Fundamentals of Duct Acoustics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Appendix a Short Course in Taylor Series
Appendix A Short Course in Taylor Series The Taylor series is mainly used for approximating functions when one can identify a small parameter. Expansion techniques are useful for many applications in physics, sometimes in unexpected ways. A.1 Taylor Series Expansions and Approximations In mathematics, the Taylor series is a representation of a function as an infinite sum of terms calculated from the values of its derivatives at a single point. It is named after the English mathematician Brook Taylor. If the series is centered at zero, the series is also called a Maclaurin series, named after the Scottish mathematician Colin Maclaurin. It is common practice to use a finite number of terms of the series to approximate a function. The Taylor series may be regarded as the limit of the Taylor polynomials. A.2 Definition A Taylor series is a series expansion of a function about a point. A one-dimensional Taylor series is an expansion of a real function f(x) about a point x ¼ a is given by; f 00ðÞa f 3ðÞa fxðÞ¼faðÞþf 0ðÞa ðÞþx À a ðÞx À a 2 þ ðÞx À a 3 þÁÁÁ 2! 3! f ðÞn ðÞa þ ðÞx À a n þÁÁÁ ðA:1Þ n! © Springer International Publishing Switzerland 2016 415 B. Zohuri, Directed Energy Weapons, DOI 10.1007/978-3-319-31289-7 416 Appendix A: Short Course in Taylor Series If a ¼ 0, the expansion is known as a Maclaurin Series. Equation A.1 can be written in the more compact sigma notation as follows: X1 f ðÞn ðÞa ðÞx À a n ðA:2Þ n! n¼0 where n ! is mathematical notation for factorial n and f(n)(a) denotes the n th derivation of function f evaluated at the point a. -

Student Understanding of Taylor Series Expansions in Statistical Mechanics
PHYSICAL REVIEW SPECIAL TOPICS - PHYSICS EDUCATION RESEARCH 9, 020110 (2013) Student understanding of Taylor series expansions in statistical mechanics Trevor I. Smith,1 John R. Thompson,2,3 and Donald B. Mountcastle2 1Department of Physics and Astronomy, Dickinson College, Carlisle, Pennsylvania 17013, USA 2Department of Physics and Astronomy, University of Maine, Orono, Maine 04469, USA 3Maine Center for Research in STEM Education, University of Maine, Orono, Maine 04469, USA (Received 2 March 2012; revised manuscript received 23 May 2013; published 8 August 2013) One goal of physics instruction is to have students learn to make physical meaning of specific mathematical expressions, concepts, and procedures in different physical settings. As part of research investigating student learning in statistical physics, we are developing curriculum materials that guide students through a derivation of the Boltzmann factor using a Taylor series expansion of entropy. Using results from written surveys, classroom observations, and both individual think-aloud and teaching interviews, we present evidence that many students can recognize and interpret series expansions, but they often lack fluency in creating and using a Taylor series appropriately, despite previous exposures in both calculus and physics courses. DOI: 10.1103/PhysRevSTPER.9.020110 PACS numbers: 01.40.Fk, 05.20.Ày, 02.30.Lt, 02.30.Mv students’ use of Taylor series expansion to derive and I. INTRODUCTION understand the Boltzmann factor as a component of proba- Over the past several decades, much work has been done bility in the canonical ensemble. While this is a narrow investigating ways in which students understand and learn topic, we feel that it serves as an excellent example of physics (see Refs. -
Nonlinear Optics
Nonlinear Optics: A very brief introduction to the phenomena Paul Tandy ADVANCED OPTICS (PHYS 545), Spring 2010 Dr. Mendes INTRO So far we have considered only the case where the polarization density is proportionate to the electric field. The electric field itself is generally supplied by a laser source. PE= ε0 χ Where P is the polarization density, E is the electric field, χ is the susceptibility, and ε 0 is the permittivity of free space. We can imagine that the electric field somehow induces a polarization in the material. As the field increases the polarization also in turn increases. But we can also imagine that this process does not continue indefinitely. As the field grows to be very large the field itself starts to become on the order of the electric fields between the atoms in the material (medium). As this occurs the material itself becomes slightly altered and the behavior is no longer linear in nature but instead starts to become weakly nonlinear. We can represent this as a Taylor series expansion model in the electric field. ∞ n 23 PAEAEAEAE==++∑ n 12 3+... n=1 This model has become so popular that the coefficient scaling has become standardized using the letters d and χ (3) as parameters corresponding the quadratic and cubic terms. Higher order terms would play a role too if the fields were extremely high. 2(3)3 PEdEE=++()εχ0 (2) ( 4χ ) + ... To get an idea of how large a typical field would have to be before we see a nonlinear effect, let us scale the above equation by the first order term. -

An Experiment in High-Frequency Sediment Acoustics: SAX99
An Experiment in High-Frequency Sediment Acoustics: SAX99 Eric I. Thorsos1, Kevin L. Williams1, Darrell R. Jackson1, Michael D. Richardson2, Kevin B. Briggs2, and Dajun Tang1 1 Applied Physics Laboratory, University of Washington, 1013 NE 40th St, Seattle, WA 98105, USA [email protected], [email protected], [email protected], [email protected] 2 Marine Geosciences Division, Naval Research Laboratory, Stennis Space Center, MS 39529, USA [email protected], [email protected] Abstract A major high-frequency sediment acoustics experiment was conducted in shallow waters of the northeastern Gulf of Mexico. The experiment addressed high-frequency acoustic backscattering from the seafloor, acoustic penetration into the seafloor, and acoustic propagation within the seafloor. Extensive in situ measurements were made of the sediment geophysical properties and of the biological and hydrodynamic processes affecting the environment. An overview is given of the measurement program. Initial results from APL-UW acoustic measurements and modelling are then described. 1. Introduction “SAX99” (for sediment acoustics experiment - 1999) was conducted in the fall of 1999 at a site 2 km offshore of the Florida Panhandle and involved investigators from many institutions [1,2]. SAX99 was focused on measurements and modelling of high-frequency sediment acoustics and therefore required detailed environmental characterisation. Acoustic measurements included backscattering from the seafloor, penetration into the seafloor, and propagation within the seafloor at frequencies chiefly in the 10-300 kHz range [1]. Acoustic backscattering and penetration measurements were made both above and below the critical grazing angle, about 30° for the sand seafloor at the SAX99 site. -

AN INTRODUCTION to MUSIC THEORY Revision A
AN INTRODUCTION TO MUSIC THEORY Revision A By Tom Irvine Email: [email protected] July 4, 2002 ________________________________________________________________________ Historical Background Pythagoras of Samos was a Greek philosopher and mathematician, who lived from approximately 560 to 480 BC. Pythagoras and his followers believed that all relations could be reduced to numerical relations. This conclusion stemmed from observations in music, mathematics, and astronomy. Pythagoras studied the sound produced by vibrating strings. He subjected two strings to equal tension. He then divided one string exactly in half. When he plucked each string, he discovered that the shorter string produced a pitch which was one octave higher than the longer string. A one-octave separation occurs when the higher frequency is twice the lower frequency. German scientist Hermann Helmholtz (1821-1894) made further contributions to music theory. Helmholtz wrote “On the Sensations of Tone” to establish the scientific basis of musical theory. Natural Frequencies of Strings A note played on a string has a fundamental frequency, which is its lowest natural frequency. The note also has overtones at consecutive integer multiples of its fundamental frequency. Plucking a string thus excites a number of tones. Ratios The theories of Pythagoras and Helmholz depend on the frequency ratios shown in Table 1. Table 1. Standard Frequency Ratios Ratio Name 1:1 Unison 1:2 Octave 1:3 Twelfth 2:3 Fifth 3:4 Fourth 4:5 Major Third 3:5 Major Sixth 5:6 Minor Third 5:8 Minor Sixth 1 These ratios apply both to a fundamental frequency and its overtones, as well as to relationship between separate keys. -

The Emergence of Low Frequency Active Acoustics As a Critical
Low-Frequency Acoustics as an Antisubmarine Warfare Technology GORDON D. TYLER, JR. THE EMERGENCE OF LOW–FREQUENCY ACTIVE ACOUSTICS AS A CRITICAL ANTISUBMARINE WARFARE TECHNOLOGY For the three decades following World War II, the United States realized unparalleled success in strategic and tactical antisubmarine warfare operations by exploiting the high acoustic source levels of Soviet submarines to achieve long detection ranges. The emergence of the quiet Soviet submarine in the 1980s mandated that new and revolutionary approaches to submarine detection be developed if the United States was to continue to achieve its traditional antisubmarine warfare effectiveness. Since it is immune to sound-quieting efforts, low-frequency active acoustics has been proposed as a replacement for traditional passive acoustic sensor systems. The underlying science and physics behind this technology are currently being investigated as part of an urgent U.S. Navy initiative, but the United States and its NATO allies have already begun development programs for fielding sonars using low-frequency active acoustics. Although these first systems have yet to become operational in deep water, research is also under way to apply this technology to Third World shallow-water areas and to anticipate potential countermeasures that an adversary may develop. HISTORICAL PERSPECTIVE The nature of naval warfare changed dramatically capability of their submarine forces, and both countries following the conclusion of World War II when, in Jan- have come to regard these submarines as principal com- uary 1955, the USS Nautilus sent the message, “Under ponents of their tactical naval forces, as well as their way on nuclear power,” while running submerged from strategic arsenals. -

Fourier Series
Chapter 10 Fourier Series 10.1 Periodic Functions and Orthogonality Relations The differential equation ′′ y + 2y = F cos !t models a mass-spring system with natural frequency with a pure cosine forcing function of frequency !. If 2 = !2 a particular solution is easily found by undetermined coefficients (or by∕ using Laplace transforms) to be F y = cos !t. p 2 !2 − If the forcing function is a linear combination of simple cosine functions, so that the differential equation is N ′′ 2 y + y = Fn cos !nt n=1 X 2 2 where = !n for any n, then, by linearity, a particular solution is obtained as a sum ∕ N F y (t)= n cos ! t. p 2 !2 n n=1 n X − This simple procedure can be extended to any function that can be repre- sented as a sum of cosine (and sine) functions, even if that summation is not a finite sum. It turns out that the functions that can be represented as sums in this form are very general, and include most of the periodic functions that are usually encountered in applications. 723 724 10 Fourier Series Periodic Functions A function f is said to be periodic with period p> 0 if f(t + p)= f(t) for all t in the domain of f. This means that the graph of f repeats in successive intervals of length p, as can be seen in the graph in Figure 10.1. y p 2p 3p 4p 5p Fig. 10.1 An example of a periodic function with period p. -
Standing Waves Physics Lab I
Standing Waves Physics Lab I Objective In this series of experiments, the resonance conditions for standing waves on a string will be tested experimentally. Equipment List PASCO SF-9324 Variable Frequency Mechanical Wave Driver, PASCO PI-9587B Digital Frequency Generator, Table Rod, Elastic String, Table Clamp with Pulley, Set of 50 g and 100 g Masses with Mass Holder, Meter Stick. Theoretical Background Consider an elastic string. One end of the string is tied to a rod. The other end is under tension by a hanging mass and pulley arrangement. The string is held taut by the applied force of the hanging mass. Suppose the string is plucked at or near the taut end. The string begins to vibrate. As the string vibrates, a wave travels along the string toward the ¯xed end. Upon arriving at the ¯xed end, the wave is reflected back toward the taut end of the string with the same amount of energy given by the pluck, ideally. Suppose you were to repeatedly pluck the string. The time between each pluck is 1 second and you stop plucking after 10 seconds. The frequency of your pluck is then de¯ned as 1 pluck per every second. Frequency is a measure of the number of repeating cycles or oscillations completed within a de¯nite time frame. Frequency has units of Hertz abbreviated Hz. As you continue to pluck the string you notice that the set of waves travelling back and forth between the taut and ¯xed ends of the string constructively and destructively interact with each other as they propagate along the string. -
Ch 12: Sound Medium Vs Velocity
Ch 12: Sound Medium vs velocity • Sound is a compression wave (longitudinal) which needs a medium to compress. A wave has regions of high and low pressure. • Speed- different for various materials. Depends on the elastic modulus, B and the density, ρ of the material. v B/ • Speed varies with temperature by: v (331 0.60T)m/s • Here we assume t = 20°C so v=343m/s Sound perceptions • A listener is sensitive to 2 different aspects of sound: Loudness and Pitch. Each is subjective yet measureable. • Loudness is related to Energy of the wave • Pitch (highness or lowness of sound) is determined by the frequency of the wave. • The Audible Range of human hearing is from 20Hz to 20,000Hz with higher frequencies disappearing as we age. Beyond hearing • Sound frequencies above the audible range are called ultrasonic (above 20,000 Hz). Dogs can detect sounds as high as 50,000 Hz and bats as high as 100,000 Hz. Many medicinal applications use ultrasonic sounds. • Sound frequencies below 20 Hz are called infrasonic. Sources include earthquakes, thunder, volcanoes, & waves made by heavy machinery. Graphical analysis of sound • We can look at a compression (pressure) wave from a perspective of displacement or of pressure variations. The waves produced by each are ¼ λ out of phase with each other. Sound Intensity • Loudness is a sensation measuring the intensity of a wave. • Intensity = energy transported per unit time across a unit area. I≈A2 • Intensity (I) has units power/area = watt/m2 • Human ear can detect I from 10-12 w/m2 to 1w/m2 which is a wide range! • To make a sound twice as loud requires 10x the intensity. -

Graduate Macro Theory II: Notes on Log-Linearization
Graduate Macro Theory II: Notes on Log-Linearization Eric Sims University of Notre Dame Spring 2017 The solutions to many discrete time dynamic economic problems take the form of a system of non-linear difference equations. There generally exists no closed-form solution for such problems. As such, we must result to numerical and/or approximation techniques. One particularly easy and very common approximation technique is that of log linearization. We first take natural logs of the system of non-linear difference equations. We then linearize the logged difference equations about a particular point (usually a steady state), and simplify until we have a system of linear difference equations where the variables of interest are percentage deviations about a point (again, usually a steady state). Linearization is nice because we know how to work with linear difference equations. Putting things in percentage terms (that's the \log" part) is nice because it provides natural interpretations of the units (i.e. everything is in percentage terms). First consider some arbitrary univariate function, f(x). Taylor's theorem tells us that this can be expressed as a power series about a particular point x∗, where x∗ belongs to the set of possible x values: f 0(x∗) f 00 (x∗) f (3)(x∗) f(x) = f(x∗) + (x − x∗) + (x − x∗)2 + (x − x∗)3 + ::: 1! 2! 3! Here f 0(x∗) is the first derivative of f with respect to x evaluated at the point x∗, f 00 (x∗) is the second derivative evaluated at the same point, f (3) is the third derivative, and so on. -

Approximation of a Function by a Polynomial Function
1 Approximation of a function by a polynomial function 1. step: Assuming that f(x) is differentiable at x = a, from the picture we see: 푓(푥) = 푓(푎) + ∆푓 ≈ 푓(푎) + 푓′(푎)∆푥 Linear approximation of f(x) at point x around x = a 푓(푥) = 푓(푎) + 푓′(푎)(푥 − 푎) 푅푒푚푎푛푑푒푟 푹 = 푓(푥) − 푓(푎) − 푓′(푎)(푥 − 푎) will determine magnitude of error Let’s try to get better approximation of f(x). Let’s assume that f(x) has all derivatives at x = a. Let’s assume there is a possible power series expansion of f(x) around a. ∞ 2 3 푛 푓(푥) = 푐0 + 푐1(푥 − 푎) + 푐2(푥 − 푎) + 푐3(푥 − 푎) + ⋯ = ∑ 푐푛(푥 − 푎) ∀ 푥 푎푟표푢푛푑 푎 푛=0 n 푓(푛)(푥) 푓(푛)(푎) 2 3 0 푓 (푥) = 푐0 + 푐1(푥 − 푎) + 푐2(푥 − 푎) + 푐3(푥 − 푎) + ⋯ 푓(푎) = 푐0 2 1 푓′(푥) = 푐1 + 2푐2(푥 − 푎) + 3푐3(푥 − 푎) + ⋯ 푓′(푎) = 푐1 2 2 푓′′(푥) = 2푐2 + 3 ∙ 2푐3(푥 − 푎) + 4 ∙ 3(푥 − 푎) ∙∙∙ 푓′′(푎) = 2푐2 2 3 푓′′′(푥) = 3 ∙ 2푐3 + 4 ∙ 3 ∙ 2(푥 − 푎) + 5 ∙ 4 ∙ 3(푥 − 푎) ∙∙∙ 푓′′′(푎) = 3 ∙ 2푐3 ⋮ (푛) (푛) n 푓 (푥) = 푛(푛 − 1) ∙∙∙ 3 ∙ 2 ∙ 1푐푛 + (푛 + 1)푛(푛 − 1) ⋯ 2푐푛+1(푥 − 푎) 푓 (푎) = 푛! 푐푛 ⋮ Taylor’s theorem If f (x) has derivatives of all orders in an open interval I containing a, then for each x in I, ∞ 푓(푛)(푎) 푓(푛)(푎) 푓(푛+1)(푎) 푓(푥) = ∑ (푥 − 푎)푛 = 푓(푎) + 푓′(푎)(푥 − 푎) + ⋯ + (푥 − 푎)푛 + (푥 − 푎)푛+1 + ⋯ 푛! 푛! (푛 + 1)! 푛=0 푛 ∞ 푓(푘)(푎) 푓(푘)(푎) = ∑ (푥 − 푎)푘 + ∑ (푥 − 푎)푘 푘! 푘! 푘=0 푘=푛+1 convention for the sake of algebra: 0! = 1 = 푇푛 + 푅푛 푛 푓(푘)(푎) 푇 = ∑ (푥 − 푎)푘 푝표푙푦푛표푚푎푙 표푓 푛푡ℎ 표푟푑푒푟 푛 푘! 푘=0 푓(푛+1)(푧) 푛+1 푅푛(푥) = (푥 − 푎) 푠 푟푒푚푎푛푑푒푟 푅푛 (푛 + 1)! Taylor’s theorem says that there exists some value 푧 between 푎 and 푥 for which: ∞ 푓(푘)(푎) 푓(푛+1)(푧) ∑ (푥 − 푎)푘 can be replaced by 푅 (푥) = (푥 − 푎)푛+1 푘! 푛 (푛 + 1)! 푘=푛+1 2 Approximating function by a polynomial function So we are good to go. -
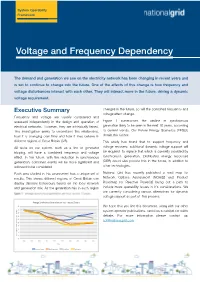
Voltage and Frequency Dependency
System Operability Framework Voltage and Frequency Dependency The demand and generation we see on the electricity network has been changing in recent years and is set to continue to change into the future. One of the affects of this change is how frequency and voltage disturbances interact with each other. They will interact more in the future, driving a dynamic voltage requirement. Executive Summary changes in the future, so will the combined frequency and voltage effect change. Frequency and voltage are usually considered and assessed independently in the design and operation of Figure 1 summarises the decline in synchronous electrical networks. However, they are intrinsically linked. generation likely to be seen in the next 10 years, according This investigation seeks to understand this relationship, to current trends. Our Future Energy Scenarios (FES)[1] how it is changing over time and how it may behave in details this further. different regions of Great Britain (GB). This study has found that to support frequency and All faults on our system, such as a line or generator voltage recovery, additional dynamic voltage support will tripping, will have a combined frequency and voltage be required to replace that which is currently provided by effect. In the future, with the reduction in synchronous synchronous generation. Distributed energy recourses generation, combined events will be more significant and (DER) could also provide this in the future, in addition to will need to be considered. other technologies. Each area studied in this assessment has a unique set of National Grid has recently published a road map for results.