measure the frequency and period of sound waves from tuning forks. Measure the amplitude of sound waves from tuning forks. Observe beats between the sounds of two tuning forks. MATERIALS computer Logger Pro Vernier computer interface 2 tuning forks or electronic keyboard Vernier Microphone Physics with Vernier 32 - 1 Computer 32 PRELIMINARY QUESTIONS 1. -

Correlation Between the Frequencies of Harmonic Partials Generated from Selected Fundamentals and Pitches of Supplied Tones
University of Montana ScholarWorks at University of Montana Graduate Student Theses, Dissertations, & Professional Papers Graduate School 1962 Correlation between the frequencies of harmonic partials generated from selected fundamentals and pitches of supplied tones Chester Orlan Strom The University of Montana Follow this and additional works at: https://scholarworks.umt.edu/etd Let us know how access to this document benefits ou.y Recommended Citation Strom, Chester Orlan, "Correlation between the frequencies of harmonic partials generated from selected fundamentals and pitches of supplied tones" (1962). Graduate Student Theses, Dissertations, & Professional Papers. 1913. https://scholarworks.umt.edu/etd/1913 This Thesis is brought to you for free and open access by the Graduate School at ScholarWorks at University of Montana. It has been accepted for inclusion in Graduate Student Theses, Dissertations, & Professional Papers by an authorized administrator of ScholarWorks at University of Montana. For more information, please contact [email protected]. CORRELATION BETWEEN THE FREQUENCIES OF HARMONIC PARTIALS GENERATED FROM SELECTED FUNDAMENTALS AND PITCHES OF SUPPLIED TONES by CHESTER ORLAN STROM BoMo Montana State University, 1960 Presented in partial fulfillment of the requirements for the degree of Master of Music MONTANA STATE UNIVERSITY 1962 Approved by: Chairman, Board of Examine Dean, Graduate School JUL 3 1 1902 Date UMI Number: EP35290 All rights reserved INFORMATION TO ALL USERS The quality of this reproduction is dependent upon the quality of the copy submitted. In the unlikely event that the author did not send a complete manuscript and there are missing pages, these will be noted. Also, if material had to be removed, a note will indicate the deletion.