OMAP-L137 C6000 DSP+ARM Processor
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
FAN53525 3.0A, 2.4Mhz, Digitally Programmable Tinybuck® Regulator
FAN53525 — 3.0 A, 2.4 MHz, June 2014 FAN53525 3.0A, 2.4MHz, Digitally Programmable TinyBuck® Regulator Digitally Programmable TinyBuck Digitally Features Description . Fixed-Frequency Operation: 2.4 MHz The FAN53525 is a step-down switching voltage regulator that delivers a digitally programmable output from an input . Best-in-Class Load Transient voltage supply of 2.5 V to 5.5 V. The output voltage is 2 . Continuous Output Current Capability: 3.0 A programmed through an I C interface capable of operating up to 3.4 MHz. 2.5 V to 5.5 V Input Voltage Range Using a proprietary architecture with synchronous . Digitally Programmable Output Voltage: rectification, the FAN53525 is capable of delivering 3.0 A - 0.600 V to 1.39375 V in 6.25 mV Steps continuous at over 80% efficiency, maintaining that efficiency at load currents as low as 10 mA. The regulator operates at Programmable Slew Rate for Voltage Transitions . a nominal fixed frequency of 2.4 MHz, which reduces the . I2C-Compatible Interface Up to 3.4 Mbps value of the external components to 330 nH for the output inductor and as low as 20 µF for the output capacitor. PFM Mode for High Efficiency in Light Load . Additional output capacitance can be added to improve . Quiescent Current in PFM Mode: 50 µA (Typical) regulation during load transients without affecting stability, allowing inductance up to 1.2 µH to be used. Input Under-Voltage Lockout (UVLO) ® At moderate and light loads, Pulse Frequency Modulation Regulator Thermal Shutdown and Overload Protection . (PFM) is used to operate in Power-Save Mode with a typical . -

Ebook - Informations About Operating Systems Version: August 15, 2006 | Download
eBook - Informations about Operating Systems Version: August 15, 2006 | Download: www.operating-system.org AIX Internet: AIX AmigaOS Internet: AmigaOS AtheOS Internet: AtheOS BeIA Internet: BeIA BeOS Internet: BeOS BSDi Internet: BSDi CP/M Internet: CP/M Darwin Internet: Darwin EPOC Internet: EPOC FreeBSD Internet: FreeBSD HP-UX Internet: HP-UX Hurd Internet: Hurd Inferno Internet: Inferno IRIX Internet: IRIX JavaOS Internet: JavaOS LFS Internet: LFS Linspire Internet: Linspire Linux Internet: Linux MacOS Internet: MacOS Minix Internet: Minix MorphOS Internet: MorphOS MS-DOS Internet: MS-DOS MVS Internet: MVS NetBSD Internet: NetBSD NetWare Internet: NetWare Newdeal Internet: Newdeal NEXTSTEP Internet: NEXTSTEP OpenBSD Internet: OpenBSD OS/2 Internet: OS/2 Further operating systems Internet: Further operating systems PalmOS Internet: PalmOS Plan9 Internet: Plan9 QNX Internet: QNX RiscOS Internet: RiscOS Solaris Internet: Solaris SuSE Linux Internet: SuSE Linux Unicos Internet: Unicos Unix Internet: Unix Unixware Internet: Unixware Windows 2000 Internet: Windows 2000 Windows 3.11 Internet: Windows 3.11 Windows 95 Internet: Windows 95 Windows 98 Internet: Windows 98 Windows CE Internet: Windows CE Windows Family Internet: Windows Family Windows ME Internet: Windows ME Seite 1 von 138 eBook - Informations about Operating Systems Version: August 15, 2006 | Download: www.operating-system.org Windows NT 3.1 Internet: Windows NT 3.1 Windows NT 4.0 Internet: Windows NT 4.0 Windows Server 2003 Internet: Windows Server 2003 Windows Vista Internet: Windows Vista Windows XP Internet: Windows XP Apple - Company Internet: Apple - Company AT&T - Company Internet: AT&T - Company Be Inc. - Company Internet: Be Inc. - Company BSD Family Internet: BSD Family Cray Inc. -

An Emerging Architecture in Smart Phones
International Journal of Electronic Engineering and Computer Science Vol. 3, No. 2, 2018, pp. 29-38 http://www.aiscience.org/journal/ijeecs ARM Processor Architecture: An Emerging Architecture in Smart Phones Naseer Ahmad, Muhammad Waqas Boota * Department of Computer Science, Virtual University of Pakistan, Lahore, Pakistan Abstract ARM is a 32-bit RISC processor architecture. It is develop and licenses by British company ARM holdings. ARM holding does not manufacture and sell the CPU devices. ARM holding only licenses the processor architecture to interested parties. There are two main types of licences implementation licenses and architecture licenses. ARM processors have a unique combination of feature such as ARM core is very simple as compare to general purpose processors. ARM chip has several peripheral controller, a digital signal processor and ARM core. ARM processor consumes less power but provide the high performance. Now a day, ARM Cortex series is very popular in Smartphone devices. We will also see the important characteristics of cortex series. We discuss the ARM processor and system on a chip (SOC) which includes the Qualcomm, Snapdragon, nVidia Tegra, and Apple system on chips. In this paper, we discuss the features of ARM processor and Intel atom processor and see which processor is best. Finally, we will discuss the future of ARM processor in Smartphone devices. Keywords RISC, ISA, ARM Core, System on a Chip (SoC) Received: May 6, 2018 / Accepted: June 15, 2018 / Published online: July 26, 2018 @ 2018 The Authors. Published by American Institute of Science. This Open Access article is under the CC BY license. -
Sitara™ Am57x Processor with Dual ARM® Cortex®-A15 Cores
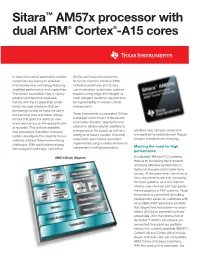
Sitara™ AM57x processor with dual ARM® Cortex®-A15 cores In today’s industrial automation market, (PLCs) and industrial computers consumers are seeing an evolution to human machine interface (HMI), that requires new technology featuring industrial peripherals and factory amplified performance and capabilities. communication, automation systems The factory automation floor is rapidly require cuttingedge technologies to advancing to become more user meet stringent customer requirements friendly with the incorporation of ele for high reliability in missioncritical ments like user interfaces that are environments. increasingly similar to those we use in our everyday lives and video compe Texas Instruments Incorporated (TI) has tencies that grant the ability to view a strategic commitment to the factory machines running on the opposite side automation industry, ranging from an of factories. This shift necessitates extensive, reliable solution portfolio to solutions very complex, expensive new processors that afford industrial a long product life supply as well as a and resistant to evolution even though system developers the capacity to suc strong localbased support. Industrial industry standards are changing. cessfully address these everevolving automation applications have been challenges. With applications ranging implemented using a variety of external Meeting the need for high from programmable logic controllers components making yesterday’s performance AM57x block diagram In industrial HMI and PLC systems, there is an increasing trend towards achieving x86level performance in fanless enclosures and smaller form factors. At the same time, communica tions requirements are ever increasing for these systems, as is the need for intuitive user interface and highperfor mance graphics in HMI systems. -

OMAP 3 Family of Multimedia Applications
OMAP™ 3 family of multimedia applications processors Revolutionizing entertainment and productivity Key features in wireless handheld commumications • Combines mobile entertainment and high-performance productivity applications. Product Bulletin • Integrates the advanced Superscalar ARM Cortex-A8 RISC core, enabling up to The OMAP™ 3 family of multimedia applications processors from Texas Instruments (TI) 3x gain in performance versus ARM11. introduces a new level of performance that enables laptop-like productivity and advanced • Designed in 45-nm (OMAP36x platform) entertainment in multimedia-enabled handsets. OMAP 3 devices support all levels of and 65-nm (OMAP34x platform) CMOS handsets, from the entry-level multimedia-enabled handsets to high-end Mobile Internet process technologies for less power Devices (MIDs). consumption and increased device performance. Entry-level Mid-level High-end • Includes integrated IVA hardware multimedia-enabled multimedia-enabled multimedia-enabled accelerators to enable multi-standard encode handsets handsets handsets decode up to HD resolution. OMAP3410 OMAP3420 OMAP3430/3440 • Available integrated image signal OMAP3610 OMAP3620 OMAP3630/3640 processor (ISP) enables faster, higher quality image capture, lower system cost TI’s OMAP 3 family of applications processors These devices can operate at a higher and lower power consumption. • Provides seamless connectivity to hard integrate the ARM Cortex-A8 superscalar frequency than previous-generation OMAP diskdrive (HDD) devices for mass storage. microprocessor -
Nomadik Application Processor Andrea Gallo Giancarlo Asnaghi ST Is #1 World-Wide Leader in Digital TV and Consumer Audio
Nomadik Application Processor Andrea Gallo Giancarlo Asnaghi ST is #1 world-wide leader in Digital TV and Consumer Audio MP3 Portable Digital Satellite Radio Set Top Box Player Digital Car Radio DVD Player MMDSP+ inside more than 200 million produced chips January 14, 2009 ST leader in mobile phone chips January 14, 2009 Nomadik Nomadik is based on this heritage providing: – Unrivalled multimedia performances – Very low power consumption – Scalable performances January 14, 2009 BestBest ApplicationApplication ProcessorProcessor 20042004 9 Lowest power consumption 9 Scalable performance 9 Video/Audio quality 9 Cost-effective Nominees: Intel XScale PXA260, NeoMagic MiMagic 6, Nvidia MQ-9000, STMicroelectronics Nomadik STn8800, Texas Instruments OMAP 1611 January 14, 2009 Nomadik Nomadik is a family of Application Processors – Distributed processing architecture ARM9 + multiple Smart Accelerators – Support of a wide range of OS and applications – Seamless integration in the OS through standard API drivers and MM framework January 14, 2009 roadmap ... January 14, 2009 Some Nomadik products on the market... January 14, 2009 STn8815 block diagram January 14, 2009 Nomadik : a true real time multiprocessor platform ARM926 SDRAM SRAM General (L1 + L2) Purpose •Unlimited Space (Level 2 •Limited Bandwidth Cache System for Video) DMA Master OS Memory Controller Peripherals multi-layer AHB bus RTOS RTOS Multi-thread (Scheduler FSM) NAND Flash MMDSP+ Video •Unlimited Space MMDSP+ Audio 66 MHz, 16-bit •“No” Bandwidth 133 MHz, 24-bit •Mass storage -
An Introduction to Morphos
An Introduction to MorphOS Updated to include features to version 1.4.5 May 14, 2005 MorphOS 1.4 This presentation gives an overview of MorphOS and the features that are present in the MorphOS 1.4 shipping product. For a fully comprehensive list please see the "Full Features list" which can be found at: www.PegasosPPC.com Why MorphOS? Modern Operating Systems are powerful, flexible and stable tools. For the most part, if you know how to look after them, they do their job reasonably well. But, they are just tools to do a job. They've lost their spark, they're boring. A long time ago computers were fun, it is this background that MorphOS came from and this is what MorphOS is for, making computers fun again. What is MorphOS? MorphOS is a fully featured desktop Operating System for PowerPC CPUs. It is small, highly responsive and has very low hardware requirements. The overall structure of MorphOS is based on a new modern kernel called Quark and a structure divided into a series of "boxes". This system allows different OS APIs to be used along side one another but isolates them so one cannot compromise the other. To make sure there is plenty of software to begin with the majority of development to date has been based on the A- BOX. In the future the more advanced Q-Box shall be added. Compatibility The A-Box is an entire PowerPC native OS layer which includes source and binary compatibility with software for the Commodore A500 / A1200 etc. -

Mediatek Inc
01 May 2015 Asia Pacific/Taiwan Equity Research Semiconductor Devices MediaTek Inc. (2454.TW / 2454 TT) Rating NEUTRAL* Price (30 Apr 15, NT$) 395.00 RESULTS Target price (NT$) 405.00¹ Upside/downside (%) 2.5 Mkt cap (NT$ mn) 708,117 (US$ 23,121) 2Q lacks growth, but a high bar is set for 2H Enterprise value (NT$ mn) 544,619 ■ 1Q15 results in line with CS, but below street. 1Q15 sales were already Number of shares (mn) 1,792.70 Free float (%) 89.1 reported at NT$47.5 bn, -14.3% QoQ. Smartphone shipments were 85 mn 52-week price range 535.0 - 390.0 (30mn LTE), down from 95-100mn in 4Q14 due to seasonality and emerging ADTO - 6M (US$ mn) 101.0 market weakness. GMs met our 47.3% vs 46-48% guidance and OpM was also *Stock ratings are relative to the coverage universe in each analyst's or each team's respective sector. in line at 16.1% on cost controls. Lower non-op income kept EPS only in line ¹Target price is for 12 months. with our NT$4.62 and below street's NT$4.97. Research Analysts ■ 2Q15 guidance below, inventory elevated. Sales were guided -5% to +3% Randy Abrams, CFA QoQ, below CS/street's +9%/+18% QoQ on 3G price pressure and 4G mix 886 2 2715 6366 [email protected] skewed to the entry level. Margins are in line, with GMs at 45.5-47.5% and Nickie Yue OpM at 12.5-16.5%. Inventory is elevated, at 102 days and guided to stay 886 2 2715 6364 98-110 days in 2Q15, requiring 2H15 acceleration. -

State Inconsistency Issues in Local Area Network-Based Distributed Kernels
State inconsistency issues in local area network-based distributed kernels K. Ravindran & Samuel T. Chanson Technical Report 85-7 August 1985 ABSTRACT State inconsistency is an inherent problem m distributed computing systems (DCS) because of the high degree of autonomy of the executing entities and the inherent delays and errors in communicating events among them. Thus any reliable DCS should provide means to recover from such errors. This paper discusses the state inconsistency issues and their solution techniques in local area network based distri buted kernels. In particular, we deal with state inconsistencies due to i) failures of processes, machines and/or the network, ii) packet losses, iii) new machines joining or exiting from the network, and iv) processes or hosts migrating from one machine to another in the network. The solutions presented are mostly provided within the ker nel itself and are transparent to the applications. I' State inconsistency issues in local area network-based distributed kernels 1.0 Introduction As local area network ( LAN ) technologies move out of the laboratory and into the market place interests in LAN-based distributed computing systems ( LDCS ) have become widespread. Several experimental LAN-based distributed kernels have been built in the last few years including the V-system (3), Rochester's Intelligent Gateway (6], PORT [9], Accent (7], SHOSHIN [11], DEMOS(13) and Eden [18] . These distributed ker nels manage objects which may physically reside on different machines. The executing entities in such systems exhibit a high degree of autonomy but may interact with one another from time to time. Thus a state change in one entity may cause the state of one or more other entities to change. -
Stormc 3 User Manual English
Projektverwaltung N 5 StormC The professional choice Users manual ANSI C/C++ Development- system for the Amiga StormC User Manual 1 N COPYRIGHT Copyright STORMC C/C++ DEVELOPMENT SYSTEM Software and manual (c) 1995-1999 HAAGE & PARTNER Computer GmbH Authors: All rights reserved. This manual and the accompanying Jochen Becher software are copyrighted. They may not be reproduced in Editor any form (whether partically or in whole) by any means of Project Manager procedure, sent, multiplied and/or spread or be translated Debugger into another language. Profiler HAAGE & PARTNER assumes no responsibility for damage, Libraries caused by or resulting from malfunction of the program, Librarian faulty copies or error in the manual are to be led back. ScreenManager Wizard.Library Jens Gelhar ANSI C Compiler C++ Compiler PPC-Frontend pOS-Compiler Michael Rock Optimizing Linker Patcher FD2PRAGMA PPC-Backend Copyrights and trademarks: Markus Nerding Amiga is a registered trademark of its owner. Jeroen T. Vermeulen Amiga, AmigaDOS, Kickstart and Workbench are trade- Wouter van Oortmerssen marks. Peter-Frans Hollants Georges Goncalves SAS and SAS / C are registered trademarks of the SAS Insti- Kersten Emmrich tute Inc. Manual Translation The designation of products which are not from the HAAGE Peter (dreamy) Traskalik & PARTNER COMPUTER GmbH serves information purpo- Hartwig Haage ses exclusively and presents no trademark abuse. Graphics 2 StormC - the professional choice Licensee agreement N LICENSEE AGREEMENT 1 In general (1) Object of this contract is the use of computer programs from the HAAGE & PART- NER COMPUTER GmbH, including the manual as well as other pertinent, written material, subsequently summed up as the product. -
Workbench December 2002 Issue 187
Workbench December 2002 Issue 187 December 2002 Workbench 1 Editorial Happy Christmas everyone, This month we have articles covering the Elbox Trojan Horse code fiasco. Editor Tony Mulvihill Thankfully Elbox have fixed their little indiscretion. We have a rather long 0415 161 271 article covering MorphOS. If you’ve been confused about MorphOS then this [email protected] article should clear the air on Amiga OS 4’s closest competitor. We also have Contributions the final in my Future Tech series, meeting pics from October/November and Contributions can be soft copy (on floppy½ disk) or all the current Ami news. hard copy. It will be returned if requested and Don’t forget this months meeting is December the 8th, one week earlier than accompanied with a self- addressed envelope. usual. So until next year, have a happy Christmas and a great start to the new The editor of the Amiga Users Group Inc. newsletter year from all the AUG committee. Cheers :-) Workbench retains the right Tony Mulvihill to edit contributions for clarity and length. over 30 units were sold by Anything Send contributions to: Amiga Users Group Amiga, most of which were the G4 P.O. Box 2389 Seaford Victoria 3198 version. [email protected] Advertising This Months Meeting Advertising space is free for members to sell private December 8th 2002 items or services. Version 2 of Amiga Quake has been For information on commercial rates, contact: released. This version supports 68k, Tony Mulvihill PPC and MorphOS. 0415 161 2721 [email protected] Last Months Meeting November 17th 2002 I’ll be demonstrating the 68k version Deadlines Workbench is published Latest news and info. -

Thich Nhat Hanh, Tulku Thondup, and Others
BRANCHES OF LIGHT ! 2 ! FALL - WINTER • 2011 - 12 ! YES,YES, LIFE!LIFE! -MAYMAY WWEE BBEE JJOINEDOINED IINN TTHEHE GGREATREAT HHEARTEART ! l CONTENTS ELCOME to our latest ANYEN HAS OFFERED a 5 Upcoming Banyen Events Wissue of Branches of Breal “gathering of the 6 New Music Light! You’ll find here 223 ways” since 1970, and we 7 New Videos BRANCHES OF LIGHT reviews of new books, continue to morph and 8 Art, Creativity & Music News & Reviews from 8 Poetry, Writing & Stories Banyen Books and Sound music, videos, audios— learn how best we can serve 10 Yoga & the Hindu Traditions gems among the latest new the deep learnings and 12 Buddhism & Zen ISSUE 39 Fall-Winter-Spring 2011-2012 releases in all our fields, earth-loving harmony we 15 Tibetan Buddhism 17 Taoism & Chi Energetics Publisher & Editor from healing arts, new sci- humans need as we mature 17 BodyMind Healing Kolin Lymworth ence, body-mind explo- into a sustainable, responsi- 18 Healing Energies / Herbs Managing Editor & Production ration, ecology and com- ble planetary stewardship. Michael Bertrand 20 Bodywork & Movement munity... to angels, new 21 Food, Nutrition & Healing Design Laura Duncan Good Look Graphics economics, gardening, AY YOU FIND HERE the 22 Inspiration & Empowerment Cover Fiona Gamiet Articulate Design alchemy and metaphysics, Mresources to nourish 23 Psychology, Therapy & Dreams 24 Midlife & ElderWisdom On the Cover shamanism, the spiritual your journey. Reviews here 25 Jungian & Depth Psychology Flowers from Lizanne’s garden... 25 Mythology & Symbolism a rainbow over Bowen Island... traditions of the world, and are just the waves atop an 26 Meditation conscious evolution.